MX2 Quick Start Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Disability Classification System
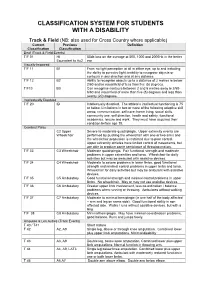
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -

2019 NFCA Texas High School Leadoff Classic Main Bracket Results
2019 NFCA Texas High School Leadoff Classic Main Bracket Results Bryan College Station BHS CSHS 1 Bryan College Station 17 Thu 3pm Thu 3pm Cedar Creek BHS CSHS EP Eastlake SA Brandeis 49 Brandeis College Station 57 Cy Woods 1 BHS Thu 5pm Thu 5pm CSHS 2 18 Thu 1pm Brandeis Robinson Thu 1pm EP Montwood BHS CSHS Robinson 11 Huntsville 3 89 Klein Splendora 93 Splendora 9 BHS Fri 2pm Fri 2pm CSHS 3 Fredericksburg Splendora 19 Thu 9am Thu 9am Fredericksburg 6 VET1 VET2 Belton 6 Grapevine 50 58 Richmond Foster 11 BHS Thu 5pm Klein Splendora Thu 5pm CSHS 4 20 Thu 11am Klein Richmond Foster Thu 11am Klein 11 BHS CSHS Rockwall 2 SA Southwest 9 97 SA Southwest Cedar Ridge 99 Cy Ranch 7 VET1 Fri 4pm Fri 4pm CP3 5 Southwest Cy Ranch 21 Thu 11am Thu 1pm Temple 5 VET1 CP3 Plano East 5 Clear Springs 2 51 Southwest Alvin 59 Alvin VET1 Thu 3pm Thu 5pm CP3 6 22 Thu 9am Vandegrift Alvin Thu 3pm Vandegrift 5 BHS CSHS Lufkin San Marcos 5 90 94 Flower Mound 0 VET2 Fri 12pm Southwest Cedar Ridge Fri 12pm CP4 7 San Marcos Cedar Ridge 23 Thu 9am Thu 1pm Magnolia West 3 VET2 CHAMPIONSHIP CP4 RR Cedar Ridge 12 McKinney Boyd 3 52 Game 192 60 SA Johnson VET2 Thu 3pm San Marcos BHS Cedar Ridge Thu 5 pm CP4 8 4:00 PM 24 Thu 11am M. Boyd BHS 5 10 BHS Johnson Thu 3pm Manvel 0 129 Southwest vs. Cedar Ridge 130 Kingwood Park Bellaire 3 Sat 10am Sat 8am Deer Park VET4 BRAC-BB 9 Cedar Park Deer Park 25 Thu 11am Thu 1pm Cedar Park 5 VET4 BRAC-BB Leander Clements 13 53 Cedar Park MacArthur 61 SA MacArthur VET4 Thu 3pm Thu 5pm BRAC-BB 10 26 Thu 9am Clements MacArthur Thu 3pm Waco University 0 BHS CSHS Tomball Memorial Cy Fair 4 91 Friendswood Woodlands 95 Woodlands 2 VET5 Fri 8am Fri 8am BRAC-YS 11 San Benito Woodlands 27 Thu 11am Thu 1pm San Benito 10 VET5 BRAC-YS SA Holmes 1 Friendswood 10 54 62 Santa Fe VET5 Thu 3pm Friendswood Woodlands Thu 5pm BRAC-YS 12 28 Thu 9am Friendswood Santa Fe Thu 3pm Henderson 0 VET1 VET2 Lake Travis Ridge Point 16 98 100 B. -

Classification Made Easy Class 1
Classification Made Easy Class 1 (CP1) The most severely disabled athletes belong to this classification. These athletes are dependent on a power wheelchair or assistance for mobility. They have severe limitation in both the arms and the legs and have very poor trunk control. Sports Available: • Race Runner (RR1) – using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 1 (BC1) – players who fit into this category can throw the ball onto the court or a CP2 Lower who chooses to push the ball with the foot. Each BC1 athlete has a sport assistant on court with them. o Boccia Class 3 (BC3) – players who fit into this category cannot throw the ball onto the court and have no sustained grasp or release action. They will use a “chute” or “ramp” with the help from their sport assistant to propel the ball. They may use head or arm pointers to hold and release the ball. Players with a impairment of a non cerebral origin, severely affecting all four limbs, are included in this class. Class 2 (CP2) These athletes have poor strength or control all limbs but are able to propel a wheelchair. Some Class 2 athletes can walk but can never run functionally. The class 2 athletes can throw a ball but demonstrates poor grasp and release. Sports Available: • Race Runner (RR2) - using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 2 (BC2) – players can throw the ball into the court consistently and do not need on court assistance. -

An Advanced System of the Mitochondrial Processing Peptidase and Core Protein Family in Trypanosoma Brucei and Multiple Origins of the Core I Subunit in Eukaryotes
GBE An Advanced System of the Mitochondrial Processing Peptidase and Core Protein Family in Trypanosoma brucei and Multiple Origins of the Core I Subunit in Eukaryotes Jan Mach1, Pavel Poliak2,3,AnnaMatusˇkova´ 4,Vojteˇch Zˇa´rsky´1,Jirˇı´ Janata4, Julius Lukesˇ2,3,and Jan Tachezy1,* 1Department of Parasitology, Faculty of Science, Charles University, Prague, Czech Republic 2Institute of Parasitology, Biology Centre, Czech Academy of Sciences, Prague, Czech Republic 3Faculty of Science, University of South Bohemia, Cˇ eske´ Budeˇjovice, Budweis, Czech Republic 4Institute of Microbiology, Czech Academy of Sciences, Prague, Czech Republic *Corresponding author: E-mail: [email protected]. Accepted: April 2, 2013 Abstract Mitochondrial processing peptidase (MPP) consists of a and b subunits that catalyze the cleavage of N-terminal mitochondrial- targeting sequences (N-MTSs) and deliver preproteins to the mitochondria. In plants, both MPP subunits are associated with the respiratory complex bc1, which has been proposed to represent an ancestral form. Subsequent duplication of MPP subunits resulted in separate sets of genes encoding soluble MPP in the matrix and core proteins (cp1 and cp2) of the membrane-embedded bc1 complex. As only a-MPP was duplicated in Neurospora,itssingleb–MPP functions in both MPP and bc1 complexes. Herein, we investigated the MPP/core protein family and N-MTSs in the kinetoplastid Trypanosoma brucei, which is often considered one of the most ancient eukaryotes. Analysis of N-MTSs predicted in 336 mitochondrial proteins showed that trypanosomal N-MTSs were comparable with N-MTSs from other organisms. N-MTS cleavage is mediated by a standard heterodimeric MPP, which is present in the matrix of procyclic and bloodstream trypanosomes, and its expression is essential for the parasite. -

Technology Enhancement and Ethics in the Paralympic Games
UNIVERSITY OF PELOPONNESE FACULTY OF HUMAN MOVEMENT AND QUALITY OF LIFE SCIENCES DEPARTMENT OF SPORTS ORGANIZATION AND MANAGEMENT MASTER’S THESIS “OLYMPIC STUDIES, OLYMPIC EDUCATION, ORGANIZATION AND MANAGEMENT OF OLYMPIC EVENTS” Technology Enhancement and Ethics In the Paralympic Games Stavroula Bourna Sparta 2016 i TECHNOLOGY ENHANCEMENT AND ETHICS IN THE PARALYMPIC GAMES By Stavroula Bourna MASTER Thesis submitted to the professorial body for the partial fulfillment of obligations for the awarding of a post-graduate title in the Post-graduate Programme, "Organization and Management of Olympic Events" of the University of the Peloponnese, in the branch "Olympic Education" Sparta 2016 Approved by the Professor body: 1st Supervisor: Konstantinos Georgiadis Prof. UNIVERSITY OF PELOPONNESE, GREECE 2nd Supervisor: Konstantinos Mountakis Prof. UNIVERSITY OF PELOPONNESE, GREECE 3rd Supervisor: Paraskevi Lioumpi, Prof., GREECE ii Copyright © Stavroula Bourna, 2016 All rights reserved. The copying, storage and forwarding of the present work, either complete or in part, for commercial profit, is forbidden. The copying, storage and forwarding for non profit-making, educational or research purposes is allowed under the condition that the source of this information must be mentioned and the present stipulations be adhered to. Requests concerning the use of this work for profit-making purposes must be addressed to the author. The views and conclusions expressed in the present work are those of the writer and should not be interpreted as representing the official views of the Department of Sports’ Organization and Management of the University of the Peloponnese. iii ABSTRACT Stavroula Bourna: Technology Enhancement and Ethics in the Paralympic Games (Under the supervision of Konstantinos Georgiadis, Professor) The aim of the present thesis is to present how the new technological advances can affect the performance of the athletes in the Paralympic Games. -

Generalized CP Symmetries and Special Regions of Parameter Space in the Two-Higgs-Doublet Model
PHYSICAL REVIEW D 79, 116004 (2009) Generalized CP symmetries and special regions of parameter space in the two-Higgs-doublet model P.M. Ferreira,1,2 Howard E. Haber,3 and Joa˜o P. Silva1,4 1Instituto Superior de Engenharia de Lisboa, Rua Conselheiro Emı´dio Navarro, 1900 Lisboa, Portugal 2Centro de Fı´sica Teo´rica e Computacional, Faculdade de Cieˆncias, Universidade de Lisboa, Av. Prof. Gama Pinto 2, 1649-003 Lisboa, Portugal 3Santa Cruz Institute for Particle Physics, University of California, Santa Cruz, California 95064, USA 4Centro de Fı´sica Teo´rica de Partı´culas, Instituto Superior Te´cnico, P-1049-001 Lisboa, Portugal (Received 27 March 2009; published 15 June 2009) We consider the impact of imposing generalized CP symmetries on the Higgs sector of the two-Higgs- doublet model, and identify three classes of symmetries. Two of these classes constrain the scalar potential parameters to an exceptional region of parameter space, which respects either a Z2 discrete flavor symmetry or a Uð1Þ symmetry. We exhibit a basis-invariant quantity that distinguishes between these two possible symmetries. We also show that the consequences of imposing these two classes of CP symmetry can be achieved by combining Higgs family symmetries, and that this is not possible for the usual CP symmetry. We comment on the vacuum structure and on renormalization in the presence of these symmetries. Finally, we demonstrate that the standard CP symmetry can be used to build all the models we identify, including those based on Higgs family symmetries. DOI: 10.1103/PhysRevD.79.116004 PACS numbers: 11.30.Er, 11.30.Ly, 12.60.Fr, 14.80.Cp metry. -

Reconstruction from the Deck of K-Vertex Induced Subgraphs
Reconstruction from the deck of k-vertex induced subgraphs Hannah Spinoza∗ and Douglas B. West† Revised July 2018 Abstract The k-deck of a graph is its multiset of subgraphs induced by k vertices; we study what can be deduced about a graph from its k-deck. We strengthen a result of Manvel 2 by proving for ℓ ∈ N that when n is large enough (n > 2ℓ(ℓ+1) suffices), the (n − ℓ)- deck determines whether an n-vertex graph is connected (n ≥ 25 suffices when ℓ = 3, and n ≤ 2l cannot suffice). The reconstructibility ρ(G) of a graph G with n vertices is the largest ℓ such that G is determined by its (n − ℓ)-deck. We generalize a result of Bollob´as by showing ρ(G) ≥ (1 − o(1))n/2 for almost all graphs. As an upper bound on min ρ(G), we have ρ(Cn) = ⌈n/2⌉ = ρ(Pn) + 1. More generally, we compute ρ(G) whenever ∆(G) = 2, which involves extending a result of Stanley. Finally, we show that a complete r-partite graph is reconstructible from its (r + 1)-deck. MSC Codes: 05C60, 05C07 Key words: graph reconstruction, deck, reconstructibility, connected, random graph 1 Introduction A card of a graph G is a subgraph of G obtained by deleting one vertex. Cards are unlabeled, so only the isomorphism class of a card is given. The deck of G is the multiset of all cards of G. A graph is reconstructible if it is uniquely determined by its deck. The famous Reconstruction Conjecture was first posed in 1942. -
Dimension 4: Getting Something from Nothing
DIMENSION 4: GETTING SOMETHING FROM NOTHING RON STERN UNIVERSITY OF CALIFORNIA, IRVINE MAY 6, 2010 JOINT WORK WITH RON FINTUSHEL Topological n-manifold: locally homeomorphic to Rn TOPOLOGICAL VS. SMOOTH MANIFOLDS Topological n-manifold: locally homeomorphic to Rn VS Smooth n-manifold: locally diffeomorphic to Rn TOPOLOGICAL VS. SMOOTH MANIFOLDS Topological n-manifold: locally homeomorphic to Rn VS Smooth n-manifold: locally diffeomorphic to Rn Low dimensions: n=1,2,3 topological smooth ⇐⇒ TOPOLOGICAL VS. SMOOTH MANIFOLDS Topological n-manifold: locally homeomorphic to Rn VS Smooth n-manifold: locally diffeomorphic to Rn Low dimensions: n=1,2,3 topological smooth ⇐⇒ High dimensions: n > 4: smooth structures on topological mflds determined up to finite indeterminacy by characteristic classes of the tangent bundle TOPOLOGICAL VS. SMOOTH MANIFOLDS DIMENSION 4 Techniques from other dimensions do not apply (in fact fail in a rather dramatic fashion) DIMENSION 4 Techniques from other dimensions do not apply (in fact fail in a rather dramatic fashion) IN FACT IT COULD BE THE CASE THAT EVERY CLOSED TOPOLOGICAL MANIFOLD HAS EITHER NO OR INFINITELY MANY SMOOTH STRUCTURES! NO KNOWN COUNTEREXAMPLE DIMENSION 4 Techniques from other dimensions do not apply (in fact fail in a rather dramatic fashion) IN FACT IT COULD BE THE CASE THAT EVERY CLOSED TOPOLOGICAL MANIFOLD HAS EITHER NO OR INFINITELY MANY SMOOTH STRUCTURES! NO KNOWN COUNTEREXAMPLE HOW TO PROVE (OR DISPROVE) SUCH A WILD STATEMENT? FOR SIMPLICITY LET’S ASSUME SIMPLY-CONNECTED Classification of -

An Exotic Smooth Structure on CP #6CP2
ISSN 1364-0380 (on line) 1465-3060 (printed) 813 eometry & opology G T G T Volume 9 (2005) 813–832 GG T T T G T G T Published: 18 May 2005 G T G T T G T G T G T G T G G G G T T An exotic smooth structure on CP2#6CP2 Andras´ I Stipsicz Zoltan´ Szabo´ R´enyi Institute of Mathematics, Hungarian Academy of Sciences H-1053 Budapest, Re´altanoda utca 13–15, Hungary and Institute for Advanced Study, Princeton, NJ 08540, USA Email: [email protected], [email protected] Department of Mathematics, Princeton University Princeton, NJ 08544, USA Email: [email protected] Abstract We construct smooth 4–manifolds homeomorphic but not diffeomorphic to CP2#6CP2 . AMS Classification numbers Primary: 53D05, 14J26 Secondary: 57R55, 57R57 Keywords: Exotic smooth 4–manifolds, Seiberg–Witten invariants, rational blow-down, rational surfaces Proposed:PeterOzsvath Received:6December2004 Seconded: Ronald Fintushel, Tomasz Mrowka Accepted: 2 May 2005 c eometry & opology ublications G T P 814 Andr´as I Stipsicz and Zolt´an Szab´o 1 Introduction Based on work of Freedman [7] and Donaldson [2], in the mid 80’s it became possible to show the existence of exotic smooth structures on closed simply con- nected 4–manifolds. On one hand, Freedman’s classification theorem of simply connected, closed topological 4–manifolds could be used to show that various constructions provide homeomorphic 4–manifolds, while the computation of Donaldson’s instanton invariants provided a smooth invariant distinguishing appropriate examples up to diffeomorphism, see [3] for the first such compu- tation. -
R28 100 2K2 R16 100 R11 +3V VCC VCC VCC VCC CP2 100Nf TCK TDI TDO TMS TRST BC Cmdin Cmdout Dout Reset 100Nf CP1 ASDBLR Nsen
+3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V +3V CPA101CPA102CPA103CPA104CPA105CPA106CPA107CPA108CPA109CPA110CPA111CPA112CPA113CPA114CPA115CPA116 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V -3V CPN101CPN102CPN103CPN104CPN105CPN106CPN107CPN108CPN109CPN110CPN111CPN112CPN113CPN114CPN115CPN116 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 100nF 17 18 19 20 21 Reset CmdOut1 Reset CmdOut1 Reset CmdOut1 Reset CmdOut1 Reset CmdOut1 Reset CmdOut Reset CmdOut Reset CmdOut Reset CmdOut Reset CmdOut _Reset _CmdOut1 _Reset _CmdOut1 _Reset _CmdOut1 _Reset _CmdOut1 _Reset _CmdOut1 _Reset _CmdOut _Reset _CmdOut _Reset _CmdOut +3V+3V _Reset _CmdOut _Reset _CmdOut CmdIn1 _Dout17 CmdIn1 _Dout18 CmdIn1 _Dout19 R21 CmdIn1 _Dout20 CmdIn1 _Dout21 CmdIn Dout CmdIn Dout CmdIn Dout CmdIn Dout CmdIn Dout _CmdIn1 Dout17 _CmdIn1 Dout18 _CmdIn1 Dout19 _CmdIn1 Dout20 _CmdIn1 Dout21 _CmdIn _Dout _CmdIn _Dout _CmdIn _Dout _CmdIn _Dout _CmdIn _Dout 2k2 R23 100 BC1 BC1 BC1 BC1 BC1 BC ASDBLR_Psense_In BC ASDBLR_Psense_In BC ASDBLR_Psense_In BC ASDBLR_Psense_In BC ASDBLR_Psense_In _BC1 _BC1 _BC1 _BC1 _BC1 _BC ASDBLR_Nsense_In _BC ASDBLR_Nsense_In _BC ASDBLR_Nsense_In _BC ASDBLR_Nsense_In _BC ASDBLR_Nsense_In R27 ASDBLR_GNDsense_In ASDBLR_GNDsense_In ASDBLR_GNDsense_In NM ASDBLR_GNDsense_In ASDBLR_GNDsense_In MonEn MonA MonEn MonA MonEn MonA MonEn MonA MonEn MonA VCC VCC VCC VCC VCC MonB MonB MonB MonB MonB -

Four-Manifolds up to Connected Sum with Complex Projective Planes
FOUR-MANIFOLDS UP TO CONNECTED SUM WITH COMPLEX PROJECTIVE PLANES DANIEL KASPROWSKI, MARK POWELL, AND PETER TEICHNER Abstract. We show that closed, connected 4-manifolds up to connected sum with copies of the complex projective plane are classified in terms of the fun- damental group, the orientation character and an extension class involving the second homotopy group. For fundamental groups that are torsion free or have one end, we reduce this further to a classification in terms of the homotopy 2-type. 1. Introduction We give an explicit, algebraic classification of closed 4-manifolds up to connected 2 sum with copies of the complex projective plane CP . After the great success of Thurston's geometrisation of 3-manifolds, the clas- sification of closed 4-manifolds remains one of the most exciting open problems in topology. The exactness of the surgery sequence and the s-cobordism theo- rem are known for topological 4-manifolds with good fundamental groups, a class of groups that includes all solvable groups [FT95, KQ00]. However, a homeo- morphism classification is only known for closed 4-manifolds with trivial [Fre82], cyclic [FQ90, Kre99, HK88] or Baumslag-Solitar [HKT09] fundamental group. For smooth 4-manifolds, gauge theory provides obstructions even to once hoped- for foundational results like simply connected surgery and h-cobordism, which hold in all higher dimensions. There is no proposed diffeomorphism classification in sight, indeed even understanding homotopy 4-spheres is beyond us at present. Most of the invariants derived from gauge theory depend on an orientation and do not change 2 under connected sum with CP , but the differences dissolve under connected sum 2 2 with CP . -

4-Manifold Topology (Pdf)
Four Manifold Topology George Torres M392C - Fall 2018 - Professor Bob Gompf 1 Introduction 2 1.1 Examples of 4-Manifolds . .2 2 Signatures and 4-Manifolds 4 2.1 Signatures of Smooth Manifolds . .4 2.2 Complex Projective Varieties . .4 2.3 Unimodular Forms . .6 2.4 Realizing Unimodular Forms . .7 3 Handlebodies and Kirby Diagrams 8 3.1 Attaching a handle to the disk . .9 3.2 Handlebodies . 10 3.3 Handle operations . 11 3.4 Dimension 3 - Heegaard Diagrams . 12 3.5 Dimension 4 - Kirby Diagrams . 13 3.6 Framings and Links . 13 4 Kirby Calculus and Surgery Theory 16 4.1 Blowups and Kirby Calculus . 16 4.2 Surgery.................................................... 16 4.3 Surgery in 3-manifolds . 19 4.4 Spin Structures . 20 A Appendix 22 A.1 Bonus Lecture: Exotic R4 .......................................... 22 A.2 Solutions to selected Exercises . 22 Last updated February 13, 2019 1 1. Introduction v The main question in the theory of manifolds is classification. Manifolds of dimension 1 and 2 have been classified since the 19th century. Though 3 dimensional manifolds are not yet classified, they have been well- understood throughout the 20th century to today. A seminal result was the Poincaré Conjecture, which was solved in the early 2000’s. For dimensions n ≥ 4, manifolds can’t be classified due to an obstruction of decid- ability on the fundamental group. One way around this is to consider simply connected n-manifolds; in this case there are some limited classification theorems. For n ≥ 5, tools like surgery theory and the S-cobordism theorem developed in the 1960’s allowed mathematicians to approach classification theorems as well.