4-Manifold Topology (Pdf)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Disability Classification System
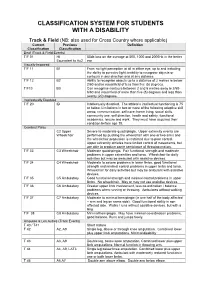
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -

Commentary on the Kervaire–Milnor Correspondence 1958–1961
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 52, Number 4, October 2015, Pages 603–609 http://dx.doi.org/10.1090/bull/1508 Article electronically published on July 1, 2015 COMMENTARY ON THE KERVAIRE–MILNOR CORRESPONDENCE 1958–1961 ANDREW RANICKI AND CLAUDE WEBER Abstract. The extant letters exchanged between Kervaire and Milnor during their collaboration from 1958–1961 concerned their work on the classification of exotic spheres, culminating in their 1963 Annals of Mathematics paper. Michel Kervaire died in 2007; for an account of his life, see the obituary by Shalom Eliahou, Pierre de la Harpe, Jean-Claude Hausmann, and Claude We- ber in the September 2008 issue of the Notices of the American Mathematical Society. The letters were made public at the 2009 Kervaire Memorial Confer- ence in Geneva. Their publication in this issue of the Bulletin of the American Mathematical Society is preceded by our commentary on these letters, provid- ing some historical background. Letter 1. From Milnor, 22 August 1958 Kervaire and Milnor both attended the International Congress of Mathemati- cians held in Edinburgh, 14–21 August 1958. Milnor gave an invited half-hour talk on Bernoulli numbers, homotopy groups, and a theorem of Rohlin,andKer- vaire gave a talk in the short communications section on Non-parallelizability of the n-sphere for n>7 (see [2]). In this letter written immediately after the Congress, Milnor invites Kervaire to join him in writing up the lecture he gave at the Con- gress. The joint paper appeared in the Proceedings of the ICM as [10]. Milnor’s name is listed first (contrary to the tradition in mathematics) since it was he who was invited to deliver a talk. -

Gluing Maps and Cobordism Maps for Sutured Monopole Floer Homology
Gluing maps and cobordism maps for sutured monopole Floer homology Zhenkun Li Abstract The naturality of sutured monopole Floer homology, which was introduced by Kronheimer and Mrowka [17], is an important ques- tion and is partially answered by Baldwin and Sivek [1]. In this paper we construct the cobordism maps for sutured monopole Floer homology, thus improve its naturality. The construction can be carried out for sutured instantons as well. In the paper we also con- struct gluing maps in sutured monopoles and sutured instantons. Contents 1 Introduction 3 1.1 Maintheoremsandbackgrounds. 3 1.2 Outlineoftheproof....................... 6 1.3 Futurequestions ........................ 9 2 Prelimilaries 11 2.1 Monopole Floer homology for 3´manifold . 11 2.2 SuturedmonopoleFloerhomology . 12 2.3 The naturality of sutured monopole Floer homology . 14 3 Handle gluing maps and cancelations 21 3.1 Prelimilary discussions . 21 arXiv:1810.13071v3 [math.GT] 15 Jul 2019 3.2 Constructions of handle gluing maps . 26 3.3 Basicpropertiesofhandleattachingmaps . 31 4 The general gluing maps 45 1 Zhenkun Li CONTENTS 5 The cobordism maps 50 5.1 Constructions and functoriality . 50 5.2 Duality and turning cobordism around . 52 6 A brief discussion on Instanton 58 2 Zhenkun Li 1 INTRODUCTION 1 Introduction 1.1 Main theorems and backgrounds Sutured manifold is a powerful tool introduced by Gabai [6] in 1983, to study the topology of 3-manifolds. In 2010, the construction of monopole Floer homology was carried out on balanced sutured manifold by Kron- heimer and Mrowka [17]. The combination of Floer theories and sutured manifolds has many important applications. -
![Arxiv:1303.6028V2 [Math.DG] 29 Dec 2014 B Ahrglrlvlhprufc Scle an Called Is Hypersurface Level Regular Each E Scle the Called Is Set E.[T3 )](https://docslib.b-cdn.net/cover/6643/arxiv-1303-6028v2-math-dg-29-dec-2014-b-ahrglrlvlhprufc-scle-an-called-is-hypersurface-level-regular-each-e-scle-the-called-is-set-e-t3-216643.webp)
Arxiv:1303.6028V2 [Math.DG] 29 Dec 2014 B Ahrglrlvlhprufc Scle an Called Is Hypersurface Level Regular Each E Scle the Called Is Set E.[T3 )
ISOPARAMETRIC FUNCTIONS ON EXOTIC SPHERES CHAO QIAN AND ZIZHOU TANG Abstract. This paper extends widely the work in [GT13]. Existence and non-existence results of isoparametric functions on exotic spheres and Eells-Kuiper projective planes are established. In particular, every homotopy n-sphere (n > 4) carries an isoparametric function (with certain metric) with 2 points as the focal set, in strong contrast to the classification of cohomogeneity one actions on homotopy spheres [St96] ( only exotic Kervaire spheres admit cohomogeneity one actions besides the standard spheres ). As an application, we improve a beautiful result of B´erard-Bergery [BB77] ( see also pp.234-235 of [Be78] ). 1. Introduction Let N be a connected complete Riemannian manifold. A non-constant smooth function f on N is called transnormal, if there exists a smooth function b : R R such that f 2 = → |∇ | b( f ), where f is the gradient of f . If in addition, there exists a continuous function a : ∇ R R so that f = a( f ), where f is the Laplacian of f , then f is called isoparametric. → △ △ Each regular level hypersurface is called an isoparametric hypersurface and the singular level set is called the focal set. The two equations of the function f mean that the regular level hypersurfaces of f are parallel and have constant mean curvatures, which may be regarded as a geometric generalization of cohomogeneity one actions in the theory of transformation groups ( ref. [GT13] ). Owing to E. Cartan and H. F. M¨unzner [M¨u80], the classification of isoparametric hy- persurfaces in a unit sphere has been one of the most challenging problems in submanifold geometry. -
![LEGENDRIAN LENS SPACE SURGERIES 3 Where the Ai ≥ 2 Are the Terms in the Negative Continued Fraction Expansion P 1 = A0 − =: [A0,...,Ak]](https://docslib.b-cdn.net/cover/1155/legendrian-lens-space-surgeries-3-where-the-ai-2-are-the-terms-in-the-negative-continued-fraction-expansion-p-1-a0-a0-ak-291155.webp)
LEGENDRIAN LENS SPACE SURGERIES 3 Where the Ai ≥ 2 Are the Terms in the Negative Continued Fraction Expansion P 1 = A0 − =: [A0,...,Ak]
LEGENDRIAN LENS SPACE SURGERIES HANSJORG¨ GEIGES AND SINEM ONARAN Abstract. We show that every tight contact structure on any of the lens spaces L(ns2 − s + 1,s2) with n ≥ 2, s ≥ 1, can be obtained by a single Legendrian surgery along a suitable Legendrian realisation of the negative torus knot T (s, −(sn − 1)) in the tight or an overtwisted contact structure on the 3-sphere. 1. Introduction A knot K in the 3-sphere S3 is said to admit a lens space surgery if, for some rational number r, the 3-manifold obtained by Dehn surgery along K with surgery coefficient r is a lens space. In [17] L. Moser showed that all torus knots admit lens space surgeries. More precisely, −(ab ± 1)-surgery along the negative torus knot T (a, −b) results in the lens space L(ab ± 1,a2), cf. [21]; for positive torus knots one takes the mirror of the knot and the surgery coefficient of opposite sign, resulting in a negatively oriented lens space. Contrary to what was conjectured by Moser, there are surgeries along other knots that produce lens spaces. The first example was due to J. Bailey and D. Rolfsen [1], who constructed the lens space L(23, 7) by integral surgery along an iterated cable knot. The question which knots admit lens space surgeries is still open and the subject of much current research. The fundamental result in this area is due to Culler– Gordon–Luecke–Shalen [2], proved as a corollary of their cyclic surgery theorem: if K is not a torus knot, then at most two surgery coefficients, which must be successive integers, can correspond to a lens space surgery. -

EXOTIC SPHERES and CURVATURE 1. Introduction Exotic
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 45, Number 4, October 2008, Pages 595–616 S 0273-0979(08)01213-5 Article electronically published on July 1, 2008 EXOTIC SPHERES AND CURVATURE M. JOACHIM AND D. J. WRAITH Abstract. Since their discovery by Milnor in 1956, exotic spheres have pro- vided a fascinating object of study for geometers. In this article we survey what is known about the curvature of exotic spheres. 1. Introduction Exotic spheres are manifolds which are homeomorphic but not diffeomorphic to a standard sphere. In this introduction our aims are twofold: First, to give a brief account of the discovery of exotic spheres and to make some general remarks about the structure of these objects as smooth manifolds. Second, to outline the basics of curvature for Riemannian manifolds which we will need later on. In subsequent sections, we will explore the interaction between topology and geometry for exotic spheres. We will use the term differentiable to mean differentiable of class C∞,and all diffeomorphisms will be assumed to be smooth. As every graduate student knows, a smooth manifold is a topological manifold that is equipped with a smooth (differentiable) structure, that is, a smooth maximal atlas. Recall that an atlas is a collection of charts (homeomorphisms from open neighbourhoods in the manifold onto open subsets of some Euclidean space), the domains of which cover the manifold. Where the chart domains overlap, we impose a smooth compatibility condition for the charts [doC, chapter 0] if we wish our manifold to be smooth. Such an atlas can then be extended to a maximal smooth atlas by including all possible charts which satisfy the compatibility condition with the original maps. -

Mapping Class Group of a Handlebody
FUNDAMENTA MATHEMATICAE 158 (1998) Mapping class group of a handlebody by Bronis law W a j n r y b (Haifa) Abstract. Let B be a 3-dimensional handlebody of genus g. Let M be the group of the isotopy classes of orientation preserving homeomorphisms of B. We construct a 2-dimensional simplicial complex X, connected and simply-connected, on which M acts by simplicial transformations and has only a finite number of orbits. From this action we derive an explicit finite presentation of M. We consider a 3-dimensional handlebody B = Bg of genus g > 0. We may think of B as a solid 3-ball with g solid handles attached to it (see Figure 1). Our goal is to determine an explicit presentation of the map- ping class group of B, the group Mg of the isotopy classes of orientation preserving homeomorphisms of B. Every homeomorphism h of B induces a homeomorphism of the boundary S = ∂B of B and we get an embedding of Mg into the mapping class group MCG(S) of the surface S. z-axis α α α α 1 2 i i+1 . . β β 1 2 ε x-axis i δ -2, i Fig. 1. Handlebody An explicit and quite simple presentation of MCG(S) is now known, but it took a lot of time and effort of many people to reach it (see [1], [3], [12], 1991 Mathematics Subject Classification: 20F05, 20F38, 57M05, 57M60. This research was partially supported by the fund for the promotion of research at the Technion. [195] 196 B.Wajnryb [9], [7], [11], [6], [14]). -
![[Math.GT] 31 Mar 2004](https://docslib.b-cdn.net/cover/0204/math-gt-31-mar-2004-410204.webp)
[Math.GT] 31 Mar 2004
CORES OF S-COBORDISMS OF 4-MANIFOLDS Frank Quinn March 2004 Abstract. The main result is that an s-cobordism (topological or smooth) of 4- manifolds has a product structure outside a “core” sub s-cobordism. These cores are arranged to have quite a bit of structure, for example they are smooth and abstractly (forgetting boundary structure) diffeomorphic to a standard neighborhood of a 1-complex. The decomposition is highly nonunique so cannot be used to define an invariant, but it shows the topological s-cobordism question reduces to the core case. The simply-connected version of the decomposition (with 1-complex a point) is due to Curtis, Freedman, Hsiang and Stong. Controlled surgery is used to reduce topological triviality of core s-cobordisms to a question about controlled homotopy equivalence of 4-manifolds. There are speculations about further reductions. 1. Introduction The classical s-cobordism theorem asserts that an s-cobordism of n-manifolds (the bordism itself has dimension n + 1) is isomorphic to a product if n ≥ 5. “Isomorphic” means smooth, PL or topological, depending on the structure of the s-cobordism. In dimension 4 it is known that there are smooth s-cobordisms without smooth product structures; existence was demonstrated by Donaldson [3], and spe- cific examples identified by Akbulut [1]. In the topological case product structures follow from disk embedding theorems. The best current results require “small” fun- damental group, Freedman-Teichner [5], Krushkal-Quinn [9] so s-cobordisms with these groups are topologically products. The large fundamental group question is still open. Freedman has developed several link questions equivalent to the 4-dimensional “surgery conjecture” for arbitrary fundamental groups. -
Introduction to the Berge Conjecture
Introduction to the Berge Conjecture Gemma Halliwell School of Mathematics and Statistics, University of Sheffield 8th June 2015 Outline Introduction Dehn Surgery Definition Example Lens Spaces and the Berge conjecture Lens Spaces Berge Knots Martelli and Petronio Baker Families of Berge Knots Outline Introduction Dehn Surgery Definition Example Lens Spaces and the Berge conjecture Lens Spaces Berge Knots Martelli and Petronio Baker Families of Berge Knots It is not yet known whether [the partial filling on the 3-chain link]... gives rise to Berge knots. In this talk I will aim to answer this question and discuss how this relates to the Berge conjecture and future work. Introduction In their 2008 paper, “Dehn Surgery and the magic 3-manifold”, Martelli and Pertronio ended with the following statement: In this talk I will aim to answer this question and discuss how this relates to the Berge conjecture and future work. Introduction It is not yet known whether [the partial filling on the 3-chain link]... gives rise to Berge knots. Introduction It is not yet known whether [the partial filling on the 3-chain link]... gives rise to Berge knots. In this talk I will aim to answer this question and discuss how this relates to the Berge conjecture and future work. Outline Introduction Dehn Surgery Definition Example Lens Spaces and the Berge conjecture Lens Spaces Berge Knots Martelli and Petronio Baker Families of Berge Knots I A closed tubular neighbourhood N of L. I a specifed simple closed curve J in @N. Then we can construct the 3-manifold: ◦ [ M = (S3 − N) N h ◦ where N denotes the interior of N, and h is a homeomorphism which takes the meridian, µ, of N to the specifed J. -

Dehn Surgery on Knots of Wrapping Number 2
Dehn surgery on knots of wrapping number 2 Ying-Qing Wu Abstract Suppose K is a hyperbolic knot in a solid torus V intersecting a meridian disk D twice. We will show that if K is not the Whitehead knot and the frontier of a regular neighborhood of K ∪ D is incom- pressible in the knot exterior, then K admits at most one exceptional surgery, which must be toroidal. Embedding V in S3 gives infinitely many knots Kn with a slope rn corresponding to a slope r of K in V . If r surgery on K in V is toroidal then either Kn(rn) are toroidal for all but at most three n, or they are all atoroidal and nonhyperbolic. These will be used to classify exceptional surgeries on wrapped Mon- tesinos knots in solid torus, obtained by connecting the top endpoints of a Montesinos tangle to the bottom endpoints by two arcs wrapping around the solid torus. 1 Introduction A Dehn surgery on a hyperbolic knot K in a compact 3-manifold is excep- tional if the surgered manifold is non-hyperbolic. When the manifold is a solid torus, the surgery is exceptional if and only if the surgered manifold is either a solid torus, reducible, toroidal, or a small Seifert fibered manifold whose orbifold is a disk with two cone points. Solid torus surgeries have been classified by Berge [Be] and Gabai [Ga1, Ga2], and by Scharlemann [Sch] there is no reducible surgery. For toroidal surgery, Gordon and Luecke [GL2] showed that the surgery slope must be either an integral or a half integral slope. -

2019 NFCA Texas High School Leadoff Classic Main Bracket Results
2019 NFCA Texas High School Leadoff Classic Main Bracket Results Bryan College Station BHS CSHS 1 Bryan College Station 17 Thu 3pm Thu 3pm Cedar Creek BHS CSHS EP Eastlake SA Brandeis 49 Brandeis College Station 57 Cy Woods 1 BHS Thu 5pm Thu 5pm CSHS 2 18 Thu 1pm Brandeis Robinson Thu 1pm EP Montwood BHS CSHS Robinson 11 Huntsville 3 89 Klein Splendora 93 Splendora 9 BHS Fri 2pm Fri 2pm CSHS 3 Fredericksburg Splendora 19 Thu 9am Thu 9am Fredericksburg 6 VET1 VET2 Belton 6 Grapevine 50 58 Richmond Foster 11 BHS Thu 5pm Klein Splendora Thu 5pm CSHS 4 20 Thu 11am Klein Richmond Foster Thu 11am Klein 11 BHS CSHS Rockwall 2 SA Southwest 9 97 SA Southwest Cedar Ridge 99 Cy Ranch 7 VET1 Fri 4pm Fri 4pm CP3 5 Southwest Cy Ranch 21 Thu 11am Thu 1pm Temple 5 VET1 CP3 Plano East 5 Clear Springs 2 51 Southwest Alvin 59 Alvin VET1 Thu 3pm Thu 5pm CP3 6 22 Thu 9am Vandegrift Alvin Thu 3pm Vandegrift 5 BHS CSHS Lufkin San Marcos 5 90 94 Flower Mound 0 VET2 Fri 12pm Southwest Cedar Ridge Fri 12pm CP4 7 San Marcos Cedar Ridge 23 Thu 9am Thu 1pm Magnolia West 3 VET2 CHAMPIONSHIP CP4 RR Cedar Ridge 12 McKinney Boyd 3 52 Game 192 60 SA Johnson VET2 Thu 3pm San Marcos BHS Cedar Ridge Thu 5 pm CP4 8 4:00 PM 24 Thu 11am M. Boyd BHS 5 10 BHS Johnson Thu 3pm Manvel 0 129 Southwest vs. Cedar Ridge 130 Kingwood Park Bellaire 3 Sat 10am Sat 8am Deer Park VET4 BRAC-BB 9 Cedar Park Deer Park 25 Thu 11am Thu 1pm Cedar Park 5 VET4 BRAC-BB Leander Clements 13 53 Cedar Park MacArthur 61 SA MacArthur VET4 Thu 3pm Thu 5pm BRAC-BB 10 26 Thu 9am Clements MacArthur Thu 3pm Waco University 0 BHS CSHS Tomball Memorial Cy Fair 4 91 Friendswood Woodlands 95 Woodlands 2 VET5 Fri 8am Fri 8am BRAC-YS 11 San Benito Woodlands 27 Thu 11am Thu 1pm San Benito 10 VET5 BRAC-YS SA Holmes 1 Friendswood 10 54 62 Santa Fe VET5 Thu 3pm Friendswood Woodlands Thu 5pm BRAC-YS 12 28 Thu 9am Friendswood Santa Fe Thu 3pm Henderson 0 VET1 VET2 Lake Travis Ridge Point 16 98 100 B. -

Classification Made Easy Class 1
Classification Made Easy Class 1 (CP1) The most severely disabled athletes belong to this classification. These athletes are dependent on a power wheelchair or assistance for mobility. They have severe limitation in both the arms and the legs and have very poor trunk control. Sports Available: • Race Runner (RR1) – using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 1 (BC1) – players who fit into this category can throw the ball onto the court or a CP2 Lower who chooses to push the ball with the foot. Each BC1 athlete has a sport assistant on court with them. o Boccia Class 3 (BC3) – players who fit into this category cannot throw the ball onto the court and have no sustained grasp or release action. They will use a “chute” or “ramp” with the help from their sport assistant to propel the ball. They may use head or arm pointers to hold and release the ball. Players with a impairment of a non cerebral origin, severely affecting all four limbs, are included in this class. Class 2 (CP2) These athletes have poor strength or control all limbs but are able to propel a wheelchair. Some Class 2 athletes can walk but can never run functionally. The class 2 athletes can throw a ball but demonstrates poor grasp and release. Sports Available: • Race Runner (RR2) - using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 2 (BC2) – players can throw the ball into the court consistently and do not need on court assistance.