Four-Manifolds up to Connected Sum with Complex Projective Planes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Descartes, Euler, Poincaré, Pólya and Polyhedra Séminaire De Philosophie Et Mathématiques, 1982, Fascicule 8 « Descartes, Euler, Poincaré, Polya and Polyhedra », , P
Séminaire de philosophie et mathématiques PETER HILTON JEAN PEDERSEN Descartes, Euler, Poincaré, Pólya and Polyhedra Séminaire de Philosophie et Mathématiques, 1982, fascicule 8 « Descartes, Euler, Poincaré, Polya and Polyhedra », , p. 1-17 <http://www.numdam.org/item?id=SPHM_1982___8_A1_0> © École normale supérieure – IREM Paris Nord – École centrale des arts et manufactures, 1982, tous droits réservés. L’accès aux archives de la série « Séminaire de philosophie et mathématiques » implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ - 1 - DESCARTES, EULER, POINCARÉ, PÓLYA—AND POLYHEDRA by Peter H i l t o n and Jean P e d e rs e n 1. Introduction When geometers talk of polyhedra, they restrict themselves to configurations, made up of vertices. edqes and faces, embedded in three-dimensional Euclidean space. Indeed. their polyhedra are always homeomorphic to thè two- dimensional sphere S1. Here we adopt thè topologists* terminology, wherein dimension is a topological invariant, intrinsic to thè configuration. and not a property of thè ambient space in which thè configuration is located. Thus S 2 is thè surface of thè 3-dimensional ball; and so we find. among thè geometers' polyhedra. thè five Platonic “solids”, together with many other examples. However. we should emphasize that we do not here think of a Platonic “solid” as a solid : we have in mind thè bounding surface of thè solid. -
Disability Classification System
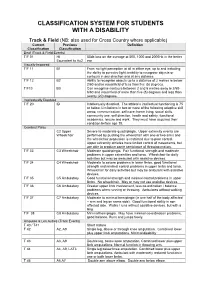
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -

Euler Characteristics, Gauss-Bonnett, and Index Theorems
EULER CHARACTERISTICS,GAUSS-BONNETT, AND INDEX THEOREMS Keefe Mitman and Matthew Lerner-Brecher Department of Mathematics; Columbia University; New York, NY 10027; UN3952, Song Yu. Keywords Euler Characteristics, Gauss-Bonnett, Index Theorems. Contents 1 Foreword 1 2 Euler Characteristics 2 2.1 Introduction . 2 2.2 Betti Numbers . 2 2.2.1 Chains and Boundary Operators . 2 2.2.2 Cycles and Homology . 3 2.3 Euler Characteristics . 4 3 Gauss-Bonnet Theorem 4 3.1 Background . 4 3.2 Examples . 5 4 Index Theorems 6 4.1 The Differential of a Manifold Map . 7 4.2 Degree and Index of a Manifold Map . 7 4.2.1 Technical Definition . 7 4.2.2 A More Concrete Case . 8 4.3 The Poincare-Hopf Theorem and Applications . 8 1 Foreword Within this course thus far, we have become rather familiar with introductory differential geometry, complexes, and certain applications of complexes. Unfortunately, however, many of the geometries we have been discussing remain MARCH 8, 2019 fairly arbitrary and, so far, unrelated, despite their underlying and inherent similarities. As a result of this discussion, we hope to unearth some of these relations and make the ties between complexes in applied topology more apparent. 2 Euler Characteristics 2.1 Introduction In mathematics we often find ourselves concerned with the simple task of counting; e.g., cardinality, dimension, etcetera. As one might expect, with differential geometry the story is no different. 2.2 Betti Numbers 2.2.1 Chains and Boundary Operators Within differential geometry, we count using quantities known as Betti numbers, which can easily be related to the number of n-simplexes in a complex, as we will see in the subsequent discussion. -

0.1 Euler Characteristic
0.1 Euler Characteristic Definition 0.1.1. Let X be a finite CW complex of dimension n and denote by ci the number of i-cells of X. The Euler characteristic of X is defined as: n X i χ(X) = (−1) · ci: (0.1.1) i=0 It is natural to question whether or not the Euler characteristic depends on the cell structure chosen for the space X. As we will see below, this is not the case. For this, it suffices to show that the Euler characteristic depends only on the cellular homology of the space X. Indeed, cellular homology is isomorphic to singular homology, and the latter is independent of the cell structure on X. Recall that if G is a finitely generated abelian group, then G decomposes into a free part and a torsion part, i.e., r G ' Z × Zn1 × · · · Znk : The integer r := rk(G) is the rank of G. The rank is additive in short exact sequences of finitely generated abelian groups. Theorem 0.1.2. The Euler characteristic can be computed as: n X i χ(X) = (−1) · bi(X) (0.1.2) i=0 with bi(X) := rk Hi(X) the i-th Betti number of X. In particular, χ(X) is independent of the chosen cell structure on X. Proof. We use the following notation: Bi = Image(di+1), Zi = ker(di), and Hi = Zi=Bi. Consider a (finite) chain complex of finitely generated abelian groups and the short exact sequences defining homology: dn+1 dn d2 d1 d0 0 / Cn / ::: / C1 / C0 / 0 ι di 0 / Zi / Ci / / Bi−1 / 0 di+1 q 0 / Bi / Zi / Hi / 0 The additivity of rank yields that ci := rk(Ci) = rk(Zi) + rk(Bi−1) and rk(Zi) = rk(Bi) + rk(Hi): Substitute the second equality into the first, multiply the resulting equality by (−1)i, and Pn i sum over i to get that χ(X) = i=0(−1) · rk(Hi). -

Natural Cadmium Is Made up of a Number of Isotopes with Different Abundances: Cd106 (1.25%), Cd110 (12.49%), Cd111 (12.8%), Cd
CLASSROOM Natural cadmium is made up of a number of isotopes with different abundances: Cd106 (1.25%), Cd110 (12.49%), Cd111 (12.8%), Cd 112 (24.13%), Cd113 (12.22%), Cd114(28.73%), Cd116 (7.49%). Of these Cd113 is the main neutron absorber; it has an absorption cross section of 2065 barns for thermal neutrons (a barn is equal to 10–24 sq.cm), and the cross section is a measure of the extent of reaction. When Cd113 absorbs a neutron, it forms Cd114 with a prompt release of γ radiation. There is not much energy release in this reaction. Cd114 can again absorb a neutron to form Cd115, but the cross section for this reaction is very small. Cd115 is a β-emitter C V Sundaram, National (with a half-life of 53hrs) and gets transformed to Indium-115 Institute of Advanced Studies, Indian Institute of Science which is a stable isotope. In none of these cases is there any large Campus, Bangalore 560 012, release of energy, nor is there any release of fresh neutrons to India. propagate any chain reaction. Vishwambhar Pati The Möbius Strip Indian Statistical Institute Bangalore 560059, India The Möbius strip is easy enough to construct. Just take a strip of paper and glue its ends after giving it a twist, as shown in Figure 1a. As you might have gathered from popular accounts, this surface, which we shall call M, has no inside or outside. If you started painting one “side” red and the other “side” blue, you would come to a point where blue and red bump into each other. -

2019 NFCA Texas High School Leadoff Classic Main Bracket Results
2019 NFCA Texas High School Leadoff Classic Main Bracket Results Bryan College Station BHS CSHS 1 Bryan College Station 17 Thu 3pm Thu 3pm Cedar Creek BHS CSHS EP Eastlake SA Brandeis 49 Brandeis College Station 57 Cy Woods 1 BHS Thu 5pm Thu 5pm CSHS 2 18 Thu 1pm Brandeis Robinson Thu 1pm EP Montwood BHS CSHS Robinson 11 Huntsville 3 89 Klein Splendora 93 Splendora 9 BHS Fri 2pm Fri 2pm CSHS 3 Fredericksburg Splendora 19 Thu 9am Thu 9am Fredericksburg 6 VET1 VET2 Belton 6 Grapevine 50 58 Richmond Foster 11 BHS Thu 5pm Klein Splendora Thu 5pm CSHS 4 20 Thu 11am Klein Richmond Foster Thu 11am Klein 11 BHS CSHS Rockwall 2 SA Southwest 9 97 SA Southwest Cedar Ridge 99 Cy Ranch 7 VET1 Fri 4pm Fri 4pm CP3 5 Southwest Cy Ranch 21 Thu 11am Thu 1pm Temple 5 VET1 CP3 Plano East 5 Clear Springs 2 51 Southwest Alvin 59 Alvin VET1 Thu 3pm Thu 5pm CP3 6 22 Thu 9am Vandegrift Alvin Thu 3pm Vandegrift 5 BHS CSHS Lufkin San Marcos 5 90 94 Flower Mound 0 VET2 Fri 12pm Southwest Cedar Ridge Fri 12pm CP4 7 San Marcos Cedar Ridge 23 Thu 9am Thu 1pm Magnolia West 3 VET2 CHAMPIONSHIP CP4 RR Cedar Ridge 12 McKinney Boyd 3 52 Game 192 60 SA Johnson VET2 Thu 3pm San Marcos BHS Cedar Ridge Thu 5 pm CP4 8 4:00 PM 24 Thu 11am M. Boyd BHS 5 10 BHS Johnson Thu 3pm Manvel 0 129 Southwest vs. Cedar Ridge 130 Kingwood Park Bellaire 3 Sat 10am Sat 8am Deer Park VET4 BRAC-BB 9 Cedar Park Deer Park 25 Thu 11am Thu 1pm Cedar Park 5 VET4 BRAC-BB Leander Clements 13 53 Cedar Park MacArthur 61 SA MacArthur VET4 Thu 3pm Thu 5pm BRAC-BB 10 26 Thu 9am Clements MacArthur Thu 3pm Waco University 0 BHS CSHS Tomball Memorial Cy Fair 4 91 Friendswood Woodlands 95 Woodlands 2 VET5 Fri 8am Fri 8am BRAC-YS 11 San Benito Woodlands 27 Thu 11am Thu 1pm San Benito 10 VET5 BRAC-YS SA Holmes 1 Friendswood 10 54 62 Santa Fe VET5 Thu 3pm Friendswood Woodlands Thu 5pm BRAC-YS 12 28 Thu 9am Friendswood Santa Fe Thu 3pm Henderson 0 VET1 VET2 Lake Travis Ridge Point 16 98 100 B. -

Classification Made Easy Class 1
Classification Made Easy Class 1 (CP1) The most severely disabled athletes belong to this classification. These athletes are dependent on a power wheelchair or assistance for mobility. They have severe limitation in both the arms and the legs and have very poor trunk control. Sports Available: • Race Runner (RR1) – using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 1 (BC1) – players who fit into this category can throw the ball onto the court or a CP2 Lower who chooses to push the ball with the foot. Each BC1 athlete has a sport assistant on court with them. o Boccia Class 3 (BC3) – players who fit into this category cannot throw the ball onto the court and have no sustained grasp or release action. They will use a “chute” or “ramp” with the help from their sport assistant to propel the ball. They may use head or arm pointers to hold and release the ball. Players with a impairment of a non cerebral origin, severely affecting all four limbs, are included in this class. Class 2 (CP2) These athletes have poor strength or control all limbs but are able to propel a wheelchair. Some Class 2 athletes can walk but can never run functionally. The class 2 athletes can throw a ball but demonstrates poor grasp and release. Sports Available: • Race Runner (RR2) - using the Race Runner frame to run, track events include 100m, 200m and 400m. • Boccia o Boccia Class 2 (BC2) – players can throw the ball into the court consistently and do not need on court assistance. -

Recognizing Surfaces
RECOGNIZING SURFACES Ivo Nikolov and Alexandru I. Suciu Mathematics Department College of Arts and Sciences Northeastern University Abstract The subject of this poster is the interplay between the topology and the combinatorics of surfaces. The main problem of Topology is to classify spaces up to continuous deformations, known as homeomorphisms. Under certain conditions, topological invariants that capture qualitative and quantitative properties of spaces lead to the enumeration of homeomorphism types. Surfaces are some of the simplest, yet most interesting topological objects. The poster focuses on the main topological invariants of two-dimensional manifolds—orientability, number of boundary components, genus, and Euler characteristic—and how these invariants solve the classification problem for compact surfaces. The poster introduces a Java applet that was written in Fall, 1998 as a class project for a Topology I course. It implements an algorithm that determines the homeomorphism type of a closed surface from a combinatorial description as a polygon with edges identified in pairs. The input for the applet is a string of integers, encoding the edge identifications. The output of the applet consists of three topological invariants that completely classify the resulting surface. Topology of Surfaces Topology is the abstraction of certain geometrical ideas, such as continuity and closeness. Roughly speaking, topol- ogy is the exploration of manifolds, and of the properties that remain invariant under continuous, invertible transforma- tions, known as homeomorphisms. The basic problem is to classify manifolds according to homeomorphism type. In higher dimensions, this is an impossible task, but, in low di- mensions, it can be done. Surfaces are some of the simplest, yet most interesting topological objects. -

Higher Euler Characteristics: Variations on a Theme of Euler
HIGHER EULER CHARACTERISTICS: VARIATIONS ON A THEME OF EULER NIRANJAN RAMACHANDRAN ABSTRACT. We provide a natural interpretation of the secondary Euler characteristic and gener- alize it to higher Euler characteristics. For a compact oriented manifold of odd dimension, the secondary Euler characteristic recovers the Kervaire semi-characteristic. We prove basic properties of the higher invariants and illustrate their use. We also introduce their motivic variants. Being trivial is our most dreaded pitfall. “Trivial” is relative. Anything grasped as long as two minutes ago seems trivial to a working mathematician. M. Gromov, A few recollections, 2011. The characteristic introduced by L. Euler [7,8,9], (first mentioned in a letter to C. Goldbach dated 14 November 1750) via his celebrated formula V − E + F = 2; is a basic ubiquitous invariant of topological spaces; two extracts from the letter: ...Folgende Proposition aber kann ich nicht recht rigorose demonstriren ··· H + S = A + 2: ...Es nimmt mich Wunder, dass diese allgemeinen proprietates in der Stereome- trie noch von Niemand, so viel mir bekannt, sind angemerkt worden; doch viel mehr aber, dass die furnehmsten¨ davon als theor. 6 et theor. 11 so schwer zu beweisen sind, den ich kann dieselben noch nicht so beweisen, dass ich damit zufrieden bin.... When the Euler characteristic vanishes, other invariants are necessary to study topological spaces. For instance, an odd-dimensional compact oriented manifold has vanishing Euler characteristic; the semi-characteristic of M. Kervaire [16] provides an important invariant of such manifolds. In recent years, the ”secondary” or ”derived” Euler characteristic has made its appearance in many disparate fields [2, 10, 14,4,5, 18,3]; in fact, this secondary invariant dates back to 1848 when it was introduced by A. -

An Advanced System of the Mitochondrial Processing Peptidase and Core Protein Family in Trypanosoma Brucei and Multiple Origins of the Core I Subunit in Eukaryotes
GBE An Advanced System of the Mitochondrial Processing Peptidase and Core Protein Family in Trypanosoma brucei and Multiple Origins of the Core I Subunit in Eukaryotes Jan Mach1, Pavel Poliak2,3,AnnaMatusˇkova´ 4,Vojteˇch Zˇa´rsky´1,Jirˇı´ Janata4, Julius Lukesˇ2,3,and Jan Tachezy1,* 1Department of Parasitology, Faculty of Science, Charles University, Prague, Czech Republic 2Institute of Parasitology, Biology Centre, Czech Academy of Sciences, Prague, Czech Republic 3Faculty of Science, University of South Bohemia, Cˇ eske´ Budeˇjovice, Budweis, Czech Republic 4Institute of Microbiology, Czech Academy of Sciences, Prague, Czech Republic *Corresponding author: E-mail: [email protected]. Accepted: April 2, 2013 Abstract Mitochondrial processing peptidase (MPP) consists of a and b subunits that catalyze the cleavage of N-terminal mitochondrial- targeting sequences (N-MTSs) and deliver preproteins to the mitochondria. In plants, both MPP subunits are associated with the respiratory complex bc1, which has been proposed to represent an ancestral form. Subsequent duplication of MPP subunits resulted in separate sets of genes encoding soluble MPP in the matrix and core proteins (cp1 and cp2) of the membrane-embedded bc1 complex. As only a-MPP was duplicated in Neurospora,itssingleb–MPP functions in both MPP and bc1 complexes. Herein, we investigated the MPP/core protein family and N-MTSs in the kinetoplastid Trypanosoma brucei, which is often considered one of the most ancient eukaryotes. Analysis of N-MTSs predicted in 336 mitochondrial proteins showed that trypanosomal N-MTSs were comparable with N-MTSs from other organisms. N-MTS cleavage is mediated by a standard heterodimeric MPP, which is present in the matrix of procyclic and bloodstream trypanosomes, and its expression is essential for the parasite. -

Technology Enhancement and Ethics in the Paralympic Games
UNIVERSITY OF PELOPONNESE FACULTY OF HUMAN MOVEMENT AND QUALITY OF LIFE SCIENCES DEPARTMENT OF SPORTS ORGANIZATION AND MANAGEMENT MASTER’S THESIS “OLYMPIC STUDIES, OLYMPIC EDUCATION, ORGANIZATION AND MANAGEMENT OF OLYMPIC EVENTS” Technology Enhancement and Ethics In the Paralympic Games Stavroula Bourna Sparta 2016 i TECHNOLOGY ENHANCEMENT AND ETHICS IN THE PARALYMPIC GAMES By Stavroula Bourna MASTER Thesis submitted to the professorial body for the partial fulfillment of obligations for the awarding of a post-graduate title in the Post-graduate Programme, "Organization and Management of Olympic Events" of the University of the Peloponnese, in the branch "Olympic Education" Sparta 2016 Approved by the Professor body: 1st Supervisor: Konstantinos Georgiadis Prof. UNIVERSITY OF PELOPONNESE, GREECE 2nd Supervisor: Konstantinos Mountakis Prof. UNIVERSITY OF PELOPONNESE, GREECE 3rd Supervisor: Paraskevi Lioumpi, Prof., GREECE ii Copyright © Stavroula Bourna, 2016 All rights reserved. The copying, storage and forwarding of the present work, either complete or in part, for commercial profit, is forbidden. The copying, storage and forwarding for non profit-making, educational or research purposes is allowed under the condition that the source of this information must be mentioned and the present stipulations be adhered to. Requests concerning the use of this work for profit-making purposes must be addressed to the author. The views and conclusions expressed in the present work are those of the writer and should not be interpreted as representing the official views of the Department of Sports’ Organization and Management of the University of the Peloponnese. iii ABSTRACT Stavroula Bourna: Technology Enhancement and Ethics in the Paralympic Games (Under the supervision of Konstantinos Georgiadis, Professor) The aim of the present thesis is to present how the new technological advances can affect the performance of the athletes in the Paralympic Games. -

Generalized CP Symmetries and Special Regions of Parameter Space in the Two-Higgs-Doublet Model
PHYSICAL REVIEW D 79, 116004 (2009) Generalized CP symmetries and special regions of parameter space in the two-Higgs-doublet model P.M. Ferreira,1,2 Howard E. Haber,3 and Joa˜o P. Silva1,4 1Instituto Superior de Engenharia de Lisboa, Rua Conselheiro Emı´dio Navarro, 1900 Lisboa, Portugal 2Centro de Fı´sica Teo´rica e Computacional, Faculdade de Cieˆncias, Universidade de Lisboa, Av. Prof. Gama Pinto 2, 1649-003 Lisboa, Portugal 3Santa Cruz Institute for Particle Physics, University of California, Santa Cruz, California 95064, USA 4Centro de Fı´sica Teo´rica de Partı´culas, Instituto Superior Te´cnico, P-1049-001 Lisboa, Portugal (Received 27 March 2009; published 15 June 2009) We consider the impact of imposing generalized CP symmetries on the Higgs sector of the two-Higgs- doublet model, and identify three classes of symmetries. Two of these classes constrain the scalar potential parameters to an exceptional region of parameter space, which respects either a Z2 discrete flavor symmetry or a Uð1Þ symmetry. We exhibit a basis-invariant quantity that distinguishes between these two possible symmetries. We also show that the consequences of imposing these two classes of CP symmetry can be achieved by combining Higgs family symmetries, and that this is not possible for the usual CP symmetry. We comment on the vacuum structure and on renormalization in the presence of these symmetries. Finally, we demonstrate that the standard CP symmetry can be used to build all the models we identify, including those based on Higgs family symmetries. DOI: 10.1103/PhysRevD.79.116004 PACS numbers: 11.30.Er, 11.30.Ly, 12.60.Fr, 14.80.Cp metry.