(Sav) Conceptual Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sab 2012 Mecbpn
Dos-Santos,W.A., et al. PROPOSTA DE UMA MISSÃO ESPACIAL PARA PICOSATÉLITES E ... PROPOSTA DE UMA MISSÃO ESPACIAL COMPLETA PARA PICOSATÉLITES E NANOSATÉLITES UTILIZANDO LANÇADORES NACIONAIS Walter Abrahão dos Santos, Fernanda Sayuri Yamasaki, Wilson Yamaguti Instituto Nacional de Pesquisas Espaciais – Av. dos Astronautas,1758 - CP515 - CEP 12227-010 São José dos Campos - SP, [email protected] , [email protected] , [email protected] Flávio de Azevedo Corrêa Jr. Instituto de Aeronáutica e Espaço – DCTA/IAE/SESP/PE, Praça Mal. Eduardo Gomes, 50 - Vila das Acácias, 12.228-904 - São José dos Campos - SP - Brasil - [email protected] Resumo: Devido ao mercado emergente de aplicações para pico e nanosatélites nas áreas de Espaço e Defesa, este trabalho se inspira na Missão Espacial Completa Brasileira (MECB), um programa conjunto de satélites e lançadores brasileiros, para propor um programa indutor de lançadores e plataformas voltados para satélites miniaturizados com missões sofisticadas devido a avanços em nanotecnologia e computação, entre outros. O trabalho considera dois grandes segmentos: (1) o segmento de lançadores focado na análise de viabilidade de veículos lançadores de pequenas cargas a uma altitude de aproximadamente 300 km e (2) o segmento relativo aos satélites objetivando embarcar cargas úteis com as seguintes aplicações em vista: um radiômetro, uma microcâmera e formação em voo. A análise foi basicamente concentrada nos envelopes de massa, tamanho, potência. A sustentabilidade do programa para estes satélites requer um acesso barato e regular ao espaço e é atrativa pela projeção futura deste nicho de mercado que pode contribuir com objetivos estratégicos do país. -

The Flight to Orbit
There are numerous ways to get there— Around the Corner Th As then–US Space Command chief from rocket The Gen. Howell M. Estes III said to launch to space defense writers just before his re- tirement in August, “This is going maneuver to come along a lot quicker than we vehicles—and the think it is. ... We tend to think this stuff is way out there in the future, Air Force is but it’s right around the corner.” keeping its Flight The Air Force and NASA have divided the task of providing the options open. US government with a means of reliable, low-cost transportation to Earth orbit. The Air Force, with the largest immediate need, is heading to up the effort to revamp the Expend- to able Launch Vehicles now used to loft military and other government satellites. Called the Evolved ELV, this program is focused on derivatives of existing rockets. Competitors have been invited to redesign or value- engineer their proven boosters with new materials and technologies to provide reliable launch services at a he Air Force would like to go Orbit far lower price than today’s bench- back and forth to Earth orbit as bit mark of around $10,000 a pound to T O easily as it goes back and forth to Low Earth Orbit. The reasoning is 30,000 feet—routinely, reliably, and that an “evolved”—rather than an relatively cheaply. Such a capability all-new—vehicle will yield cost sav- goes hand in hand with being a true ings while reducing technical risk. -

China's Aircraft Carrier Ambitions
CHINA’S AIRCRAFT CARRIER AMBITIONS An Update Nan Li and Christopher Weuve his article will address two major analytical questions. First, what are the T necessary and suffi cient conditions for China to acquire aircraft carriers? Second, what are the major implications if China does acquire aircraft carriers? Existing analyses on China’s aircraft carrier ambitions are quite insightful but also somewhat inadequate and must therefore be updated. Some, for instance, argue that with the advent of the Taiwan issue as China’s top threat priority by late 1996 and the retirement of Liu Huaqing as vice chair of China’s Central Military Commission (CMC) in 1997, aircraft carriers are no longer considered vital.1 In that view, China does not require aircraft carriers to capture sea and air superiority in a war over Taiwan, and China’s most powerful carrier proponent (Liu) can no longer infl uence relevant decision making. Other scholars suggest that China may well acquire small-deck aviation platforms, such as helicopter carriers, to fulfi ll secondary security missions. These missions include naval di- plomacy, humanitarian assistance, disaster relief, and antisubmarine warfare.2 The present authors conclude, however, that China’s aircraft carrier ambitions may be larger than the current literature has predicted. Moreover, the major implications of China’s acquiring aircraft carriers may need to be explored more carefully in order to inform appropriate reactions on the part of the United States and other Asia-Pacifi c naval powers. This article updates major changes in the four major conditions that are necessary and would be largely suffi cient for China to acquire aircraft carriers: leadership endorsement, fi nancial affordability, a relatively concise naval strat- egy that defi nes the missions of carrier operations, and availability of requisite 14 NAVAL WAR COLLEGE REVIEW technologies. -

The SKYLON Spaceplane
The SKYLON Spaceplane Borg K.⇤ and Matula E.⇤ University of Colorado, Boulder, CO, 80309, USA This report outlines the major technical aspects of the SKYLON spaceplane as a final project for the ASEN 5053 class. The SKYLON spaceplane is designed as a single stage to orbit vehicle capable of lifting 15 mT to LEO from a 5.5 km runway and returning to land at the same location. It is powered by a unique engine design that combines an air- breathing and rocket mode into a single engine. This is achieved through the use of a novel lightweight heat exchanger that has been demonstrated on a reduced scale. The program has received funding from the UK government and ESA to build a full scale prototype of the engine as it’s next step. The project is technically feasible but will need to overcome some manufacturing issues and high start-up costs. This report is not intended for publication or commercial use. Nomenclature SSTO Single Stage To Orbit REL Reaction Engines Ltd UK United Kingdom LEO Low Earth Orbit SABRE Synergetic Air-Breathing Rocket Engine SOMA SKYLON Orbital Maneuvering Assembly HOTOL Horizontal Take-O↵and Landing NASP National Aerospace Program GT OW Gross Take-O↵Weight MECO Main Engine Cut-O↵ LACE Liquid Air Cooled Engine RCS Reaction Control System MLI Multi-Layer Insulation mT Tonne I. Introduction The SKYLON spaceplane is a single stage to orbit concept vehicle being developed by Reaction Engines Ltd in the United Kingdom. It is designed to take o↵and land on a runway delivering 15 mT of payload into LEO, in the current D-1 configuration. -

Commercial Space Transportation Developments and Concepts: Vehicles, Technologies and Spaceports
Commercial Space Transportation 2006 Commercial Space Transportation Developments and Concepts: Vehicles, Technologies and Spaceports January 2006 HQ003606.INDD 2006 U.S. Commercial Space Transportation Developments and Concepts About FAA/AST About the Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA/AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 49 United States Code, Subtitle IX, Chapter 701 (formerly the Commercial Space Launch Act). FAA/AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA/AST is directed to encour- age, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA/AST’s web site at http://ast.faa.gov. Federal Aviation Administration Office of Commercial Space Transportation i About FAA/AST 2006 U.S. Commercial Space Transportation Developments and Concepts NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. ii Federal Aviation Administration Office of Commercial Space Transportation 2006 U.S. Commercial Space Transportation Developments and Concepts Contents Table of Contents Introduction . .1 Significant 2005 Events . .4 Space Competitions . .6 Expendable Launch Vehicles . .9 Current Expendable Launch Vehicle Systems . .9 Atlas 5 - Lockheed Martin Corporation . -

Future Space Launch Vehicles
Future Space Launch Vehicles S. Krishnan Professor of Aerospace Engineering Indian Institute of Technology Madras Chennnai - 600 036, India (Written in 2001) Introduction Space technology plays a very substantial role in the economical growth and the national security needs of any country. Communications, remote sensing, weather forecasting, navigation, tracking and data relay, surveillance, reconnaissance, and early warning and missile defence are its dependent user-technologies. Undoubtedly, space technology has become the backbone of global information highway. In this technology, the two most important sub-technologies correspond to spacecraft and space launch vehicles. Spacecraft The term spacecraft is a general one. While the spacecraft that undertakes a deep space mission bears this general terminology, the one that orbits around a planet is also a spacecraft but called specifically a satellite more strictly an artificial satellite, moons around their planets being natural satellites. Cassini is an example for a spacecraft. This was developed under a cooperative project of NASA, the European Space Agency, and the Italian Space Agency. Cassini spacecraft, launched in 1997, is continuing its journey to Saturn (about 1274 million km away from Earth), where it is scheduled to begin in July 2004, a four- year exploration of Saturn, its rings, atmosphere, and moons (18 in number). Cassini executed two gravity-assist flybys (or swingbys) of Venus one in April 1998 and one in June 1999 then a flyby of Earth in August 1999, and a flyby of Jupiter (about 629 million km away) in December 2000, see Fig. 1. We may note here with interest that ISRO (Indian Space Research Organisation) is thinking of a flyby mission of a spacecraft around Moon (about 0.38 million km away) by using its launch vehicle PSLV. -

Off Airport Ops Guide
Off Airport Ops Guide TECHNIQUES FOR OFF AIRPORT OPERATIONS weight and balance limitations for your aircraft. Always file a flight plan detailing the specific locations you intend Note: This document suggests techniques and proce- to explore. Make at least 3 recon passes at different levels dures to improve the safety of off-airport operations. before attempting a landing and don’t land unless you’re It assumes that pilots have received training on those sure you have enough room to take off. techniques and procedures and is not meant to replace instruction from a qualified and experienced flight instruc- High Level: Circle the area from different directions to de- tor. termine the best possible landing site in the vicinity. Check the wind direction and speed using pools of water, drift General Considerations: Off-airport operations can be of the plane, branches, grass, dust, etc. Observe the land- extremely rewarding; transporting people and gear to lo- ing approach and departure zone for obstructions such as cations that would be difficult or impossible to reach in trees or high terrain. any other way. Operating off-airport requires high perfor- mance from pilot and aircraft and acquiring the knowledge Intermediate: Level: Make a pass in both directions along and experience to conduct these operations safely takes either side of the runway to check for obstructions and time. Learning and practicing off-airport techniques under runway length. Check for rock size. Note the location of the supervision of an experienced flight instructor will not the touchdown area and roll-out area. Associate land- only make you safer, but also save you time and expense. -

The Space Race Continues
The Space Race Continues The Evolution of Space Tourism from Novelty to Opportunity Matthew D. Melville, Vice President Shira Amrany, Consulting and Valuation Analyst HVS GLOBAL HOSPITALITY SERVICES 369 Willis Avenue Mineola, NY 11501 USA Tel: +1 516 248-8828 Fax: +1 516 742-3059 June 2009 NORTH AMERICA - Atlanta | Boston | Boulder | Chicago | Dallas | Denver | Mexico City | Miami | New York | Newport, RI | San Francisco | Toronto | Vancouver | Washington, D.C. | EUROPE - Athens | London | Madrid | Moscow | ASIA - 1 Beijing | Hong Kong | Mumbai | New Delhi | Shanghai | Singapore | SOUTH AMERICA - Buenos Aires | São Paulo | MIDDLE EAST - Dubai HVS Global Hospitality Services The Space Race Continues At a space business forum in June 2008, Dr. George C. Nield, Associate Administrator for Commercial Space Transportation at the Federal Aviation Administration (FAA), addressed the future of commercial space travel: “There is tangible work underway by a number of companies aiming for space, partly because of their dreams, but primarily because they are confident it can be done by the private sector and it can be done at a profit.” Indeed, private companies and entrepreneurs are currently aiming to make this dream a reality. While the current economic downturn will likely slow industry progress, space tourism, currently in its infancy, is poised to become a significant part of the hospitality industry. Unlike the space race of the 1950s and 1960s between the United States and the former Soviet Union, the current rivalry is not defined on a national level, but by a collection of first-mover entrepreneurs that are working to define the industry and position it for long- term profitability. -
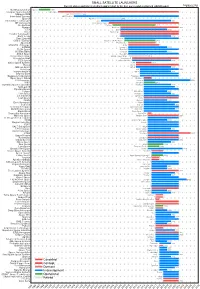
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

Commercial Orbital Transportation Services
National Aeronautics and Space Administration Commercial Orbital Transportation Services A New Era in Spaceflight NASA/SP-2014-617 Commercial Orbital Transportation Services A New Era in Spaceflight On the cover: Background photo: The terminator—the line separating the sunlit side of Earth from the side in darkness—marks the changeover between day and night on the ground. By establishing government-industry partnerships, the Commercial Orbital Transportation Services (COTS) program marked a change from the traditional way NASA had worked. Inset photos, right: The COTS program supported two U.S. companies in their efforts to design and build transportation systems to carry cargo to low-Earth orbit. (Top photo—Credit: SpaceX) SpaceX launched its Falcon 9 rocket on May 22, 2012, from Cape Canaveral, Florida. (Second photo) Three days later, the company successfully completed the mission that sent its Dragon spacecraft to the Station. (Third photo—Credit: NASA/Bill Ingalls) Orbital Sciences Corp. sent its Antares rocket on its test flight on April 21, 2013, from a new launchpad on Virginia’s eastern shore. Later that year, the second Antares lifted off with Orbital’s cargo capsule, (Fourth photo) the Cygnus, that berthed with the ISS on September 29, 2013. Both companies successfully proved the capability to deliver cargo to the International Space Station by U.S. commercial companies and began a new era of spaceflight. ISS photo, center left: Benefiting from the success of the partnerships is the International Space Station, pictured as seen by the last Space Shuttle crew that visited the orbiting laboratory (July 19, 2011). More photos of the ISS are featured on the first pages of each chapter. -

A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner
A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner Andrew S. Hahn 1 NASA Langley Research Center, Hampton, VA, 23681 Most jet airliner conceptual designs adhere to conventional takeoff and landing performance. Given this predominance, takeoff and landing performance has not been critical, since it has not been an active constraint in the design. Given that the demand for air travel is projected to increase dramatically, there is interest in operational concepts, such as Metroplex operations that seek to unload the major hub airports by using underutilized surrounding regional airports, as well as using underutilized runways at the major hub airports. Both of these operations require shorter takeoff and landing performance than is currently available for airliners of approximately 100-passenger capacity. This study examines the issues of modeling performance in this now critical flight regime as well as the impact of progressively reducing takeoff and landing field length requirements on the aircraft’s characteristics. Nomenclature CTOL = conventional takeoff and landing FAA = Federal Aviation Administration FAR = Federal Aviation Regulation RJ = regional jet STOL = short takeoff and landing UCD = three-dimensional Weissinger lifting line aerodynamics program I. Introduction EMAND for air travel over the next fifty to D seventy-five years has been projected to be as high as three times that of today. Given that the major airport hubs are already congested, and that the ability to increase capacity at these airports by building more full- size runways is limited, unconventional solutions are being considered to accommodate the projected increased demand. Two possible solutions being considered are: Metroplex operations, and using existing underutilized runways at the major hub airports. -

Rockets for Education 5 June 2019
Rockets for education 5 June 2019 Technology, Poland. Several modular experiments are held in the circular containers imaged here. Called Hedgehog, the experiment tested patented instruments for measuring acceleration, vibration and heat flow during launch. The team hopes to refine the tools for use on ground-based qualification tests that all payloads must pass before launch. At launch, Rexus produces a peak vertical acceleration of around 17 times the force of gravity. Once the rocket motors shut off, the experiments enter freefall. On the downward arc parachutes deploy, lowering the experiments to the ground for transport back to the launch site by helicopter as quickly as possible. Credit: European Space Agency A service module sends data and receives commands from the ground to keep everything on course while sending videos and data to ground Why rockets are so captivating is not exactly rocket stations. science. Watching a chunk of metal defy the forces of gravity satisfies many a human's wish to soar ESA has used sounding rockets for over 30 years through the air and into space. to investigate phenomena under microgravity from the state-of-the-art facilities are available at Today there are countless rockets to satisfy the Esrange. The laboratories include microscopes, itch, and they are not all big launchers delivering centrifuges and incubators so investigators can heavy satellites into space, like Europe's Ariane 5 prepare and analyse their experiments around and the upcoming Ariane 6. flight. Sounding rockets, like this Rexus (Rocket Coordinated by ESA Education, the Rexus/Bexus Experiments for University Students) being programme launches two sounding rockets a year assembled at the ZARM facilities in Bremen, and provides an experimental near-space platform Germany, are launched regularly in the name of for students who can work on different research science from the Esrange Space Center in areas from atmospheric research and fluid physics, northern Sweden.