Technical Design Report for Via Maris
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Nojivw&Ohn? *Joto Omaj
Dec. 18, 1962 W. R. SLOAN 3,069,681 SYSTEM FOR LARGE-AREA DISPLAY OF TWO-COLOR INFORMATION Filed March la, l960 3 Sheets-Sheet 1. r LIMAS9.NIHO BOHABO ??31=== IWWBO-BNI-NOI.-OL SV78EWIlCJE OMAJ.*JOTOO NOJIVW&JOHN? MABIA9.NI BOV-38ñS [] [] INVENTOR. WILLIAM R. SLOAN BY ????????? ? ???? AT TORNEYS Dec. 18, 1962 W. R, SLOAN 3,069,681 SYSTEM FOR LARGE-AREA DISPLAY OF TWO-COLOR INFORMATION Filed March 14, 1960 3. Sheets-Sheet 2 GN2&#OTOO ea? ?——?? AT TORNEYS Dec. 18, 1962 W. R. SOAN 3,069,681 SYSTEM FOR LARGE-AREA DISPLAY OF TWO-COLOR INFORMATION Filed March 14, 1960 3 Sheets-Sheet 3 – E. T =-4 HORIZONAL ? SWEEP GENERATOR 44 68 256 K.C. GENERATORPULSE ( BSTABLE BSTABLE B|STABLE ? B|STABLE BSTABLE ??? ? ??82 m232 -- 198 lost 3 -- SAS JS JAAYeASeSYe SAuSJSJASJLLLTLTMSTTLTTTLLLSLLSS LL LLL LLLLLL DISPLAY SURFACE HORIZONTAL SWEEP GENERATOR INVENTOR. WLLAM R. SOAN ATTORNEYS 3,069,681 United States Patent Office Patented Dec. 18, 1962 2 3,069,681 when the electrodes are respectively pulsed. Each of the SYSTEM FOR LARGE-AREA DISPLAY OF pluralities of electrodes is in spaced-apart alignment along TWO,-COLOR ENSFORMATION one dimension of the sheet and the two pluralities of William R. Sloan, Fort Wayne, Ind., assignor to Inter electrodes are respectively spaced-apart along the other national Telephone and Telegraph Corporation dimension of the sheet. Means are provided for moving Filed Mar. 14, 1960, Ser. No. 14,743 the sheet with respect to the electrodes along the other 9 Claims. (Cl, 346-74) dimension. First switching means is provided sequen tially coupling the first electrodes to the converting means This invention relates to a system for presenting in for sampling one of the color-responsive signals at dis two colors alpha-numeric information, i.e., words and Crete intervals and for pulsing the first electrodes respon numbers, and graphical information, such as maps, sive to the presence of the one color signal at the respec graphs, etc., visually on a large-area display for group tive intervals. -

Teelllliedi Siteeifieatittil CONTENTS
'. INTERACTIVE GRAPHIC SYSTEMS t;DSn teellllieDI Siteeifieatittil CONTENTS Section Page Section Page 1 Introducing GDS II ........................................... 1-1 4 Specifications ................................................ 4-1 2 General Description .......................................... 2-1 4.1 Database Features ....................................... 4-1 4.2 Input/Editing ............................................ 4-1 2.1 The Problems of VLSI .................................... 2-1 4.3 Display Control .......................................... 4-3 2.2 The Solution - GDS II .................................... 2-1 4.4 Background Programs ................................... 4-4 2.3 Exploiting the Latest Technology .................. , ...... 2-2 4.5 Application Programming Tools .......................... 4-5 4.6 Hardware ............................................... 4-6 3 System Operation ............................................ 3-1 5 Software ..................................................... 5-1 3.1 Database Extensibility ................................... 3-1 3.2 Database Elements ...................................... 3-1 5.1 Multiground RDOS ...................................... 5-1 3.3 Database Construction ................................... 3-2 5.2 Database Management System ........................... 5-3 3.4 Menu Operations ........................................ 3-2 5.3 GPL™ ................................................... 5-7 3.5 Graphic Display ......................................... 3-2 -

Of 38 an Inexpensive VTCT Adapter for All Tektronix Scts Version. 1.04.1
Page 1 of 38 An Inexpensive VTCT Adapter for All Tektronix SCTs Version. 1.04.1 Page 2 of 38 An Inexpensive VTCT Adapter for All Tektronix SCTs Version. 1.04.1 Figure 1 Front cover—Tektronix 577 Semiconductor Curve Tracer displaying the characteristic curves of a TRIODE VACUUM TUBE. Page 3 of 38 An Inexpensive VTCT Adapter for All Tektronix SCTs Version. 1.04.1 AN INEXPENSIVE VACUUM TUBE CURVE TRACER ADAPTER FOR ALL TEKTRONIX SEMICONDUCTOR CURVE TRACERS © Dennis Tillman W7pF, [email protected], Version 1.04.1, Mar. 10, 2020 CONTENTS INTRODUCTION ................................................................................................................................... 5 TEKTRONIX CURVE TRACER FEATURE COMPARISON .................................................................. 6 TEKTRONIX CURVE TRACERS .......................................................................................................... 6 VACUUM TUBE TESTER FEATURE COMPARISON .......................................................................... 8 THEORY OF OPERATION .................................................................................................................. 11 EICO 667 MODIFICATIONS................................................................................................................ 13 WHAT CAN I EXPECT WITH THE CURVE TRACER I MAY ALREADY OWN? ................................ 13 WHAT YOU WILL NEED TO MAKE THIS VTCT ................................................................................ 14 TWO CHARACTERISTIC CURVES -

Frequency Spectrum Generated by Thyristor Control J
Electrocomponent Science and Technology (C) Gordon and Breach Science Publishers Ltd. 1974, Vol. 1, pp. 43-49 Printed in Great Britain FREQUENCY SPECTRUM GENERATED BY THYRISTOR CONTROL J. K. HALL and N. C. JONES Loughborough University of Technology, Loughborough, Leics. U.K. (Received October 30, 1973; in final form December 19, 1973) This paper describes the measured harmonics in the load currents of thyristor circuits and shows that with firing angle control the harmonic amplitudes decrease sharply with increasing harmonic frequency, but that they extend to very high harmonic orders of around 6000. The amplitudes of the harmonics are a maximum for a firing delay angle of around 90 Integral cycle control produces only low order harmonics and sub-harmonics. It is also shown that with firing angle control apparently random inter-harmonic noise is present and that the harmonics fall below this noise level at frequencies of approximately 250 KHz for a switched 50 Hz waveform and for the resistive load used. The noise amplitude decreases with increasing frequency and is a maximum with 90 firing delay. INTRODUCTION inductance. 6,7 Literature on the subject tends to assume that noise is due to the high frequency Thyristors are now widely used for control of power harmonics generated by thyristor switch-on and the in both d.c. and a.c. circuits. The advantages of design of suppression components is based on this. relatively small size, low losses and fast switching This investigation has been performed in order to speeds have contributed to the vast growth in establish the validity of this assumption, since it is application since their introduction, when they were believed that there may be a number of perhaps basically a solid-state replacement for mercury-arc separate sources of noise in thyristor circuits. -

Tabulation of Published Data on Electron Devices of the U.S.S.R. Through December 1976
NAT'L INST. OF STAND ms & TECH R.I.C. Pubii - cations A111D4 4 Tfi 3 4 4 NBSIR 78-1564 Tabulation of Published Data on Electron Devices of the U.S.S.R. Through December 1976 Charles P. Marsden Electron Devices Division Center for Electronics and Electrical Engineering National Bureau of Standards Washington, DC 20234 December 1978 Final QC— U.S. DEPARTMENT OF COMMERCE 100 NATIONAL BUREAU OF STANDARDS U56 73-1564 Buraev of Standard! NBSIR 78-1564 1 4 ^79 fyr *'• 1 f TABULATION OF PUBLISHED DATA ON ELECTRON DEVICES OF THE U.S.S.R. THROUGH DECEMBER 1976 Charles P. Marsden Electron Devices Division Center for Electronics and Electrical Engineering National Bureau of Standards Washington, DC 20234 December 1978 Final U.S. DEPARTMENT OF COMMERCE, Juanita M. Kreps, Secretary / Dr. Sidney Harman, Under Secretary Jordan J. Baruch, Assistant Secretary for Science and Technology NATIONAL BUREAU OF STANDARDS, Ernest Ambler, Director - 1 TABLE OF CONTENTS Page Preface i v 1. Introduction 2. Description of the Tabulation ^ 1 3. Organization of the Tabulation ’ [[ ] in ’ 4. Terminology Used the Tabulation 3 5. Groups: I. Numerical 7 II. Receiving Tubes 42 III . Power Tubes 49 IV. Rectifier Tubes 53 IV-A. Mechanotrons , Two-Anode Diode 54 V. Voltage Regulator Tubes 55 VI. Current Regulator Tubes 55 VII. Thyratrons 56 VIII. Cathode Ray Tubes 58 VIII-A. Vidicons 61 IX. Microwave Tubes 62 X. Transistors 64 X-A-l . Integrated Circuits 75 X-A-2. Integrated Circuits (Computer) 80 X-A-3. Integrated Circuits (Driver) 39 X-A-4. Integrated Circuits (Linear) 89 X- B. -
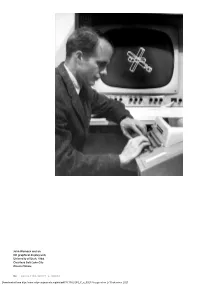
Hereby the Screen Stands in For, and Thereby Occludes, the Deeper Workings of the Computer Itself
John Warnock and an IDI graphical display unit, University of Utah, 1968. Courtesy Salt Lake City Deseret News . 24 doi:10.1162/GREY_a_00233 Downloaded from http://www.mitpressjournals.org/doi/pdf/10.1162/GREY_a_00233 by guest on 27 September 2021 The Random-Access Image: Memory and the History of the Computer Screen JACOB GABOURY A memory is a means for displacing in time various events which depend upon the same information. —J. Presper Eckert Jr. 1 When we speak of graphics, we think of images. Be it the windowed interface of a personal computer, the tactile swipe of icons across a mobile device, or the surreal effects of computer-enhanced film and video games—all are graphics. Understandably, then, computer graphics are most often understood as the images displayed on a computer screen. This pairing of the image and the screen is so natural that we rarely theorize the screen as a medium itself, one with a heterogeneous history that develops in parallel with other visual and computa - tional forms. 2 What then, of the screen? To be sure, the computer screen follows in the tradition of the visual frame that delimits, contains, and produces the image. 3 It is also the skin of the interface that allows us to engage with, augment, and relate to technical things. 4 But the computer screen was also a cathode ray tube (CRT) phosphorescing in response to an electron beam, modified by a grid of randomly accessible memory that stores, maps, and transforms thousands of bits in real time. The screen is not simply an enduring technique or evocative metaphor; it is a hardware object whose transformations have shaped the ma - terial conditions of our visual culture. -

Electronics Components
CURRENT INDUSTRIAL REPORTS SERIES 2007 MA334Q — SEMICONDUCTORS, ELECTRONIC COMPONENTS, AND SEMICONDUCTOR MANUFACTURING EQUIPMENT DEFINITIONS AND SPECIAL INSTRUCTIONS 1. Scope of survey Your figure should include — This survey covers the manufacture of semi-conductors, Electronic components parts (integrated microcircuits, printed circuit boards, connectors, capacitors, and other transistors, diodes, rectifiers, capacitors, resistors, electronic components (except relays) and semi- coils, transformers, connectors, filters, etc.) conductor machinery in the United States. (See Reference List for complete list of products collected 2. Figures to be reported on this survey.) Companies with more than one establishment but exclude — manufacturing the products covered by this survey are requested to complete a separate report form for each Electric wiring devices should be reported on survey location. If you have not received a separate form for MA335K, "Wiring Devices and Supplies." each of your establishments, please call the contact shown on the report form or write to the U.S. Census Home entertainment electronic equipment, such as Bureau for additional forms. home and automobile radio receivers, television receivers, phonographs, hi-fidelity components, a. Value of Shipments consumer audio and video tape recorders, loud- speakers, microphones, ear phones, phonograph The figures on value of shipments should include the cartridges, and public address systems should be physical shipments of all products sold, transferred to reported on survey MA334M, “Consumer Electronics.” other establishments within your company, or shipped on consignment, whether for domestic or export sale. The Analytical and optical instruments should be reported value represents the net sales price, f.o.b. plant, to the in MA334A, “Electromedical Equipment and Analytical customer or branch to which the products are shipped, Instructions.” net of discounts, allowances, freight charges and returns. -

Master Product Fisting
Richardson "' Electronics, Ltd. Master Product fisting Part #and Description Guide • Electron Tubes • Semiconductors r Electron Tubes Part Description Part # Description Part # Description LCMG-B X-Ray Tube 2AS15A Receiving Rectifier QB3.5/750GA Power Tetrode QEL1/150 Power Tetrode 2AV2 Receiving Tube 6163.5/750/6156 Power Tetrode CCS-1/Y799 CC Power Tetrode 2822 Planar Diode QBL3.5/2000 Power Triode PE1/100/6083 Power Pentode 2B35/EA50 UHF Diode W3/2GC TWi C1A Thyratron 2694 Twin Tetrode W3/2GR TWi GV1A-1650 Corona Voltage Reg 2BU2/2AS2A/2AH2 Receiving Tube 61QV03/20A UHF Twin Tetrode CE1A/B Phototube 2C36 UHF Triode QQE03/20/6252 UHF Twin Tetrode 1A3/DA90 Mini HF Diode 2C39A Planar Triode QQE03/12/6360A Twin Tetrode 1AD2A/1BY2 Receiving Tube 2C39BA Planar Triode OE3/85A1 Voltage Regulator C1 B/3C31 /5664 Thyratron 2C39WA Planar Triode OG3/85A2 MIN Volt Regulator 1B3GT/1 G3GT Receiving Tube 2C40A Planar Triode QB3/200 Power Tetrode 1B35A ATR Tube 2C43 Planar Triode QB3/300 Power Tetrode 1658A TR Tube 2C51/396A MIN Twin Triode QB3/300GA Power Tetrode 1859/R1130B Glow Modulator 2C53 High Voltage Triode T83/750 Power Triode 1B63B TR Tube 2CW4 Receiving Tube OA3NR75 Voltage Regulator 1885 Geiger-Mueller Tube 2D21 Thyratron OB3NR90 Voltage Regulator 1BQ2IDY802 Receiving Rectifier 2D21W/5727 MIN Thyratron OC3NR105 Voltage Regulator 1C21 Cold Cathode 2D54 Receiving Tube OD3NR150 Voltage Regulator 1D21 /SN4 Cold Cathode Dischg 2E22 Pentode OB3A Receiving Tube 1G3GT/ 1B3GT Receiving Tube 2E24 Beam Amplifier OC3A Voltage Regulator 1G35P Hydrogen Thyratron 2E26 Beam Amplifier OD3A Voltage Regulator 1HSGT Recv. -

1999-2019 INDEX This Index Covers Tube Collector Through April 2019, the TCA "Data Cache" DVD-ROM Set, and the Following TCA Special Publications: No
1999-2019 INDEX This index covers Tube Collector through April 2019, the TCA "Data Cache" DVD-ROM set, and the following TCA Special Publications: No. 1 Manhattan College Vacuum Tube Museum - List of Displays .........................1999 No. 2 Triodes in Radar: The Early VHF Era ...............................................................2000 No. 3 Auction Results ....................................................................................................2001 No. 4 A Tribute to George Clark, with audio CD ........................................................2002 No. 5 J. B. Johnson and the 224A CRT.........................................................................2003 No. 6 McCandless and the Audion, with audio CD......................................................2003 No. 7 AWA Tube Collector Group Fact Sheet, Vols. 1-6 ...........................................2004 No. 8 Vacuum Tubes in Telephone Work.....................................................................2004 No. 9 Origins of the Vacuum Tube, with audio CD.....................................................2005 No. 10 Early Tube Development at GE...........................................................................2005 No. 11 Thermionic Miscellany.........................................................................................2006 No. 12 RCA Master Tube Sales Plan, 1950....................................................................2006 No. 13 GE Tungar Bulb Data Manual................................................................. -
Approved for Public Release. Case 06-1104. I
APPROVED FOR PUBLIC RELEASE. CASE 06-1104. I Memorandum M-1937 Page 1 of k2 Digital Computer Laboratory Massachusetts Institute of Technology Cambridge 39* Massachusetts SUBJECT: BIWEEKLY REPORT. March 27. 1953 To: Jay W. Forrester From: Laboratory Staff 1.0 SYSTEMS 0PFRATI0N 1.1 Whirlwind I System 1.11 Operation (F. J. Eramo) The following is an estimate by the computer operators of the usable percentage of assigned operation time and the number of computer errors for the period 13 - 26 March 1953s Number of assigned hours 117 Usable percentage of assigned time 88 Usable percentage of assigned time since March, 1951 85 Number of transient errors 53 Number of steady-state errors 2 Number of intermittent errors Uo (S. H. Dodd) We are continuing our practice of having two installation days per week and have made very good progress in eliminating weak points in the circuits and readying the computer for operation with the new terminal equipment. Plans are now being formulated for a change in the positions of some of the ES control circuits so that a spare ES digit column can be in stalled. Thus when the second bank of storage is in operation, there will be one parity digit and one spare digit available for each bank. An inten sive program of testing of the various digit columns in Electrostatic Storage has been going on for several weeks with the view of determining the reasons for positive switching and, in general, increasing the reliability of operation of Electrostatic Storage. The evaporative condenser in the present air-conditioning system has been moved to a new location to prepare for the installation and tie-in of the new air-conditioning system. -

Approved for Public Release. Case 06-1104
APPROVED FOR PUBLIC RELEASE. CASE 06-1104. PROJECT WHIRLWIND SUMMARY REPORT NO. 29 FIRST QUARTER 1952 Submitted to the OFFICE OF NAVAL RESEARCH Under Contract N5ori60 Project NR 048-097 and the UNITED STATES AIR FORCE Under Contract AF19(l22)-458 DIGITAL COMPUTER LABORATORY MASSACHUSETTS INSTITUTE OF TECHNOLOGY Cambridge 39, Massachusetts APPROVED FOR PUBLIC RELEASE. CASE 06-1104. TABLE OF CONTENTS FOREWORD QUARTERLY REVIEW (AND ABSTRACT) SYSTEM ENGINEERING . 1 Storage Reliability and Checking . 2 Input-Output 3 Operational Control Center CIRCUITS AND COMPONENTS . 1 Vacuum Tubes . 2 Component Replacements in WWI . 3 Ferromagnetic and Ferroelectric Cores .4 Transistors , ELECTROSTATIC STORAGE . 1 Tube Program INPUT-OUTPUT . 1 Magnetic Tape . 2 Magnetic Drums MATHEMATICS, CODING, AND APPLICATIONS . 1 Problems Being Solved . 2 Subroutines Completed ACADEMIC PROGRAM IN AUTOMATIC COMPUTATION AND NUMERICAL ANALYSIS . 1 Automatic Computation and Numerical Analysis . 2 Seminars on Computing Machine Methods APPENDIX . 1 Reports and Publications . 2 Professional Society Papers . 3 Visitors e APPROVED FOR PUBLIC RELEASE. CASE 06-1104. 1. QUARTERLY REVIEW tion of the 16x16 ceramic array has been (AND ABSTRACT) operated, but much work remains to be done. FOREWORD A multi-position ferroelectric switch has been developed which can perform many of the During the firstquarter of 1952 the Whirl switching tasks required in an information- wind I computer used one bank of storage handling system. A magnetic-materials group tubes with a density of 32x32 (1024) spots. has been formed for the purpose of develop Project Whirlwind The original bank of 16 x 16 tubes was remov ing ferromagnetic and ferroelectric materi ed from operation. -

Active Discrete Components
Christiansen_Sec_05.qxd 10/28/04 10:40 AM Page 5.28 Source: STANDARD HANDBOOK OF ELECTRONIC ENGINEERING CHAPTER 5.2 ACTIVE DISCRETE COMPONENTS George W. Taylor, Bernard Smith, I. Reingold, Munsey E. Crost, Gregory J. Malinowski, John F. Donlon, Edward B. Hakim POWER AND RECEIVING TUBES George W. Taylor, Bernard Smith Introduction Power and receiving tubes are active devices using either the flow of free electrons in a vacuum or electrons and ions combined in a gas medium. The vast majority of uses for low-power electron tubes are found in the area of high vacuum with controlled free electrons. The source of free electrons is a heated material that is a thermionic emitter (cathode). The control element regulating the flow of electrons is called a grid. The collector element for the electron flow is the anode, or plate. Power tubes, in contrast to receiving-type tubes, handle relatively large amounts of power, and for reasons of economy, a major emphasis is placed on efficiency. The traditional division between the two tube categories is at the 25-W plate-dissipation rating level. Receiving tubes traditionally provided essential active-device functions in electronic applications. Most receiving-type tubes produced at the present time are for replacement use in existing equipments. Electronic functions of new equipment designs are being handled by solid-state devices. Power tubes are widely used as high-power-level generators and converters in radio and television transmit- ters, radar, sonar, manufacturing-process operations, and medical and industrial x-ray equipment. Classification of Types Power and receiving-type tubes can be separated into groups according to their circuit function or by the num- ber of electrodes they contain.