MOS-FET As a Current Sensor in Power Electronics Converters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A GUIDE to USING FETS for SENSOR APPLICATIONS by Ron Quan
Three Decades of Quality Through Innovation A GUIDE TO USING FETS FOR SENSOR APPLICATIONS By Ron Quan Linear Integrated Systems • 4042 Clipper Court • Fremont, CA 94538 • Tel: 510 490-9160 • Fax: 510 353-0261 • Email: [email protected] A GUIDE TO USING FETS FOR SENSOR APPLICATIONS many discrete FETs have input capacitances of less than 5 pF. Also, there are few low noise FET input op amps Linear Systems that have equivalent input noise voltages density of less provides a variety of FETs (Field Effect Transistors) than 4 nV/ 퐻푧. However, there are a number of suitable for use in low noise amplifier applications for discrete FETs rated at ≤ 2 nV/ 퐻푧 in terms of equivalent photo diodes, accelerometers, transducers, and other Input noise voltage density. types of sensors. For those op amps that are rated as low noise, normally In particular, low noise JFETs exhibit low input gate the input stages use bipolar transistors that generate currents that are desirable when working with high much greater noise currents at the input terminals than impedance devices at the input or with high value FETs. These noise currents flowing into high impedances feedback resistors (e.g., ≥1MΩ). Operational amplifiers form added (random) noise voltages that are often (op amps) with bipolar transistor input stages have much greater than the equivalent input noise. much higher input noise currents than FETs. One advantage of using discrete FETs is that an op amp In general, many op amps have a combination of higher that is not rated as low noise in terms of input current noise and input capacitance when compared to some can be converted into an amplifier with low input discrete FETs. -

Discrete Cosine Transform Based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.Mail: [email protected]
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NAL-IR Journal of Communication, Navigation and Signal Processing (January 2012) Vol. 1, No. 1, pp. 35-45 Discrete Cosine Transform based Image Fusion Techniques VPS Naidu MSDF Lab, FMCD, National Aerospace Laboratories, Bangalore, INDIA E.mail: [email protected] Abstract: Six different types of image fusion algorithms based on 1 discrete cosine transform (DCT) were developed and their , k 1 0 performance was evaluated. Fusion performance is not good while N Where (k ) 1 and using the algorithms with block size less than 8x8 and also the block 1 2 size equivalent to the image size itself. DCTe and DCTmx based , 1 k 1 N 1 1 image fusion algorithms performed well. These algorithms are very N 1 simple and might be suitable for real time applications. 1 , k 0 Keywords: DCT, Contrast measure, Image fusion 2 N 2 (k 1 ) I. INTRODUCTION 2 , 1 k 2 N 2 1 Off late, different image fusion algorithms have been developed N 2 to merge the multiple images into a single image that contain all useful information. Pixel averaging of the source images k 1 & k 2 discrete frequency variables (n1 , n 2 ) pixel index (the images to be fused) is the simplest image fusion technique and it often produces undesirable side effects in the fused image Similarly, the 2D inverse discrete cosine transform is defined including reduced contrast. To overcome this side effects many as: researchers have developed multi resolution [1-3], multi scale [4,5] and statistical signal processing [6,7] based image fusion x(n1 , n 2 ) (k 1 ) (k 2 ) N 1 N 1 techniques. -
Transducers and Sensors
3/7/2017 TRANSDUCERS AND SENSORS Dr. Ibrahim Al-Naimi Closed‐loop Control System 1 3/7/2017 CHAPTER ONE Introduction Functional Elements of a Measurement System • Basic Functional Elements 1‐Transducer Element 2‐ Signal Conditioning Element 3‐ Data Presentation Element • Auxiliary Functional Elements A‐ Calibration Element B‐ External Power supply 2 3/7/2017 Functional Elements of a Measurement System Transducer and Signal Conditioning 3 3/7/2017 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer Element • The Transducer element normally senses the desired input in one physical form and convert it to an output in another physical form. For example, the input variable to the transducer could be pressure, acceleration, or temperature and the output of transducer may be disp lacemen t, voltage, or resitistance change depending on the type of transducer element. 4 3/7/2017 Transducer Element • Single stage • Double stage Single Stage Transducer 5 3/7/2017 Double Stage Transducer Typical Examples of Transducer Elements 6 3/7/2017 Typical Examples of Transducer Elements Typical Examples of Transducer Elements 7 3/7/2017 Transducers classification • Based on power type classification ‐ Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) ‐ Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal ‐ Analogue Transducers (stain gauges, LVDT, etc…) ‐ Digital Transducers (Absolute and incremental encoders) 8 3/7/2017 Transducers classification • Based on the electrical phenomenon or parameter tha t may be chdhanged due to the whole process. -

Temperature Compensation Circuit for ISFET Sensor
Journal of Low Power Electronics and Applications Article Temperature Compensation Circuit for ISFET Sensor Ahmed Gaddour 1,2,* , Wael Dghais 2,3, Belgacem Hamdi 2,3 and Mounir Ben Ali 3,4 1 National Engineering School of Monastir (ENIM), University of Monastir, Monastir 5000, Tunisia 2 Electronics and Microelectronics Laboratory, LR99ES30, Faculty of Sciences of Monastir, University of Monastir, Monastir 5000, Tunisia; [email protected] (W.D.); [email protected] (B.H.) 3 Higher Institute of Applied Sciences and Technology of Sousse (ISSATSo), University of Sousse, Sousse 4003, Tunisia; [email protected] 4 Nanomaterials, Microsystems for Health, Environment and Energy Laboratory, LR16CRMN01, Centre for Research on Microelectronics and Nanotechnology, Sousse 4034, Tunisia * Correspondence: [email protected]; Tel.: +216-50998008 Received: 3 November 2019; Accepted: 21 December 2019; Published: 4 January 2020 Abstract: PH measurements are widely used in agriculture, biomedical engineering, the food industry, environmental studies, etc. Several healthcare and biomedical research studies have reported that all aqueous samples have their pH tested at some point in their lifecycle for evaluation of the diagnosis of diseases or susceptibility, wound healing, cellular internalization, etc. The ion-sensitive field effect transistor (ISFET) is capable of pH measurements. Such use of the ISFET has become popular, as it allows sensing, preprocessing, and computational circuitry to be encapsulated on a single chip, enabling miniaturization and portability. However, the extracted data from the sensor have been affected by the variation of the temperature. This paper presents a new integrated circuit that can enhance the immunity of ion-sensitive field effect transistors (ISFET) against the temperature. -
Transducers in Audio ● Transducer: Any Mechanism That Transforms One Form of Energy Into Another Form of Energy
Transducers in Audio ● Transducer: Any mechanism that transforms one form of energy into another form of energy. ○ Physical energy into mechanical energy ○ Physical energy into electrical energy ○ Mechanical energy into electrical energy ○ Vice versa Audio is primarily concerned with turning physical acoustic energy into electrical energy and back again. What are our two most basic audio transducers? scienceaid.net https://socratic.org/questions/what-part-of-the-ear-contains-the-sensory-receptors-for-hearing From Acoustic to Electric Energy First...a short trip into basic electrical theory... Michael Faraday http://www.rigb.org/our-history/michael-faraday Electro-magnetism Faraday’s Law of Induction: Basically, any change in the magnetic field of a coil of wire will cause a voltage to be induced in a wire. Conversely, any change in the voltage on a coil of wire will cause the magnetic field to change. This is called electromagnetism, and the field created is called an electro-magnetic field. Capacitance When two conductors are given an opposite charge, an electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors (for example the distance between them) changes it causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png Capacitance When two conductors are given an opposite charge, a electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors, for example the distance between them, changes is causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png ● Alternating Current (AC) vs Direct Current (DC) ○ AC charge changes from positive to negative across the zero axis. -
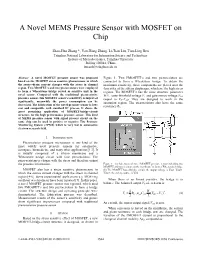
A Novel MEMS Pressure Sensor with MOSFET on Chip
A Novel MEMS Pressure Sensor with MOSFET on Chip Zhao-Hua Zhang *, Yan-Hong Zhang, Li-Tian Liu, Tian-Ling Ren Tsinghua National Laboratory for Information Science and Technology Institute of Microelectronics, Tsinghua University Beijing 100084, China [email protected] Abstract—A novel MOSFET pressure sensor was proposed Figure 1. Two PMOSFET’s and two piezoresistors are based on the MOSFET stress sensitive phenomenon, in which connected to form a Wheatstone bridge. To obtain the the source-drain current changes with the stress in channel maximum sensitivity, these components are placed near the region. Two MOSFET’s and two piezoresistors were employed four sides of the silicon diaphragm, which are the high stress to form a Wheatstone bridge served as sensitive unit in the regions. The MOSFET’s has the same structure parameter novel sensor. Compared with the traditional piezoresistive W/L, same threshold voltage VT and gate-source voltage VGS pressure sensor, this MOSFET sensor’s sensitivity is improved (equal to VG-Vdd). They are designed to work in the significantly, meanwhile the power consumption can be saturation region. The piezoresistors also have the same decreased. The fabrication of the novel pressure sensor is low- resistance R . cost and compatible with standard IC process. It shows the 0 great promising application of MOSFET-bridge-circuit structure for the high performance pressure sensor. This kind of MEMS pressure sensor with signal process circuit on the same chip can be used in positive or negative Tire Pressure Monitoring System (TPMS) which is very hot in automotive electron research field. I. -

Simplifying Current Sensing (Rev. A)
Simplifying Current Sensing How to design with current sense amplifiers Table of contents Introduction . 3 Chapter 4: Integrating the current-sensing signal chain Chapter 1: Current-sensing overview Integrating the current-sensing signal path . 40 Integrating the current-sense resistor . 42 How integrated-resistor current sensors simplify Integrated, current-sensing PCB designs . 4 analog-to-digital converter . 45 Shunt-based current-sensing solutions for BMS Enabling Precision Current Sensing Designs with applications in HEVs and EVs . 6 Non-Ratiometric Magnetic Current Sensors . 48 Common uses for multichannel current monitoring . 9 Power and energy monitoring with digital Chapter 5: Wide VIN and isolated current sensors . 11 current measurement 12-V Battery Monitoring in an Automotive Module . 14 Simplifying voltage and current measurements in Interfacing a differential-output (isolated) amplifier battery test equipment . 17 to a single-ended-input ADC . 50 Extending beyond the maximum common-mode range of discrete current-sense amplifiers . 52 Chapter 2: Out-of-range current measurements Low-Drift, Precision, In-Line Isolated Magnetic Motor Current Measurements . 55 Measuring current to detect out-of-range conditions . 20 Monitoring current for multiple out-of-range Authors: conditions . 22 Scott Hill, Dennis Hudgins, Arjun Prakash, Greg Hupp, High-side motor current monitoring for overcurrent protection . 25 Scott Vestal, Alex Smith, Leaphar Castro, Kevin Zhang, Maka Luo, Raphael Puzio, Kurt Eckles, Guang Zhou, Chapter 3: Current sensing in Stephen Loveless, Peter Iliya switching systems Low-drift, precision, in-line motor current measurements with enhanced PWM rejection . 28 High-side drive, high-side solenoid monitor with PWM rejection . 30 Current-mode control in switching power supplies . -
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-Kv Sic MOSFET Modules
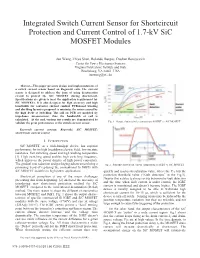
Integrated Switch Current Sensor for Shortcircuit Protection and Current Control of 1.7-kV SiC MOSFET Modules Jun Wang, Zhiyu Shen, Rolando Burgos, Dushan Boroyevich Center for Power Electronics Systems Virginia Polytechnic Institute and State Blacksburg, VA 24061, USA [email protected] Abstract—This paper presents design and implementations of a switch current sensor based on Rogowski coils. The current sensor is designed to address the issue of using desaturation circuit to protect the SiC MOSFET during shortcircuit. Specifications are given to meet the application requirement for SiC MOSFETs. It is also designed for high accuracy and high bandwidth for converter current control. PCB-based winding and shielding layout is proposed to minimize the noises caused by the high dv/dt at switching. The coil on PCB are modeled by impedance measurement, thus the bandwidth of coil is calculated. At the end, various test results are demonstrated to validate the great performance of the switch current sensor. Fig. 1. Output characteristics comparison: Si IGBT vs. SiC MOSFET Keywords—current sensing; Rogowski; SiC MOSFET; shortcircuit; current control I. INTRODUCTION SiC MOSFET, as a wide-bandgap device, has superior performance for its high breakdown electric field, low on-state resistance, fast switching speed and high working temperature [1]. High switching speed enables high switching frequency, which improves the power density of high power converters. The gradual cost reduction and packaging advancement bring a Fig. 2. Principle shortcircuit current comparison: Si IGBT vs. SiC MOSFET promising trend of replacing the conventional Si IGBTs with SiC MOSFET modules in high power applications. quickly and reaches its saturation value, where the VCE hits the Shortcircuit protection is one of the major challenges protection threshold value (“Fault detection” in the Fig.1). -

Basic Physics of Ultrasonographic Imaging
BASIC PHYSICS OF ULTlVlSONOGRAPHIC IMAGING Diagnostic Imaging and Laboratory Technology Essential Health Technologies Health Technology and Pharmaceuticals WORLD HEALTH ORGANIZATION Geneva BASIC PHYSICS OF ULTRASONOGRAPHIC IMAGING Editor Harald Ostensen Author Nimrod M. Tole, Ph.D. Associate Professor of Medical Physics Department of Diagnostic Radiology University of Nairobi WORLD HEALTH ORGANIZATION WHO Library Cataloguing-in-Publication Data Tole, Nimrod M. Basic physics of ultrasonic imaging / by Nimrod M. Tole. 1. Ultrasonography I. Title. ISBN 92 41592990 (NLM classification: WN 208) © World Health Organization 2005 All rights reserved. Publications of the World Health Organization can be obtained from WHO Press, World Health Organization, 20 Avenue Appia, 1211 Geneva 27, Switzerland (tel: +41 22 791 2476; fax: +41 22791 4857; email: [email protected]). Requests for permission to reproduce or translate WHO publications - whether for sale or for noncommercial distribution - should be addressed to WHO Press, at the above address (fax: +41 22791 4806; email: [email protected]). The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the World Health Organization concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. Dotted lines on maps represent approximate border lines for which there may not yet be full agreement. The mention of specific companies or of certain manufacturers' products does not imply that they are endorsed or recommended by the World Health Organization in preference to others of a similar nature that are not mentioned. -

Chapter 1 Introduction to Measurement Systems
4/3/2019 Advanced Measurement Systems and Sensors Dr. Ibrahim Al-Naimi Chapter one Introduction to Measurement Systems 1 4/3/2019 Outlines • Control and measurement systems • Transducer/sensor definition and classifications • Signal conditioning definition and classifications • Units of measurements • Types of errors • Transducer/sensor transfer function • Transducer characteristics • Statistical analysis Closed-loop Control System 2 4/3/2019 Measurement System Transducer and Signal Conditioning 3 4/3/2019 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer and Sensor • Transducers are elements that respond to changes in the physical condition of a system and deliver output signals related to the measured, but of a different form and nature. • Sensor is the initial stage in any transducer. • The property of transducer element is affected by the variation of the external physical variable according to unique relationship. 4 4/3/2019 Transducers classification • Based on power type classification - Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) - Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal - Analogue Transducers (stain -

Maximizing Efficiency in Active Loudspeaker Systems
Maximizing Efficiency in Active Loudspeaker Systems Wolfgang Klippel, KLIPPEL GmbH, Dresden, Germany Increasing the efficiency of the electro-acoustical conversion is the key to modern audio devices generating the required sound output with minimum size, weight, cost and energy. There is unused potential for increasing the efficiency of the electro-dynamical transducer by using a nonlinear motor topology, a soft suspension and cultivating the modal resonances in the mechanical and acoustical system. However, transducers optimized for maximum efficiency are more prone to nonlinear and unstable behavior. Nonlinear adaptive control can compensate for the undesired signal distortion, protect the transducer against overload, stabilize the voice coil position and cope with time varying properties of the suspension. The paper discusses the design of modern active systems that combine the new opportunities provided by software algorithms with the optimization of the hardware components in the transducer and power amplifier. reducing power consumption in portable 1 Introduction applications with limited battery capacity. The user of loudspeakers, headphone and other For this discussion, the paper provides new audio devices expects that the audio signal can be definitions of the efficiency to consider the influence reproduced at sufficient amplitude and quality but of the spectral properties of the complex audio prefers products which are smaller, lighter, less cost signals (e.g. music). The paper explains the intensive and provide a longer stand-alone operation difference between efficiency and voltage in personal applications. sensitivity, which is a second important Creating such an audio product requires a characteristic of the transducer required to match the combination of hardware and software components transducer with the power amplifier. -

Development of MEMS Capacitive Sensor Using a MOSFET Structure
Extended Summary 本文は pp.102-107 Development of MEMS Capacitive Sensor Using a MOSFET Structure Hayato Izumi Non-member (Kansai University, [email protected]) Yohei Matsumoto Non-member (Kansai University, [email protected] u.ac.jp) Seiji Aoyagi Member (Kansai University, [email protected] u.ac.jp) Yusaku Harada Non-member (Kansai University, [email protected] u.ac.jp) Shoso Shingubara Non-member (Kansai University, [email protected]) Minoru Sasaki Member (Toyota Technological Institute, [email protected]) Kazuhiro Hane Member (Tohoku University, [email protected]) Hiroshi Tokunaga Non-member (M. T. C. Corp., [email protected]) Keywords : MOSFET, capacitive sensor, accelerometer, circuit for temperature compensation The concept of a capacitive MOSFET sensor for detecting voltage change, is proposed (Fig. 4). This circuitry is effective for vertical force applied to its floating gate was already reported by compensating ambient temperature, since two MOSFETs are the authors (Fig. 1). This sensor detects the displacement of the simultaneously suffer almost the same temperature change. The movable gate electrode from changes in drain current, and this performance of this circuitry is confirmed by SPICE simulation. current can be amplified electrically by adding voltage to the gate, The operating point, i.e., the output voltage, is stable irrespective i.e., the MOSFET itself serves as a mechanical sensor structure. of the ambient temperature change (Fig. 5(a)). The output voltage Following this, in the present paper, a practical test device is has comparatively good linearity to the gap length, which would fabricated.