Execution Unit and BIU Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Soft Machines Targets Ipcbottleneck
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area. -

Micro-Circuits for High Energy Physics*
MICRO-CIRCUITS FOR HIGH ENERGY PHYSICS* Paul F. Kunz Stanford Linear Accelerator Center Stanford University, Stanford, California, U.S.A. ABSTRACT Microprogramming is an inherently elegant method for implementing many digital systems. It is a mixture of hardware and software techniques with the logic subsystems controlled by "instructions" stored Figure 1: Basic TTL Gate in a memory. In the past, designing microprogrammed systems was difficult, tedious, and expensive because the available components were capable of only limited number of functions. Today, however, large blocks of microprogrammed systems have been incorporated into a A input B input C output single I.e., thus microprogramming has become a simple, practical method. false false true false true true true false true true true false 1. INTRODUCTION 1.1 BRIEF HISTORY OF MICROCIRCUITS Figure 2: Truth Table for NAND Gate. The first question which arises when one talks about microcircuits is: What is a microcircuit? The answer is simple: a complete circuit within a single integrated-circuit (I.e.) package or chip. The next question one might ask is: What circuits are available? The answer to this question is also simple: it depends. It depends on the economics of the circuit for the semiconductor manufacturer, which depends on the technology he uses, which in turn changes as a function of time. Thus to understand Figure 3: Logical NOT Circuit. what microcircuits are available today and what makes them different from those of yesterday it is interesting to look into the economics of producing microcircuits. The basic element in a logic circuit is a gate, which is a circuit with a number of inputs and one output and it performs a basic logical function such as AND, OR, or NOT. -

Arithmetic and Logical Unit Design for Area Optimization for Microcontroller Amrut Anilrao Purohit 1,2 , Mohammed Riyaz Ahmed 2 and R
et International Journal on Emerging Technologies 11 (2): 668-673(2020) ISSN No. (Print): 0975-8364 ISSN No. (Online): 2249-3255 Arithmetic and Logical Unit Design for Area Optimization for Microcontroller Amrut Anilrao Purohit 1,2 , Mohammed Riyaz Ahmed 2 and R. Venkata Siva Reddy 2 1Research Scholar, VTU Belagavi (Karnataka), India. 2School of Electronics and Communication Engineering, REVA University Bengaluru, (Karnataka), India. (Corresponding author: Amrut Anilrao Purohit) (Received 04 January 2020, Revised 02 March 2020, Accepted 03 March 2020) (Published by Research Trend, Website: www.researchtrend.net) ABSTRACT: Arithmetic and Logic Unit (ALU) can be understood with basic knowledge of digital electronics and any engineer will go through the details only once. The advantage of knowing ALU in detail is two- folded: firstly, programming of the processing device can be efficient and secondly, can design a new ALU architecture as per the various constraints of the use cases. The miniaturization of digital circuits can be achieved by either reducing the size of transistor (Moore’s law) or by optimizing the gate count of the circuit. The first has been explored extensively while the latter has been ignored which deals with the application of Boolean rules and requires sound knowledge of logic design. The ultimate outcome is to have an area optimized architecture/approach that optimizes the circuit at gate level. The design of ALU is for various processing devices varies with the device/system requirements. The area optimization places a significant role in the chip design. Here in this work, we have attempted to design an ALU which is area efficient while being loaded with additional functionality necessary for microcontrollers. -

Unit 8 : Microprocessor Architecture
Unit 8 : Microprocessor Architecture Lesson 1 : Microcomputer Structure 1.1. Learning Objectives On completion of this lesson you will be able to : ♦ draw the block diagram of a simple computer ♦ understand the function of different units of a microcomputer ♦ learn the basic operation of microcomputer bus system. 1.2. Digital Computer A digital computer is a multipurpose, programmable machine that reads A digital computer is a binary instructions from its memory, accepts binary data as input and multipurpose, programmable processes data according to those instructions, and provides results as machine. output. 1.3. Basic Computer System Organization Every computer contains five essential parts or units. They are Basic computer system organization. i. the arithmetic logic unit (ALU) ii. the control unit iii. the memory unit iv. the input unit v. the output unit. 1.3.1. The Arithmetic and Logic Unit (ALU) The arithmetic and logic unit (ALU) is that part of the computer that The arithmetic and logic actually performs arithmetic and logical operations on data. All other unit (ALU) is that part of elements of the computer system - control unit, register, memory, I/O - the computer that actually are there mainly to bring data into the ALU to process and then to take performs arithmetic and the results back out. logical operations on data. An arithmetic and logic unit and, indeed, all electronic components in the computer are based on the use of simple digital logic devices that can store binary digits and perform simple Boolean logic operations. Data are presented to the ALU in registers. These registers are temporary storage locations within the CPU that are connected by signal paths of the ALU. -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -

Performance of a Computer (Chapter 4) Vishwani D
ELEC 5200-001/6200-001 Computer Architecture and Design Fall 2013 Performance of a Computer (Chapter 4) Vishwani D. Agrawal & Victor P. Nelson epartment of Electrical and Computer Engineering Auburn University, Auburn, AL 36849 ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 1 What is Performance? Response time: the time between the start and completion of a task. Throughput: the total amount of work done in a given time. Some performance measures: MIPS (million instructions per second). MFLOPS (million floating point operations per second), also GFLOPS, TFLOPS (1012), etc. SPEC (System Performance Evaluation Corporation) benchmarks. LINPACK benchmarks, floating point computing, used for supercomputers. Synthetic benchmarks. ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 2 Small and Large Numbers Small Large 10-3 milli m 103 kilo k 10-6 micro μ 106 mega M 10-9 nano n 109 giga G 10-12 pico p 1012 tera T 10-15 femto f 1015 peta P 10-18 atto 1018 exa 10-21 zepto 1021 zetta 10-24 yocto 1024 yotta ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 3 Computer Memory Size Number bits bytes 210 1,024 K Kb KB 220 1,048,576 M Mb MB 230 1,073,741,824 G Gb GB 240 1,099,511,627,776 T Tb TB ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 4 Units for Measuring Performance Time in seconds (s), microseconds (μs), nanoseconds (ns), or picoseconds (ps). Clock cycle Period of the hardware clock Example: one clock cycle means 1 nanosecond for a 1GHz clock frequency (or 1GHz clock rate) CPU time = (CPU clock cycles)/(clock rate) Cycles per instruction (CPI): average number of clock cycles used to execute a computer instruction. -

Chap01: Computer Abstractions and Technology
CHAPTER 1 Computer Abstractions and Technology 1.1 Introduction 3 1.2 Eight Great Ideas in Computer Architecture 11 1.3 Below Your Program 13 1.4 Under the Covers 16 1.5 Technologies for Building Processors and Memory 24 1.6 Performance 28 1.7 The Power Wall 40 1.8 The Sea Change: The Switch from Uniprocessors to Multiprocessors 43 1.9 Real Stuff: Benchmarking the Intel Core i7 46 1.10 Fallacies and Pitfalls 49 1.11 Concluding Remarks 52 1.12 Historical Perspective and Further Reading 54 1.13 Exercises 54 CMPS290 Class Notes (Chap01) Page 1 / 24 by Kuo-pao Yang 1.1 Introduction 3 Modern computer technology requires professionals of every computing specialty to understand both hardware and software. Classes of Computing Applications and Their Characteristics Personal computers o A computer designed for use by an individual, usually incorporating a graphics display, a keyboard, and a mouse. o Personal computers emphasize delivery of good performance to single users at low cost and usually execute third-party software. o This class of computing drove the evolution of many computing technologies, which is only about 35 years old! Server computers o A computer used for running larger programs for multiple users, often simultaneously, and typically accessed only via a network. o Servers are built from the same basic technology as desktop computers, but provide for greater computing, storage, and input/output capacity. Supercomputers o A class of computers with the highest performance and cost o Supercomputers consist of tens of thousands of processors and many terabytes of memory, and cost tens to hundreds of millions of dollars. -
Parallel Computing
Lecture 1: Computer Organization 1 Outline • Overview of parallel computing • Overview of computer organization – Intel 8086 architecture • Implicit parallelism • von Neumann bottleneck • Cache memory – Writing cache-friendly code 2 Why parallel computing • Solving an × linear system Ax=b by using Gaussian elimination takes ≈ flops. 1 • On Core i7 975 @ 4.0 GHz,3 which is capable of about 3 60-70 Gigaflops flops time 1000 3.3×108 0.006 seconds 1000000 3.3×1017 57.9 days 3 What is parallel computing? • Serial computing • Parallel computing https://computing.llnl.gov/tutorials/parallel_comp 4 Milestones in Computer Architecture • Analytic engine (mechanical device), 1833 – Forerunner of modern digital computer, Charles Babbage (1792-1871) at University of Cambridge • Electronic Numerical Integrator and Computer (ENIAC), 1946 – Presper Eckert and John Mauchly at the University of Pennsylvania – The first, completely electronic, operational, general-purpose analytical calculator. 30 tons, 72 square meters, 200KW. – Read in 120 cards per minute, Addition took 200µs, Division took 6 ms. • IAS machine, 1952 – John von Neumann at Princeton’s Institute of Advanced Studies (IAS) – Program could be represented in digit form in the computer memory, along with data. Arithmetic could be implemented using binary numbers – Most current machines use this design • Transistors was invented at Bell Labs in 1948 by J. Bardeen, W. Brattain and W. Shockley. • PDP-1, 1960, DEC – First minicomputer (transistorized computer) • PDP-8, 1965, DEC – A single bus -

CPU) the CPU Is the Brains of the Computer, and Is Also Known As the Processor (A Single Chip Also Known As Microprocessor)
Central processing unit (CPU) The CPU is the brains of the computer, and is also known as the processor (a single chip also known as microprocessor). This electronic component interprets and carries out the basic instructions that operate the computer. Cache as a rule holds data waiting to be processed and instructions waiting to be executed. The main parts of the CPU are: control unit arithmetic logic unit (ALU), and registers – also referred as Cache registers The CPU is connected to a circuit board called the motherboard also known as the system board. Click here to see more information on the CPU Let’s look inside the CPU and see what the different components actually do and how they interact Control unit The control unit directs and co-ordinates most of the operations in the computer. It is a bit similar to a traffic officer controlling traffic! It translates instructions received from a program/application and then begins the appropriate action to carry out the instruction. Specifically the control unit: controls how and when input devices send data stores and retrieves data to and from specific locations in memory decodes and executes instructions sends data to other parts of the CPU during operations sends data to output devices on request Arithmetic Logic Unit (ALU): The ALU is the computer’s calculator. It handles all math operations such as: add subtract multiply divide logical decisions - true or false, and/or, greater then, equal to, or less than Registers Registers are special temporary storage areas on the CPU. They are: used to store items during arithmetic, logic or transfer operations. -

Programmable Digital Microcircuits - a Survey with Examples of Use
- 237 - PROGRAMMABLE DIGITAL MICROCIRCUITS - A SURVEY WITH EXAMPLES OF USE C. Verkerk CERN, Geneva, Switzerland 1. Introduction For most readers the title of these lecture notes will evoke microprocessors. The fixed instruction set microprocessors are however not the only programmable digital mi• crocircuits and, although a number of pages will be dedicated to them, the aim of these notes is also to draw attention to other useful microcircuits. A complete survey of programmable circuits would fill several books and a selection had therefore to be made. The choice has rather been to treat a variety of devices than to give an in- depth treatment of a particular circuit. The selected devices have all found useful ap• plications in high-energy physics, or hold promise for future use. The microprocessor is very young : just over eleven years. An advertisement, an• nouncing a new era of integrated electronics, and which appeared in the November 15, 1971 issue of Electronics News, is generally considered its birth-certificate. The adver• tisement was for the Intel 4004 and its three support chips. The history leading to this announcement merits to be recalled. Intel, then a very young company, was working on the design of a chip-set for a high-performance calculator, for and in collaboration with a Japanese firm, Busicom. One of the Intel engineers found the Busicom design of 9 different chips too complicated and tried to find a more general and programmable solu• tion. His design, the 4004 microprocessor, was finally adapted by Busicom, and after further négociation, Intel acquired marketing rights for its new invention. -

Reverse Engineering X86 Processor Microcode
Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz, Ruhr-University Bochum https://www.usenix.org/conference/usenixsecurity17/technical-sessions/presentation/koppe This paper is included in the Proceedings of the 26th USENIX Security Symposium August 16–18, 2017 • Vancouver, BC, Canada ISBN 978-1-931971-40-9 Open access to the Proceedings of the 26th USENIX Security Symposium is sponsored by USENIX Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz Ruhr-Universitat¨ Bochum Abstract hardware modifications [48]. Dedicated hardware units to counter bugs are imperfect [36, 49] and involve non- Microcode is an abstraction layer on top of the phys- negligible hardware costs [8]. The infamous Pentium fdiv ical components of a CPU and present in most general- bug [62] illustrated a clear economic need for field up- purpose CPUs today. In addition to facilitate complex and dates after deployment in order to turn off defective parts vast instruction sets, it also provides an update mechanism and patch erroneous behavior. Note that the implementa- that allows CPUs to be patched in-place without requiring tion of a modern processor involves millions of lines of any special hardware. While it is well-known that CPUs HDL code [55] and verification of functional correctness are regularly updated with this mechanism, very little is for such processors is still an unsolved problem [4, 29]. known about its inner workings given that microcode and the update mechanism are proprietary and have not been Since the 1970s, x86 processor manufacturers have throughly analyzed yet. -
Design of the MIPS Processor
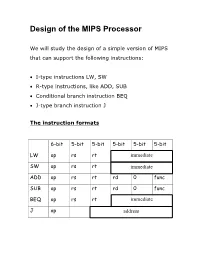
Design of the MIPS Processor We will study the design of a simple version of MIPS that can support the following instructions: • I-type instructions LW, SW • R-type instructions, like ADD, SUB • Conditional branch instruction BEQ • J-type branch instruction J The instruction formats 6-bit 5-bit 5-bit 5-bit 5-bit 5-bit LW op rs rt immediate SW op rs rt immediate ADD op rs rt rd 0 func SUB op rs rt rd 0 func BEQ op rs rt immediate J op address ALU control ALU control (3-bit) 32 ALU result 32 ALU control input ALU function 000 AND 001 OR 010 add 110 sub 111 Set less than How to generate the ALU control input? The control unit first generates this from the opcode of the instruction. A single-cycle MIPS We consider a simple version of MIPS that uses Harvard architecture. Harvard architecture uses separate memory for instruction and data. Instruction memory is read-only – a programmer cannot write into the instruction memory. To read from the data memory, set Memory read =1 To write into the data memory, set Memory write =1 Instruction fetching Clock Each clock cycle fetches the instruction from the address specified by the PC, and increments PC by 4 at the same time. Executing R-type instructions This is the instruction format for the R-type instructions. Here are the steps in the execution of an R-type instruction: ♦ Read instruction ♦ Read source registers rs and rt ♦ ALU performs the desired operation ♦ Store result in the destination register rd.