Reverse Engineering X86 Processor Microcode
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance
White Paper Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance Ofri Wechsler Intel Fellow, Mobility Group Director, Mobility Microprocessor Architecture Intel Corporation White Paper Inside Intel®Core™ Microarchitecture Introduction Introduction 2 The Intel® Core™ microarchitecture is a new foundation for Intel®Core™ Microarchitecture Design Goals 3 Intel® architecture-based desktop, mobile, and mainstream server multi-core processors. This state-of-the-art multi-core optimized Delivering Energy-Efficient Performance 4 and power-efficient microarchitecture is designed to deliver Intel®Core™ Microarchitecture Innovations 5 increased performance and performance-per-watt—thus increasing Intel® Wide Dynamic Execution 6 overall energy efficiency. This new microarchitecture extends the energy efficient philosophy first delivered in Intel's mobile Intel® Intelligent Power Capability 8 microarchitecture found in the Intel® Pentium® M processor, and Intel® Advanced Smart Cache 8 greatly enhances it with many new and leading edge microar- Intel® Smart Memory Access 9 chitectural innovations as well as existing Intel NetBurst® microarchitecture features. What’s more, it incorporates many Intel® Advanced Digital Media Boost 10 new and significant innovations designed to optimize the Intel®Core™ Microarchitecture and Software 11 power, performance, and scalability of multi-core processors. Summary 12 The Intel Core microarchitecture shows Intel’s continued Learn More 12 innovation by delivering both greater energy efficiency Author Biographies 12 and compute capability required for the new workloads and usage models now making their way across computing. With its higher performance and low power, the new Intel Core microarchitecture will be the basis for many new solutions and form factors. In the home, these include higher performing, ultra-quiet, sleek and low-power computer designs, and new advances in more sophisticated, user-friendly entertainment systems. -

PIPELINING and ASSOCIATED TIMING ISSUES Introduction: While
PIPELINING AND ASSOCIATED TIMING ISSUES Introduction: While studying sequential circuits, we studied about Latches and Flip Flops. While Latches formed the heart of a Flip Flop, we have explored the use of Flip Flops in applications like counters, shift registers, sequence detectors, sequence generators and design of Finite State machines. Another important application of latches and flip flops is in pipelining combinational/algebraic operation. To understand what is pipelining consider the following example. Let us take a simple calculation which has three operations to be performed viz. 1. add a and b to get (a+b), 2. get magnitude of (a+b) and 3. evaluate log |(a + b)|. Each operation would consume a finite period of time. Let us assume that each operation consumes 40 nsec., 35 nsec. and 60 nsec. respectively. The process can be represented pictorially as in Fig. 1. Consider a situation when we need to carry this out for a set of 100 such pairs. In a normal course when we do it one by one it would take a total of 100 * 135 = 13,500 nsec. We can however reduce this time by the realization that the whole process is a sequential process. Let the values to be evaluated be a1 to a100 and the corresponding values to be added be b1 to b100. Since the operations are sequential, we can first evaluate (a1 + b1) while the value |(a1 + b1)| is being evaluated the unit evaluating the sum is dormant and we can use it to evaluate (a2 + b2) giving us both |(a1 + b1)| and (a2 + b2) at the end of another evaluation period. -

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -

Microcode Revision Guidance August 31, 2019 MCU Recommendations
microcode revision guidance August 31, 2019 MCU Recommendations Section 1 – Planned microcode updates • Provides details on Intel microcode updates currently planned or available and corresponding to Intel-SA-00233 published June 18, 2019. • Changes from prior revision(s) will be highlighted in yellow. Section 2 – No planned microcode updates • Products for which Intel does not plan to release microcode updates. This includes products previously identified as such. LEGEND: Production Status: • Planned – Intel is planning on releasing a MCU at a future date. • Beta – Intel has released this production signed MCU under NDA for all customers to validate. • Production – Intel has completed all validation and is authorizing customers to use this MCU in a production environment. -

The Central Processing Unit(CPU). the Brain of Any Computer System Is the CPU
Computer Fundamentals 1'stage Lec. (8 ) College of Computer Technology Dept.Information Networks The central processing unit(CPU). The brain of any computer system is the CPU. It controls the functioning of the other units and process the data. The CPU is sometimes called the processor, or in the personal computer field called “microprocessor”. It is a single integrated circuit that contains all the electronics needed to execute a program. The processor calculates (add, multiplies and so on), performs logical operations (compares numbers and make decisions), and controls the transfer of data among devices. The processor acts as the controller of all actions or services provided by the system. Processor actions are synchronized to its clock input. A clock signal consists of clock cycles. The time to complete a clock cycle is called the clock period. Normally, we use the clock frequency, which is the inverse of the clock period, to specify the clock. The clock frequency is measured in Hertz, which represents one cycle/second. Hertz is abbreviated as Hz. Usually, we use mega Hertz (MHz) and giga Hertz (GHz) as in 1.8 GHz Pentium. The processor can be thought of as executing the following cycle forever: 1. Fetch an instruction from the memory, 2. Decode the instruction (i.e., determine the instruction type), 3. Execute the instruction (i.e., perform the action specified by the instruction). Execution of an instruction involves fetching any required operands, performing the specified operation, and writing the results back. This process is often referred to as the fetch- execute cycle, or simply the execution cycle. -

POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors
POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors THE ABILITY TO ESTIMATE POWER CONSUMPTION DURING EARLY-STAGE DEFINITION AND TRADE-OFF STUDIES IS A KEY NEW METHODOLOGY ENHANCEMENT. OPPORTUNITIES FOR SAVING POWER CAN BE EXPOSED VIA MICROARCHITECTURE-LEVEL MODELING, PARTICULARLY THROUGH CLOCK- GATING AND DYNAMIC ADAPTATION. Power dissipation limits have Thus far, most of the work done in the area David M. Brooks emerged as a major constraint in the design of high-level power estimation has been focused of microprocessors. At the low end of the per- at the register-transfer-level (RTL) description Pradip Bose formance spectrum, namely in the world of in the processor design flow. Only recently have handheld and portable devices or systems, we seen a surge of interest in estimating power Stanley E. Schuster power has always dominated over perfor- at the microarchitecture definition stage, and mance (execution time) as the primary design specific work on power-efficient microarchi- Hans Jacobson issue. Battery life and system cost constraints tecture design has been reported.2-8 drive the design team to consider power over Here, we describe the approach of using Prabhakar N. Kudva performance in such a scenario. energy-enabled performance simulators in Increasingly, however, power is also a key early design. We examine some of the emerg- Alper Buyuktosunoglu design issue in the workstation and server mar- ing paradigms in processor design and com- kets (see Gowan et al.)1 In this high-end arena ment on their inherent power-performance John-David Wellman the increasing microarchitectural complexities, characteristics. clock frequencies, and die sizes push the chip- Victor Zyuban level—and hence the system-level—power Power-performance efficiency consumption to such levels that traditionally See the “Power-performance fundamentals” Manish Gupta air-cooled multiprocessor server boxes may box. -

The Von Neumann Computer Model 5/30/17, 10:03 PM
The von Neumann Computer Model 5/30/17, 10:03 PM CIS-77 Home http://www.c-jump.com/CIS77/CIS77syllabus.htm The von Neumann Computer Model 1. The von Neumann Computer Model 2. Components of the Von Neumann Model 3. Communication Between Memory and Processing Unit 4. CPU data-path 5. Memory Operations 6. Understanding the MAR and the MDR 7. Understanding the MAR and the MDR, Cont. 8. ALU, the Processing Unit 9. ALU and the Word Length 10. Control Unit 11. Control Unit, Cont. 12. Input/Output 13. Input/Output Ports 14. Input/Output Address Space 15. Console Input/Output in Protected Memory Mode 16. Instruction Processing 17. Instruction Components 18. Why Learn Intel x86 ISA ? 19. Design of the x86 CPU Instruction Set 20. CPU Instruction Set 21. History of IBM PC 22. Early x86 Processor Family 23. 8086 and 8088 CPU 24. 80186 CPU 25. 80286 CPU 26. 80386 CPU 27. 80386 CPU, Cont. 28. 80486 CPU 29. Pentium (Intel 80586) 30. Pentium Pro 31. Pentium II 32. Itanium processor 1. The von Neumann Computer Model Von Neumann computer systems contain three main building blocks: The following block diagram shows major relationship between CPU components: the central processing unit (CPU), memory, and input/output devices (I/O). These three components are connected together using the system bus. The most prominent items within the CPU are the registers: they can be manipulated directly by a computer program. http://www.c-jump.com/CIS77/CPU/VonNeumann/lecture.html Page 1 of 15 IPR2017-01532 FanDuel, et al. -

The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and Computer
Microprocessors (0630371) Fall 2010/2011 – Lecture Notes # 1 The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and computer Outline of the Lecture Evolution of programming languages. Microcomputer Architecture. Instruction Execution Cycle. Evolution of programming languages: Machine language - the programmer had to remember the machine codes for various operations, and had to remember the locations of the data in the main memory like: 0101 0011 0111… Assembly Language - an instruction is an easy –to- remember form called a mnemonic code . Example: Assembly Language Machine Language Load 100100 ADD 100101 SUB 100011 We need a program called an assembler that translates the assembly language instructions into machine language. High-level languages Fortran, Cobol, Pascal, C++, C# and java. We need a compiler to translate instructions written in high-level languages into machine code. Microprocessor-based system (Micro computer) Architecture Data Bus, I/O bus Memory Storage I/O I/O Registers Unit Device Device Central Processing Unit #1 #2 (CPU ) ALU CU Clock Control Unit Address Bus The figure shows the main components of a microprocessor-based system: CPU- Central Processing Unit , where calculations and logic operations are done. CPU contains registers , a high-frequency clock , a control unit ( CU ) and an arithmetic logic unit ( ALU ). o Clock : synchronizes the internal operations of the CPU with other system components using clock pulsing at a constant rate (the basic unit of time for machine instructions is a machine cycle or clock cycle) One cycle A machine instruction requires at least one clock cycle some instruction require 50 clocks. o Control Unit (CU) - generate the needed control signals to coordinate the sequencing of steps involved in executing machine instructions: (fetches data and instructions and decodes addresses for the ALU). -
Soft Machines Targets Ipcbottleneck
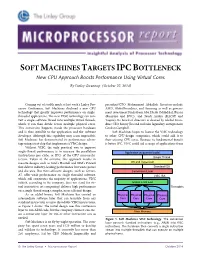
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area. -

Arithmetic and Logical Unit Design for Area Optimization for Microcontroller Amrut Anilrao Purohit 1,2 , Mohammed Riyaz Ahmed 2 and R
et International Journal on Emerging Technologies 11 (2): 668-673(2020) ISSN No. (Print): 0975-8364 ISSN No. (Online): 2249-3255 Arithmetic and Logical Unit Design for Area Optimization for Microcontroller Amrut Anilrao Purohit 1,2 , Mohammed Riyaz Ahmed 2 and R. Venkata Siva Reddy 2 1Research Scholar, VTU Belagavi (Karnataka), India. 2School of Electronics and Communication Engineering, REVA University Bengaluru, (Karnataka), India. (Corresponding author: Amrut Anilrao Purohit) (Received 04 January 2020, Revised 02 March 2020, Accepted 03 March 2020) (Published by Research Trend, Website: www.researchtrend.net) ABSTRACT: Arithmetic and Logic Unit (ALU) can be understood with basic knowledge of digital electronics and any engineer will go through the details only once. The advantage of knowing ALU in detail is two- folded: firstly, programming of the processing device can be efficient and secondly, can design a new ALU architecture as per the various constraints of the use cases. The miniaturization of digital circuits can be achieved by either reducing the size of transistor (Moore’s law) or by optimizing the gate count of the circuit. The first has been explored extensively while the latter has been ignored which deals with the application of Boolean rules and requires sound knowledge of logic design. The ultimate outcome is to have an area optimized architecture/approach that optimizes the circuit at gate level. The design of ALU is for various processing devices varies with the device/system requirements. The area optimization places a significant role in the chip design. Here in this work, we have attempted to design an ALU which is area efficient while being loaded with additional functionality necessary for microcontrollers. -

Unit 8 : Microprocessor Architecture
Unit 8 : Microprocessor Architecture Lesson 1 : Microcomputer Structure 1.1. Learning Objectives On completion of this lesson you will be able to : ♦ draw the block diagram of a simple computer ♦ understand the function of different units of a microcomputer ♦ learn the basic operation of microcomputer bus system. 1.2. Digital Computer A digital computer is a multipurpose, programmable machine that reads A digital computer is a binary instructions from its memory, accepts binary data as input and multipurpose, programmable processes data according to those instructions, and provides results as machine. output. 1.3. Basic Computer System Organization Every computer contains five essential parts or units. They are Basic computer system organization. i. the arithmetic logic unit (ALU) ii. the control unit iii. the memory unit iv. the input unit v. the output unit. 1.3.1. The Arithmetic and Logic Unit (ALU) The arithmetic and logic unit (ALU) is that part of the computer that The arithmetic and logic actually performs arithmetic and logical operations on data. All other unit (ALU) is that part of elements of the computer system - control unit, register, memory, I/O - the computer that actually are there mainly to bring data into the ALU to process and then to take performs arithmetic and the results back out. logical operations on data. An arithmetic and logic unit and, indeed, all electronic components in the computer are based on the use of simple digital logic devices that can store binary digits and perform simple Boolean logic operations. Data are presented to the ALU in registers. These registers are temporary storage locations within the CPU that are connected by signal paths of the ALU. -
Ece585 Lec2.Pdf
ECE 485/585 Microprocessor System Design Lecture 2: Memory Addressing 8086 Basics and Bus Timing Asynchronous I/O Signaling Zeshan Chishti Electrical and Computer Engineering Dept Maseeh College of Engineering and Computer Science Source: Lecture based on materials provided by Mark F. Basic I/O – Part I ECE 485/585 Outline for next few lectures Simple model of computation Memory Addressing (Alignment, Byte Order) 8088/8086 Bus Asynchronous I/O Signaling Review of Basic I/O How is I/O performed Dedicated/Isolated /Direct I/O Ports Memory Mapped I/O How do we tell when I/O device is ready or command complete? Polling Interrupts How do we transfer data? Programmed I/O DMA ECE 485/585 Simplified Model of a Computer Control Control Data, Address, Memory Data Path Microprocessor Keyboard Mouse [Fetch] Video display [Decode] Printer [Execute] I/O Device Hard disk drive Audio card Ethernet WiFi CD R/W DVD ECE 485/585 Memory Addressing Size of operands Bytes, words, long/double words, quadwords 16-bit half word (Intel: word) 32-bit word (Intel: doubleword, dword) 0x107 64-bit double word (Intel: quadword, qword) 0x106 Note: names are non-standard 0x105 SUN Sparc word is 32-bits, double is 64-bits 0x104 0x103 Alignment 0x102 Can multi-byte operands begin at any byte address? 0x101 Yes: non-aligned 0x100 No: aligned. Low order address bit(s) will be zero ECE 485/585 Memory Operand Alignment …Intel IA speak (i.e. word = 16-bits = 2 bytes) 0x107 0x106 0x105 0x104 0x103 0x102 0x101 0x100 Aligned Unaligned Aligned Unaligned Aligned Unaligned word word Double Double Quad Quad address address word word word word -----0 address address address address -----00 ----000 ECE 485/585 Memory Operand Alignment Why do we care? Unaligned memory references Can cause multiple memory bus cycles for a single operand May also span cache lines Requiring multiple evictions, multiple cache line fills Complicates memory system and cache controller design Some architectures restrict addresses to be aligned Even in architectures without alignment restrictions (e.g.