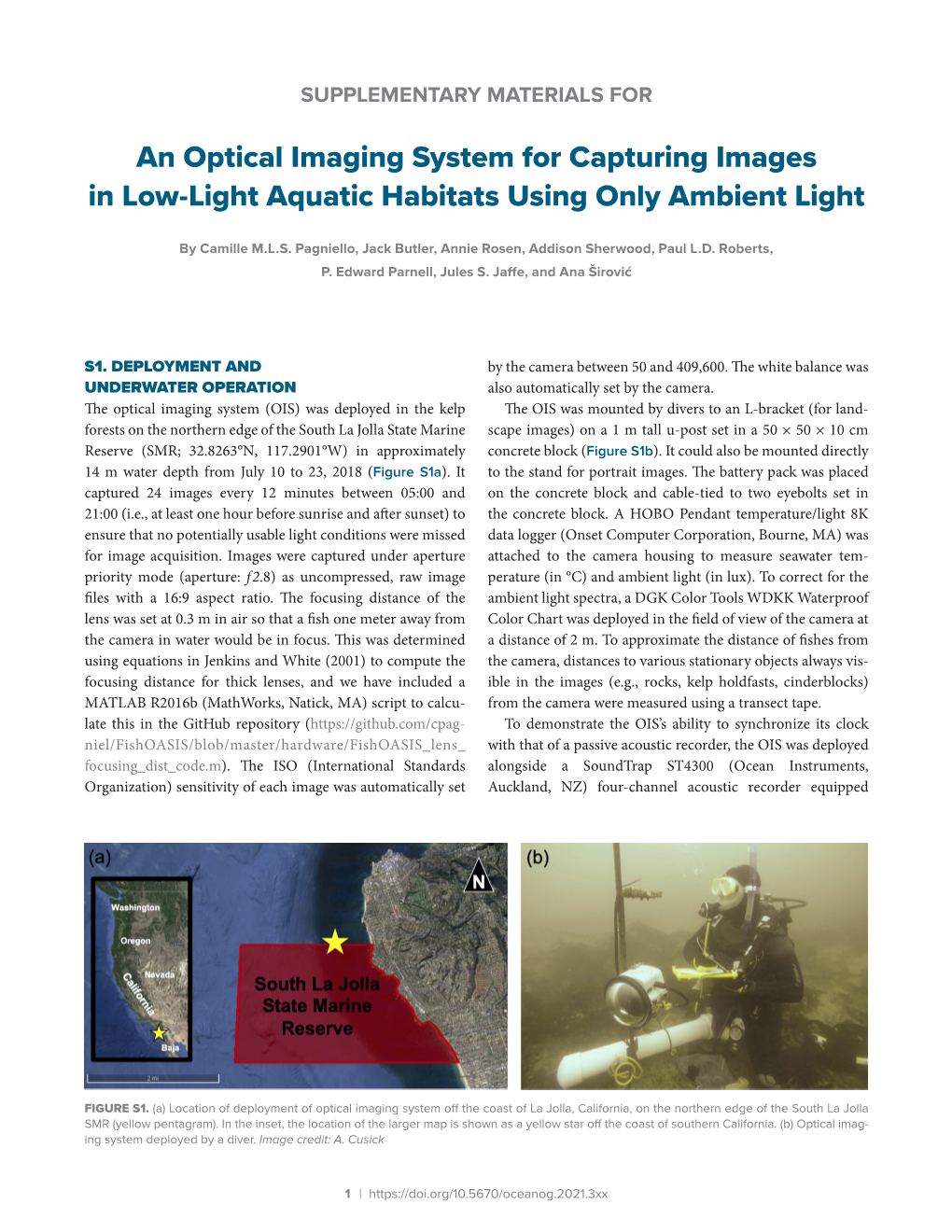
An Optical Imaging System for Capturing Images in Low-Light Aquatic Habitats Using Only Ambient Light
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Marine Ecology Progress Series 477:177
Vol. 477: 177–188, 2013 MARINE ECOLOGY PROGRESS SERIES Published March 12 doi: 10.3354/meps10144 Mar Ecol Prog Ser Larval exposure to shared oceanography does not cause spatially correlated recruitment in kelp forest fishes Jenna M. Krug*, Mark A. Steele Department of Biology, California State University, 18111 Nordhoff St., Northridge, California 91330-8303, USA ABSTRACT: In organisms that have a life history phase whose dispersal is influenced by abiotic forcing, if individuals of different species are simultaneously exposed to the same forcing, spa- tially correlated settlement patterns may result. Such correlated recruitment patterns may affect population and community dynamics. The extent to which settlement or recruitment is spatially correlated among species, however, is not well known. We evaluated this phenomenon among 8 common kelp forest fishes at 8 large reefs spread over 30 km of the coast of Santa Catalina Island, California. In addition to testing for correlated recruitment, we also evaluated the influences of predation and habitat quality on spatial patterns of recruitment. Fish and habitat attributes were surveyed along transects 7 times during 2008. Using these repeated surveys, we also estimated the mortality rate of the prey species that settled most consistently (Oxyjulis californica) and evaluated if mortality was related to recruit density, predator density, or habitat attributes. Spatial patterns of recruitment of the 8 study species were seldom correlated. Recruitment of all species was related to one or more attributes of the habitat, with giant kelp abundance being the most widespread predictor of recruitment. Mortality of O. californica recruits was density-dependent and declined with increasing canopy cover of giant kelp, but was unrelated to predator density. -

CHECKLIST and BIOGEOGRAPHY of FISHES from GUADALUPE ISLAND, WESTERN MEXICO Héctor Reyes-Bonilla, Arturo Ayala-Bocos, Luis E
ReyeS-BONIllA eT Al: CheCklIST AND BIOgeOgRAphy Of fISheS fROm gUADAlUpe ISlAND CalCOfI Rep., Vol. 51, 2010 CHECKLIST AND BIOGEOGRAPHY OF FISHES FROM GUADALUPE ISLAND, WESTERN MEXICO Héctor REyES-BONILLA, Arturo AyALA-BOCOS, LUIS E. Calderon-AGUILERA SAúL GONzáLEz-Romero, ISRAEL SáNCHEz-ALCántara Centro de Investigación Científica y de Educación Superior de Ensenada AND MARIANA Walther MENDOzA Carretera Tijuana - Ensenada # 3918, zona Playitas, C.P. 22860 Universidad Autónoma de Baja California Sur Ensenada, B.C., México Departamento de Biología Marina Tel: +52 646 1750500, ext. 25257; Fax: +52 646 Apartado postal 19-B, CP 23080 [email protected] La Paz, B.C.S., México. Tel: (612) 123-8800, ext. 4160; Fax: (612) 123-8819 NADIA C. Olivares-BAñUELOS [email protected] Reserva de la Biosfera Isla Guadalupe Comisión Nacional de áreas Naturales Protegidas yULIANA R. BEDOLLA-GUzMáN AND Avenida del Puerto 375, local 30 Arturo RAMíREz-VALDEz Fraccionamiento Playas de Ensenada, C.P. 22880 Universidad Autónoma de Baja California Ensenada, B.C., México Facultad de Ciencias Marinas, Instituto de Investigaciones Oceanológicas Universidad Autónoma de Baja California, Carr. Tijuana-Ensenada km. 107, Apartado postal 453, C.P. 22890 Ensenada, B.C., México ABSTRACT recognized the biological and ecological significance of Guadalupe Island, off Baja California, México, is Guadalupe Island, and declared it a Biosphere Reserve an important fishing area which also harbors high (SEMARNAT 2005). marine biodiversity. Based on field data, literature Guadalupe Island is isolated, far away from the main- reviews, and scientific collection records, we pres- land and has limited logistic facilities to conduct scien- ent a comprehensive checklist of the local fish fauna, tific studies. -

Environmental DNA Reveals the Fine-Grained and Hierarchical
www.nature.com/scientificreports OPEN Environmental DNA reveals the fne‑grained and hierarchical spatial structure of kelp forest fsh communities Thomas Lamy 1,2*, Kathleen J. Pitz 3, Francisco P. Chavez3, Christie E. Yorke1 & Robert J. Miller1 Biodiversity is changing at an accelerating rate at both local and regional scales. Beta diversity, which quantifes species turnover between these two scales, is emerging as a key driver of ecosystem function that can inform spatial conservation. Yet measuring biodiversity remains a major challenge, especially in aquatic ecosystems. Decoding environmental DNA (eDNA) left behind by organisms ofers the possibility of detecting species sans direct observation, a Rosetta Stone for biodiversity. While eDNA has proven useful to illuminate diversity in aquatic ecosystems, its utility for measuring beta diversity over spatial scales small enough to be relevant to conservation purposes is poorly known. Here we tested how eDNA performs relative to underwater visual census (UVC) to evaluate beta diversity of marine communities. We paired UVC with 12S eDNA metabarcoding and used a spatially structured hierarchical sampling design to assess key spatial metrics of fsh communities on temperate rocky reefs in southern California. eDNA provided a more‑detailed picture of the main sources of spatial variation in both taxonomic richness and community turnover, which primarily arose due to strong species fltering within and among rocky reefs. As expected, eDNA detected more taxa at the regional scale (69 vs. 38) which accumulated quickly with space and plateaued at only ~ 11 samples. Conversely, the discovery rate of new taxa was slower with no sign of saturation for UVC. -

Vii Fishery-At-A-Glance: California Sheephead
Fishery-at-a-Glance: California Sheephead (Sheephead) Scientific Name: Semicossyphus pulcher Range: Sheephead range from the Gulf of California to Monterey Bay, California, although they are uncommon north of Point Conception. Habitat: Both adult and juvenile Sheephead primarily reside in kelp forest and rocky reef habitats. Size (length and weight): Male Sheephead can grow up to a length of three feet (91 centimeters) and weigh over 36 pounds (16 kilograms). Life span: The oldest Sheephead ever reported was a male at 53 years. Reproduction: As protogynous hermaphrodites, all Sheephead begin life as females, and older, larger females can develop into males. They are batch spawners, releasing eggs and sperm into the water column multiple times during their spawning season from July to September. Prey: Sheephead are generalist carnivores whose diet shifts throughout their growth. Juveniles primarily consume small invertebrates like tube-dwelling polychaetes, bryozoans and brittle stars, and adults shift to consuming larger mobile invertebrates like sea urchins. Predators: Predators of adult Sheephead include Giant Sea Bass, Soupfin Sharks and California Sea Lions. Fishery: Sheephead support both a popular recreational and a commercial fishery in southern California. Area fished: Sheephead are fished primarily south of Point Conception (Santa Barbara County) in nearshore waters around the offshore islands and along the mainland shore over rocky reefs and in kelp forests. Fishing season: Recreational anglers can fish for Sheephead from March 1through December 31 onboard boats south of Point Conception and May 1 through December 31 between Pigeon Point and Point Conception. Recreational divers and shore-based anglers can fish for Sheephead year round. -
2019 Annual Marine Environmental Analysis and Interpretation Report
2019 ANNUAL MARINE ENVIRONMENTAL ANALYSIS AND INTERPRETATION San Onofre Nuclear Generating Station ANNUAL MARINE ENVIRONMENTAL ANALYSIS AND INTERPRETATION San Onofre Nuclear Generating Station July 2020 Page intentionally blank Report Preparation/Data Collection – Oceanography and Marine Biology MBC Aquatic Sciences 3000 Red Hill Avenue Costa Mesa, CA 92626 Page intentionally blank TABLE OF CONTENTS LIST OF FIGURES ........................................................................................................................... iii LIST OF TABLES ...............................................................................................................................v LIST OF APPENDICES ................................................................................................................... vi EXECUTIVE SUMMARY .............................................................................................................. vii CHAPTER 1 STUDY INTRODUCTION AND GENERATING STATION DESCRIPTION 1-1 INTRODUCTION ................................................................................................................... 1-1 PURPOSE OF SAMPLING ......................................................................................... 1-1 REPORT APPROACH AND ORGANIZATION ........................................................ 1-1 DESCRIPTION OF THE STUDY AREA ................................................................... 1-1 HISTORICAL BACKGROUND ........................................................................................... -

Seasonal and Geographical Differences in Cleaner Fish Activity in the Mediterranean Sea
Helgol Mar Res (2002) 55:232–241 DOI 10.1007/s101520100084 ORIGINAL ARTICLE C. Dieter Zander · Ilka Sötje Seasonal and geographical differences in cleaner fish activity in the Mediterranean Sea Received: 17 January 2001 / Received in revised form: 10 August 2001 / Accepted: 10 August 2001 / Published online: 11 October 2001 © Springer-Verlag and AWI 2001 Abstract Investigations into symbioses may be impor- Keywords Cleaner wrasse · Symphodus spp. · tant in order to analyse the grade of stability in ecosys- Symbiosis · Mediterranean Sea · Cleaner activity tems. Host–cleaner relationships were investigated in two localities of the Mediterranean Sea: Giglio (Tuscany, Italy) and Banyuls-sur-Mer (France). The cleaner Introduction wrasse, Symphodus melanocercus, was the main cleaner. Supplementary cleaners, such as the young of several Cleaner fish symbioses are widespread in the sea and wrasses, Symphodus mediterraneus, Symphodus ocella- maybe in fresh water as well (Losey et al. 1999; Zander tus, Symphodus tinca, Coris julis and Ctenolabrus rupes- et al. 1999). This mode of symbiosis represents either tris, are able to help out in times when there is a shortage facultative or obligatory mutualism, or even a type of cleaners. Differences between the localities were ob- of parasitism. In the tropic Indo-Pacific the labrid vious by a greater fish (host) density in Banyuls, which Labroides dimidiatus is an obligatory cleaner fish, whose is probably due to eutrophication and might improve and territories become cleaner stations (Randall 1958); at increase cleaner activities. Regarding two seasons, other localities different fish species can play this spring and late summer, the fishes presented a lower de- role, for instance, the labrid Oxyjulis californicus on gree of activity in Giglio, but a higher one in Banyuls – the American west coast (Hobson 1971), the gobiid in late summer compared with spring. -

Common Fishes of California
COMMON FISHES OF CALIFORNIA Updated July 2016 Blue Rockfish - SMYS Sebastes mystinus 2-4 bands around front of head; blue to black body, dark fins; anal fin slanted Size: 8-18in; Depth: 0-200’+ Common from Baja north to Canada North of Conception mixes with mostly with Olive and Black R.F.; South with Blacksmith, Kelp Bass, Halfmoons and Olives. Black Rockfish - SMEL Sebastes melanops Blue to blue-back with black dots on their dorsal fins; anal fin rounded Size: 8-18 in; Depth: 8-1200’ Common north of Point Conception Smaller eyes and a bit more oval than Blues Olive/Yellowtail Rockfish – OYT Sebastes serranoides/ flavidus Several pale spots below dorsal fins; fins greenish brown to yellow fins Size: 10-20in; Depth: 10-400’+ Midwater fish common south of Point Conception to Baja; rare north of Conception Yellowtail R.F. is a similar species are rare south of Conception, while being common north Black & Yellow Rockfish - SCHR Sebastes chrysomelas Yellow blotches of black/olive brown body;Yellow membrane between third and fourth dorsal fin spines Size: 6-12in; Depth: 0-150’ Common central to southern California Inhabits rocky areas/crevices Gopher Rockfish - SCAR Sebastes carnatus Several small white blotches on back; Pale blotch extends from dorsal spine onto back Size: 6-12 in; Depth: 8-180’ Common central California Inhabits rocky areas/crevice. Territorial Copper Rockfish - SCAU Sebastes caurinus Wide, light stripe runs along rear half on lateral line Size:: 10-16in; Depth: 10-600’ Inhabits rocky reefs, kelpbeds, -

A Checklist of the Fishes of the Monterey Bay Area Including Elkhorn Slough, the San Lorenzo, Pajaro and Salinas Rivers
f3/oC-4'( Contributions from the Moss Landing Marine Laboratories No. 26 Technical Publication 72-2 CASUC-MLML-TP-72-02 A CHECKLIST OF THE FISHES OF THE MONTEREY BAY AREA INCLUDING ELKHORN SLOUGH, THE SAN LORENZO, PAJARO AND SALINAS RIVERS by Gary E. Kukowski Sea Grant Research Assistant June 1972 LIBRARY Moss L8ndillg ,\:Jrine Laboratories r. O. Box 223 Moss Landing, Calif. 95039 This study was supported by National Sea Grant Program National Oceanic and Atmospheric Administration United States Department of Commerce - Grant No. 2-35137 to Moss Landing Marine Laboratories of the California State University at Fresno, Hayward, Sacramento, San Francisco, and San Jose Dr. Robert E. Arnal, Coordinator , ·./ "':., - 'I." ~:. 1"-"'00 ~~ ~~ IAbm>~toriesi Technical Publication 72-2: A GI-lliGKL.TST OF THE FISHES OF TtlE MONTEREY my Jl.REA INCLUDING mmORH SLOUGH, THE SAN LCRENZO, PAY-ARO AND SALINAS RIVERS .. 1&let~: Page 14 - A1estria§.·~iligtro1ophua - Stone cockscomb - r-m Page 17 - J:,iparis'W10pus." Ribbon' snailt'ish - HE , ,~ ~Ei 31 - AlectrlQ~iu.e,ctro1OphUfi- 87-B9 . .', . ': ". .' Page 31 - Ceb1diehtlrrs rlolaCewi - 89 , Page 35 - Liparis t!01:f-.e - 89 .Qhange: Page 11 - FmWulns parvipin¢.rl, add: Probable misidentification Page 20 - .BathopWuBt.lemin&, change to: .Mhgghilu§. llemipg+ Page 54 - Ji\mdJ11ui~~ add: Probable. misidentifioation Page 60 - Item. number 67, authOr should be .Hubbs, Clark TABLE OF CONTENTS INTRODUCTION 1 AREA OF COVERAGE 1 METHODS OF LITERATURE SEARCH 2 EXPLANATION OF CHECKLIST 2 ACKNOWLEDGEMENTS 4 TABLE 1 -

California State University, Northridge
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE RECRUITMENT, GROWTH RATES, PLANKTONIC LARVAL DURATION, AND BEHAVIOR OF THE YOUNG-OF-THE-YEAR OF GIANT SEA BASS, STEREOLEPIS GIGAS, OFF SOUTHERN CALIFORNIA A thesis submitted in partial fulfillment of the requirements for the degree of Masters of Science in Biology By: Stephanie A. Benseman December 2017 The thesis of Stephanie A. Benseman is approved by: __________________________________________ ___________________ Michael P. Franklin, Ph.D. Date __________________________________________ ___________________ Mark A. Steele, Ph.D. Date __________________________________________ ___________________ Advisor: Larry G. Allen, Ph.D., Chair Date California State University, Northridge ii ACKNOWLEDGEMENTS I would like to express my gratitude to the following people for making this research possible. To all my family, friends, and loved ones. To all my diver buddies who braved the cold to help me search for hours for a needle in a haystack. To my Biology girls (Leah, Dani, Beth, and Stacey) for always being there to support me. To Larry Allen for your inspirations, Mike Couffer for your dedication, Mike Franklin for the laughs, Richard Yan for your countless hours of otolith work, Chris Mirabal for your confidence in me, Milton Love for your support, CSUN for your generosity, and just because babies. Thank you all. iii DEDICATION This work is dedicated to my family, who drive me crazy but I love and could not image being the person I am today without them. iv TABLE OF CONTENTS Signature Page ii Acknowledgements iii Dedication iv Abstract v Introduction 1 Methods 7 Results 13 Discussion 17 References 27 Appendix: Figures 34 v Abstract Recruitment, Growth Rates, Planktonic Larval Duration, and Behavior of the Young-of-the-Year of Giant Sea Bass, Stereolepis gigas, off Southern California. -

Guide to the Coastal Marine Fishes of California
STATE OF CALIFORNIA THE RESOURCES AGENCY DEPARTMENT OF FISH AND GAME FISH BULLETIN 157 GUIDE TO THE COASTAL MARINE FISHES OF CALIFORNIA by DANIEL J. MILLER and ROBERT N. LEA Marine Resources Region 1972 ABSTRACT This is a comprehensive identification guide encompassing all shallow marine fishes within California waters. Geographic range limits, maximum size, depth range, a brief color description, and some meristic counts including, if available: fin ray counts, lateral line pores, lateral line scales, gill rakers, and vertebrae are given. Body proportions and shapes are used in the keys and a state- ment concerning the rarity or commonness in California is given for each species. In all, 554 species are described. Three of these have not been re- corded or confirmed as occurring in California waters but are included since they are apt to appear. The remainder have been recorded as occurring in an area between the Mexican and Oregon borders and offshore to at least 50 miles. Five of California species as yet have not been named or described, and ichthyologists studying these new forms have given information on identification to enable inclusion here. A dichotomous key to 144 families includes an outline figure of a repre- sentative for all but two families. Keys are presented for all larger families, and diagnostic features are pointed out on most of the figures. Illustrations are presented for all but eight species. Of the 554 species, 439 are found primarily in depths less than 400 ft., 48 are meso- or bathypelagic species, and 67 are deepwater bottom dwelling forms rarely taken in less than 400 ft. -

UC Santa Barbara Dissertation Template
UNIVERSITY OF CALIFORNIA Santa Barbara The effects of parasites on the kelp-forest food web A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Ecology, Evolution and Marine Biology by Dana Nicole Morton Committee in charge: Professor Armand M. Kuris, Chair Professor Mark H. Carr, UCSC Professor Douglas J. McCauley Dr. Kevin D. Lafferty, USGS/Adjunct Professor March 2020 The dissertation of Dana Nicole Morton is approved. ____________________________________________ Mark H. Carr ____________________________________________ Douglas J. McCauley ____________________________________________ Kevin D. Lafferty ____________________________________________ Armand M. Kuris, Committee Chair March 2020 The effects of parasites on the kelp-forest food web Copyright © 2020 by Dana Nicole Morton iii ACKNOWLEDGEMENTS I did not complete this work in isolation, and first express my sincerest thanks to many undergraduate volunteers: Cristiana Antonino, Glen Banning, Farallon Broughton, Allison Clatch, Melissa Coty, Lauren Dykman, Christian Franco, Nora Frank, Ali Gomez, Kaylyn Harris, Sam Herbert, Adolfo Hernandez, Nicky Huang, Michael Ivie, Conner Jainese, Charlotte Picque, Kristian Rassaei, Mireya Ruiz, Deena Saad, Veronica Torres, Savanah Tran, and Zoe Zilz. I would also like to thank Ralph Appy, Bob Miller, Clint Nelson, Avery Parsons, Christoph Pierre, and Christian Orsini for donating specimens to this project and supporting my own sample collection. I also thank Jim Carlton, Milton Love, David Marcogliese, John McLaughlin, and Christoph Pierre for sharing their expertise in thoughtful discussions on this work. The quality of this work would have suffered without assistance on parasite identification from Ralph Appy, Francisco Aznar, Janine Caira, Willy Hemmingsen, Ken Mackenzie, Harry Palm, Julli Passarelli, Mark Rigby, and Danny Tang. -

Conservation Diver Course
Conservation Diver Course Conservation Diver Course 1 Inhoud 1 Introduction ..................................................................................................................................... 5 2 Taxonomy ........................................................................................................................................ 7 2.1 Introduction ..................................................................................................................................... 7 2.2 What is taxonomy? .......................................................................................................................... 8 2.3 A brief history of taxonomy ............................................................................................................. 9 2.4 Scientific names ............................................................................................................................. 10 2.5 The hierarchical system of classification ....................................................................................... 12 2.5.1 Species ................................................................................................................................... 13 2.5.2 Genus ..................................................................................................................................... 13 2.5.3 Family .................................................................................................................................... 14 2.5.4 Order ....................................................................................................................................