Full-Waveform Inversion of Gpr Data from the Thur River Aquifer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
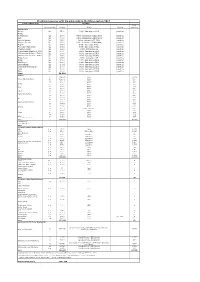
Stocking Measures with Big Salmonids in the Rhine System 2017
Stocking measures with big salmonids in the Rhine system 2017 Country/Water body Stocking smolt Kind and stage Number Origin Marking equivalent Switzerland Wiese Lp 3500 Petite Camargue B1K3 genetics Rhine Riehenteich Lp 1.000 Petite Camargue K1K2K4K4a genetics Birs Lp 4.000 Petite Camargue K1K2K4K4a genetics Arisdörferbach Lp 1.500 Petite Camargue F1 Wild genetics Hintere Frenke Lp 2.500 Petite Camargue K1K2K4K4a genetics Ergolz Lp 3.500 Petite Camargue K7C1 genetics Fluebach Harbotswil Lp 1.300 Petite Camargue K7C1 genetics Magdenerbach Lp 3.900 Petite Camargue K5 genetics Möhlinbach (Bachtele, Möhlin) Lp 600 Petite Camargue B7B8 genetics Möhlinbach (Möhlin / Zeiningen) Lp 2.000 Petite Camargue B7B8 genetics Möhlinbach (Zuzgen, Hellikon) Lp 3.500 Petite Camargue B7B8 genetics Etzgerbach Lp 4.500 Petite Camargue K5 genetics Rhine Lp 1.000 Petite Camargue B2K6 genetics Old Rhine Lp 2.500 Petite Camargue B2K6 genetics Bachtalbach Lp 1.000 Petite Camargue B2K6 genetics Inland canal Klingnau Lp 1.000 Petite Camargue B2K6 genetics Surb Lp 1.000 Petite Camargue B2K6 genetics Bünz Lp 1.000 Petite Camargue B2K6 genetics Sum 39.300 France L0 269.147 Allier 13457 Rhein (Alt-/Restrhein) L0 142.000 Rhine 7100 La 31.500 Rhine 3150 L0 5.000 Rhine 250 Doller La 21.900 Rhine 2190 L0 2.500 Rhine 125 Thur La 12.000 Rhine 1200 L0 2.500 Rhine 125 Lauch La 5.000 Rhine 500 Fecht und Zuflüsse L0 10.000 Rhine 500 La 39.000 Rhine 3900 L0 4.200 Rhine 210 Ill La 17.500 Rhine 1750 Giessen und Zuflüsse L0 10.000 Rhine 500 La 28.472 Rhine 2847 L0 10.500 Rhine 525 -

Karte Der Erdbebenzonen Und Geologischen Untergrundklassen
Karte der Erdbebenzonen und geologischen Untergrundklassen 350 000 KARTE DER ERDBEBENZONEN UND GEOLOGISCHEN UNTERGRUNDKLASSEN FÜR BADEN-WÜRTTEMBERG 1: für Baden-Württemberg 10° 1 : 350 000 9° BAYERN 8° HESSEN RHEINLAND- PFALZ WÜRZBUR G Die Karte der Erdbebenzonen und geologischen Untergrundklassen für Baden- Mainz- Groß- Main-Spessart g Wertheim n Württemberg bezieht sich auf DIN 4149:2005-04 "Bauten in deutschen Darmstadt- li Gerau m Bingen m Main Kitzingen – Lastannahmen, Bemessung und Ausführung üblicher Freudenberg Erdbebengebieten Mü Dieburg Ta Hochbauten", herausgegeben vom DIN Deutsches Institut für Normung e.V.; ub Kitzingen EIN er Burggrafenstr. 6, 10787 Berlin. RH Alzey-Worms Miltenberg itz Die Erdbebenzonen beruhen auf der Berechnung der Erdbebengefährdung auf Weschn Odenwaldkreis Main dem Niveau einer Nicht-Überschreitenswahrscheinlichkeit von 90 % innerhalb Külsheim Werbach Großrinderfeld Erbach Würzburg von 50 Jahren für nachfolgend angegebene Intensitätswerte (EMS-Skala): Heppenheim Mud Pfrimm Bergst(Bergstraraßeß) e Miltenberg Gebiet außerhalb von Erdbebenzonen Donners- WORMS Tauberbischofsheim Königheim Grünsfeld Wittighausen Gebiet sehr geringer seismischer Gefährdung, in dem gemäß Laudenbach Hardheim des zugrunde gelegten Gefährdungsniveaus rechnerisch die bergkreis Höpfingen Hemsbach Main- Intensität 6 nicht erreicht wird Walldürn zu Golla Bad ch Aisch Lauda- Mergentheim Erdbebenzone 0 Weinheim Königshofen Neustadt Gebiet, in dem gemäß des zugrunde gelegten Gefährdungsniveaus Tauber-Kreis Mudau rechnerisch die Intensitäten 6 bis < 6,5 zu erwarten sind FRANKENTHAL Buchen (Odenwald) (Pfalz) Heddes-S a. d. Aisch- Erdbebenzone 1 heim Ahorn RHirschberg zu Igersheim Gebiet, in dem gemäß des zugrunde gelegten Gefährdungsniveaus an der Bergstraße Eberbach Bad MANNHEIM Heiligkreuz- S c Ilves- steinach heff Boxberg Mergentheim rechnerisch die Intensitäten 6,5 bis < 7 zu erwarten sind Ladenburg lenz heim Schriesheim Heddesbach Weikersheim Bad Windsheim LUDWIGSHAFEN Eberbach Creglingen Wilhelmsfeld Laxb Rosenberg Erdbebenzone 2 a. -

Quaternary Glaciation History of Northern Switzerland
Quaternary Science Journal GEOzOn SCiEnCE MEDiA Volume 60 / number 2–3 / 2011 / 282–305 / DOi 10.3285/eg.60.2-3.06 iSSn 0424-7116 E&G www.quaternary-science.net Quaternary glaciation history of northern switzerland Frank Preusser, Hans Rudolf Graf, Oskar keller, Edgar krayss, Christian Schlüchter Abstract: A revised glaciation history of the northern foreland of the Swiss Alps is presented by summarising field evidence and chronologi- cal data for different key sites and regions. The oldest Quaternary sediments of Switzerland are multiphase gravels intercalated by till and overbank deposits (‘Deckenschotter’). Important differences in the base level within the gravel deposits allows the distin- guishing of two complex units (‘Höhere Deckenschotter’, ‘Tiefere Deckenschotter’), separated by a period of substantial incision. Mammal remains place the older unit (‘Höhere Deckenschotter’) into zone MN 17 (2.6–1.8 Ma). Each of the complexes contains evidence for at least two, but probably up-to four, individual glaciations. In summary, up-to eight Early Pleistocene glaciations of the Swiss alpine foreland are proposed. The Early Pleistocene ‘Deckenschotter’ are separated from Middle Pleistocene deposition by a time of important erosion, likely related to tectonic movements and/or re-direction of the Alpine Rhine (Middle Pleistocene Reorganisation – MPR). The Middle-Late Pleistocene comprises four or five glaciations, named Möhlin, Habsburg, Hagenholz (uncertain, inadequately documented), Beringen, and Birrfeld after their key regions. The Möhlin Glaciation represents the most extensive glaciation of the Swiss alpine foreland while the Beringen Glaciation had a slightly lesser extent. The last glacial cycle (Birrfeld Glaciation) probably comprises three independent glacial advances dated to ca. -

Rare Earth Elements As Emerging Contaminants in the Rhine River, Germany and Its Tributaries
Rare earth elements as emerging contaminants in the Rhine River, Germany and its tributaries by Serkan Kulaksız A thesis submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Geochemistry Approved, Thesis Committee _____________________________________ Prof. Dr. Michael Bau, Chair Jacobs University Bremen _____________________________________ Prof. Dr. Andrea Koschinsky Jacobs University Bremen _____________________________________ Dr. Dieter Garbe-Schönberg Universität Kiel Date of Defense: June 7th, 2012 _____________________________________ School of Engineering and Science TABLE OF CONTENTS CHAPTER I – INTRODUCTION 1 1. Outline 1 2. Research Goals 4 3. Geochemistry of the Rare Earth Elements 6 3.1 Controls on Rare Earth Elements in River Waters 6 3.2 Rare Earth Elements in Estuaries and Seawater 8 3.3 Anthropogenic Gadolinium 9 3.3.1 Controls on Anthropogenic Gadolinium 10 4. Demand for Rare Earth Elements 12 5 Rare Earth Element Toxicity 16 6. Study Area 17 7. References 19 Acknowledgements 28 CHAPTER II – SAMPLING AND METHODS 31 1. Sample Preparation 31 1.1 Pre‐concentration 32 2. Methods 34 2.1 HCO3 titration 34 2.2 Ion Chromatography 34 2.3 Inductively Coupled Plasma – Optical Emission Spectrometer 35 2.4 Inductively Coupled Plasma – Mass Spectrometer 35 2.4.1 Method reliability 36 3. References 41 CHAPTER III – RARE EARTH ELEMENTS IN THE RHINE RIVER, GERMANY: FIRST CASE OF ANTHROPOGENIC LANTHANUM AS A DISSOLVED MICROCONTAMINANT IN THE HYDROSPHERE 43 Abstract 44 1. Introduction 44 2. Sampling sites and Methods 46 2.1 Samples 46 2.2 Methods 46 2.3 Quantification of REE anomalies 47 3. Results and Discussion 48 4. -

Internationally Coordinated Management Plan 2015 for the International River Basin District of the Rhine
Internationally Coordinated Management Plan 2015 for the International River Basin District of the Rhine (Part A = Overriding Part) December 2015 Imprint Joint report of The Republic of Italy, The Principality of Liechtenstein, The Federal Republic of Austria, The Federal Republic of Germany, The Republic of France, The Grand Duchy of Luxemburg, The Kingdom of Belgium, The Kingdom of the Netherlands With the cooperation of the Swiss Confederation Data sources Competent Authorities in the Rhine river basin district Coordination Rhine Coordination Committee in cooperation with the International Commission for the Protection of the Rhine (ICPR) Drafting of maps Federal Institute of Hydrology, Koblenz, Germany Publisher: International Commission for the Protection of the Rhine (ICPR) Kaiserin-Augusta-Anlagen 15, D 56068 Koblenz P.O. box 20 02 53, D 56002 Koblenz Telephone +49-(0)261-94252-0, Fax +49-(0)261-94252-52 Email: [email protected] www.iksr.org Translation: Karin Wehner ISBN 978-3-941994-72-0 © IKSR-CIPR-ICBR 2015 IKSR CIPR ICBR Bewirtschaftungsplan 2015 IFGE Rhein Contents Introduction .................................................................................. 6 1. General description .............................................................. 8 1.1 Surface water bodies in the IRBD Rhine ................................................. 11 1.2 Groundwater ...................................................................................... 12 2. Human activities and stresses .......................................... -

Case Study Rhine
International Commission for the Hydrology of the Rhine Basin Erosion, Transport and Deposition of Sediment - Case Study Rhine - Edited by: Manfred Spreafico Christoph Lehmann National coordinators: Alessandro Grasso, Switzerland Emil Gölz, Germany Wilfried ten Brinke, The Netherlands With contributions from: Jos Brils Martin Keller Emiel van Velzen Schälchli, Abegg & Hunzinger Hunziker, Zarn & Partner Contribution to the International Sediment Initiative of UNESCO/IHP Report no II-20 of the CHR International Commission for the Hydrology of the Rhine Basin Erosion, Transport and Deposition of Sediment - Case Study Rhine - Edited by: Manfred Spreafico Christoph Lehmann National coordinators: Alessandro Grasso, Switzerland Emil Gölz, Germany Wilfried ten Brinke, The Netherlands With contributions from: Jos Brils Martin Keller Emiel van Velzen Schälchli, Abegg & Hunzinger Hunziker, Zarn & Partner Contribution to the International Sediment Initiative of UNESCO/IHP Report no II-20 of the CHR © 2009, KHR/CHR ISBN 978-90-70980-34-4 Preface „Erosion, transport and deposition of sediment“ Case Study Rhine ________________________________________ Erosion, transport and deposition of sediment have significant economic, environmental and social impacts in large river basins. The International Sediment Initiative (ISI) of UNESCO provides with its projects an important contribution to sustainable sediment and water management in river basins. With the processing of exemplary case studies from large river basins good examples of sediment management prac- tices have been prepared and successful strategies and procedures will be made accessible to experts from other river basins. The CHR produced the “Case Study Rhine” in the framework of ISI. Sediment experts of the Rhine riparian states of Switzerland, Austria, Germany and The Netherlands have implemented their experiences in this publication. -

Analysis of Overdeepened Valleys Using the Digital Elevation Model of the Bedrock Surface of Northern Switzerland
Swiss J Geosci (2010) 103:375–384 DOI 10.1007/s00015-010-0043-z Analysis of overdeepened valleys using the digital elevation model of the bedrock surface of Northern Switzerland Peter Jordan Received: 6 March 2008 / Accepted: 7 June 2010 / Published online: 30 November 2010 Ó Swiss Geological Society 2010 Abstract Based on surface and borehole information, are divided into several sub-basins, indicating a multiphase together with pre-existing regional and local interpretations, evolution of the valleys. Some of the swells or barriers a 7,150 square kilometre Raster Digital Elevation Model separating the sub-basins coincide with known late LGM (DEM) of the bedrock surface of northern Switzerland was retreat stages. In the Suhre valley, an old fluvial valley floor constructed using a 25 m cell size. This model represents a with restricted overdeepened sections is documented. further important step in the understanding of Quaternary sediment distribution and is open to a broad field of appli- Keywords Quaternary cover Á Bedrock surface Á cation and analysis, including hydrogeological, geotech- Overdeepened valleys Á DEM Á GIS nical and geophysical studies as well as research in the field of Pleistocene landscape evolution. An analysis of the overdeepened valleys in the whole model area and, more Introduction specifically in the Reuss area, shows that, in most cases, overdeepening is restricted to the areas covered by the Last Motivation Glaciation Maximum (LGM). However, at various locations relatively narrow overdeepened valleys outreach the tongue A well established knowledge of the bedrock surface basins and the LGM ice shield limits. Therefore, an earlier geometry and the thickness and spatial distribution of and further-reaching glacial event has probably contributed unconsolidated rock is of fundamental interest for a wide significantly to the overdeepening of these valleys. -

Reconstruction of Flood Events Based on Documentary Data And
Hydrol. Earth Syst. Sci., 19, 4149–4164, 2015 www.hydrol-earth-syst-sci.net/19/4149/2015/ doi:10.5194/hess-19-4149-2015 © Author(s) 2015. CC Attribution 3.0 License. Reconstruction of flood events based on documentary data and transnational flood risk analysis of the Upper Rhine and its French and German tributaries since AD 1480 I. Himmelsbach1, R. Glaser1, J. Schoenbein1, D. Riemann1, and B. Martin2 1Physical Geography, Albert-Ludwigs Universität Freiburg, Freiburg, Germany 2CRESAT, University of Haut-Alsace, Mulhouse, France Correspondence to: J. Schoenbein ([email protected]) Received: 1 December 2014 – Published in Hydrol. Earth Syst. Sci. Discuss.: 7 January 2015 Revised: 11 September 2015 – Accepted: 23 September 2015 – Published: 14 October 2015 Abstract. This paper presents the long-term analysis of flood the small rivers in Alsace compared to those on the Baden occurrence along the southern part of the Upper Rhine River side – an interesting fact – especially if the modern European system and of 14 of its tributaries in France and Germany Flood directive is taken into account. covering the period starting from 1480 BC. Special focus is given on the temporal and spatial variations of flood events and their underlying meteorological causes over time. Ex- 1 Introduction amples are presented of how long-term information about flood events and knowledge about the historical aspect of The knowledge about the occurrence of floods in histori- flood protection in a given area can help to improve the un- cal times, their meteorological causes and their distribution derstanding of risk analysis and therefor transnational risk within the (hydrological) year does provide a deeper under- management. -
Tracer Studies of River-Groundwater Interaction Under Hydropeaking Conditions
Tracer Studies of River-Groundwater Interaction under Hydropeaking Conditions Dissertation Markus W. Fette 2 Dissertation ETH Nr. 16103 Tracer Studies of River-Groundwater Interaction under Hydropeaking Conditions A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZURICH for the degree of DOCTOR OF NATURAL SCIENCES presented by MARKUS WOLFGANG FETTE Dipl.-Ing., University of Stuttgart born on September 12, 1973 citizen of Germany accepted on recommendation of Prof. Dr. Bernhard Wehrli, examiner Prof. Dr. Pierre Perrochet, co-examiner Prof. Dr. Anton Schleiss, co-examiner Zürich 2005 3 4 Was den Menschen angeht, so glaube ich an das Individuum, nicht aber an den Individualismus. Was die Natur angeht, so glaube ich an das sinnvolle Zusammenspiel ihrer schöpferischen und zerstörerischen Kräfte, nicht aber an deren Manipulierbarkeit zu eigennützigen Zwecken. Was die Musik angeht, so glaube ich an die Töne, nicht aber an die Noten. Was das Geld angeht, so glaube ich an Münzen und Noten und sonst an gar nichts. Was die ewige Liebe angeht, so glaube ich an ihre fortdauernde Renovierbarkeit, nicht aber an ihre Konservierbarkeit. Was die Religion angeht, so glaube ich an Erfahrung, nicht aber an Überzeugungen. Was Antworten auf die letzten Fragen angeht, so glaube ich an den Gedankenstrich, nicht aber an das Ausrufezeichen. Balts Nill, Musiker (Stiller Has) 5 6 Table of Contents T. Table of Contents.......................................................................... 7 A. Acknowledgements ................................................................... -

Flood Risk Along the Upper Rhine Since AD 1480
Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | Hydrol. Earth Syst. Sci. Discuss., 12, 177–211, 2015 www.hydrol-earth-syst-sci-discuss.net/12/177/2015/ doi:10.5194/hessd-12-177-2015 © Author(s) 2015. CC Attribution 3.0 License. This discussion paper is/has been under review for the journal Hydrology and Earth System Sciences (HESS). Please refer to the corresponding final paper in HESS if available. Flood risk along the upper Rhine since AD 1480 I. Himmelsbach1, R. Glaser1, J. Schoenbein1, D. Riemann1, and B. Martin2 1Physical Geography, Albert-Ludwigs-University Freiburg, Germany 2CRESAT, University of Haut-Alsace, Mulhouse, France Received: 1 December 2014 – Accepted: 9 December 2014 – Published: 7 January 2015 Correspondence to: J. Schoenbein ([email protected]) Published by Copernicus Publications on behalf of the European Geosciences Union. 177 Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | Abstract This paper presents the occurrence, cause and frequency changes of floods, their development and distribution along the southern part of the upper Rhine River and of 14 of its tributaries in France and Germany covering the period from 1480 BC. Special 5 focus is given on the temporal and spatial variations and underlying meteorological causes which show a significant change over space and time. Examples are presented how long-term information can help to improve transnational risk and risk management analysis while connecting single historical and modern extreme events. 1 Introduction 10 The knowledge about the occurrence of floods in historical times, their meteorologi- cal causes and their distribution within the (hydrological) year does provide a deeper understanding of the natural variability of the severity of flood events by providing long- term knowledge about changes in the causes, frequencies and gravities of the floods. -
Intergovernmental Perspective, 1991, V.17 No.4
‘commission_ ment in which the Congress declares ists don’t even have to be so clever in everything to be of national interest, fashioning a constitutional justification and then requires the states and lucal because the Supreme Court threw up governments to raise the money and its hands and said to the Congress, do perform the mandates under threat of what you want to do. The Com’t con- civil and, often, criminal annctions. cluded that the Tenth Amendment of- The Constitution has been amend- fers no guidance on where to draw the ed a thousand times over without the line between federal and state power, need to use the cumbersome, constitu- and that the only avenue left for main- tionally provided, amendment process. taining some balance among the gov- The Congress. the Administration, and ernments in our federal system is the courts have ignored the admoni- through the election process. tion of Chief Justice Roger B. “Ikney For the Congress, the end now who said, “If we are at liberty to give old justifies the means, and the Tenth words new meanings—there is no pow- Amendment is dead. When Justice States and cities are having in- er which may not by this mode of con- Robert H. Jackson, in Youn@/own v. creasing difficulty finding the funds struction, be conferred on the general Smvyer (1952), involving President Tru- to provide traditional services and facili- government and denied to the states.” man’s steel plant takeover, stated that ‘Ilrough the Constitution, the states ties —plice, fire, educntion, and tiras- “necessity knows no law,” he was right. -
Rtllq Rer,L N T ~Red 1 N Lie1/~
AJ,PHAllF.TICAJ, I,lIlT "F BI RTllq Rer,l n t ~red 1 n lIe1/~. en f or the Yeo.r 1919 ·-~---------'---~~------B-(-O-on-t-.-) -- r:. - (oont) _c_ (oent.) --P- D'InnooAnze. Paele 11761 , (q.b~ta:jf:·fe"']!,~ii #~~~ Brine. 0onAtlln~e I,ouloe 11812 Ceffin.r.ladya EIAie #549 587 828 DipI1.squ'lle. An tonio 356 I Abbott. ~obert cuoker 586 Bredriok. ~hirlcy norethy r.ognwell. Jehn Alfred Jr ]1i'laatll. Eleanor Angela 324 'I 339 14 Ac~ettullo.Leonllrdo Antoni0696 Rrooka. Arthur'lernllrd Cehen. ~ylvia Beatrioe D1Zaoomo. Mary 480 AdamA. J,I111an FranaeR 474 llrookA. Pl1ul JT 156 cole. Oarl F.dlAen 515 906 Dodge. Gardner Murray 162 Ad'tmo. Rioho.rd Phillip 450 Brothera. Alioe Josephine Cole. Esther Winifred 291 Dedge. lIatlllie 373 Adoook.r,eerge Vlll11am 75 BreNn. Ann Hayward 684 Coleman. J.ouine 400 Dehorty. Jumeo Frllnois 235 \ Al'.l'y, 1lar.dy Rmith 209 Bro'"n. AUDtln CowleD .Tr 438 Collelli. Maria Oonatanza 27 Delan. James Anthony 129 ~Ahllronian. Sara" 385,. -own. Chllrlee Frederiek h 891 Celline. Anna Margaret 83 Donahue. William Hareld 300 Albllno. '!'rnnk .ToBoph 795:!h own. ~or""lia 1'I00ttan 831 Collins. Elaie 136 Donlan. Edward 62 Allp.~. o,h~rlee 7heo~ ere 554 Bro'lln. nore 'hy Leuine 434 Cellin". Riohard 629 Donnelly. :tildred Virginia 641 Allen.,Teremla;' !!ervln Jr 925 Bre'lln. ;furiel Fnrn~'IIorth 318 celllns. Virginia 33 Dorney. William Andre'll Jr 145 796 A11M. lIoel 807 Bre'lIn, Peter Crosby Cellins. Will lam Henry 451 Downey. Charles Fredr1~k 391 18 Allle.