Application and Utility of a Low-Cost Unmanned Aerial System to Manage and Conserve Aquatic Resources in Four Texas Rivers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Trip from Texas to Colorado - Spring 2006 by Sylvia R
Trip from Texas to Colorado - Spring 2006 by Sylvia R. Gallagher Part 3 Sun., April 9, 2006 Goose Island State Park, north of Rockport, TX No entry. 9:15 p.m., Mon., April 10, 2006 Goose Island State Park, TX We didn't get away from Adolph Thomae Park until around 11:00. We stopped for lunch in Raymondville and got here around 4:00. The drive was tedious, mostly through the King Ranch, then through various agricultural areas and the outskirts of generic-looking towns. We were thrilled to discover that our favorite site, #103, was available. They'd only let us take it for two nights, pending reservations that might kick us out. We had to come back this morning to find out. Then they let us have it through Wed. night, which was what we wanted. I really don't understand their system, and I don't think they do either, for it seems to be interpreted differently at every state park. When we drove to the site, we found the people who had been there the night before had not left yet, despite the 2:00 checkout time. They said they'd be out in ten minutes, so we drove out to the waterfront area to see if there were any shorebirds. There weren't, but the tide was pretty high and the place had seen hordes of Sunday visitors. A flamingo, supposedly countable, has been in Copano Bay, and someone told us it could be seen from the tour boats. When I looked in the office at the notebook of interesting bird sightings, I discovered it had been seen from the fishing pier a few days ago. -

Texas Hurricane History
Texas Hurricane History David Roth National Weather Service Camp Springs, MD Table of Contents Preface 3 Climatology of Texas Tropical Cyclones 4 List of Texas Hurricanes 8 Tropical Cyclone Records in Texas 11 Hurricanes of the Sixteenth and Seventeenth Centuries 12 Hurricanes of the Eighteenth and Early Nineteenth Centuries 13 Hurricanes of the Late Nineteenth Century 16 The First Indianola Hurricane - 1875 21 Last Indianola Hurricane (1886)- The Storm That Doomed Texas’ Major Port 24 The Great Galveston Hurricane (1900) 29 Hurricanes of the Early Twentieth Century 31 Corpus Christi’s Devastating Hurricane (1919) 38 San Antonio’s Great Flood – 1921 39 Hurricanes of the Late Twentieth Century 48 Hurricanes of the Early Twenty-First Century 68 Acknowledgments 74 Bibliography 75 Preface Every year, about one hundred tropical disturbances roam the open Atlantic Ocean, Caribbean Sea, and Gulf of Mexico. About fifteen of these become tropical depressions, areas of low pressure with closed wind patterns. Of the fifteen, ten become tropical storms, and six become hurricanes. Every five years, one of the hurricanes will become reach category five status, normally in the western Atlantic or western Caribbean. About every fifty years, one of these extremely intense hurricanes will strike the United States, with disastrous consequences. Texas has seen its share of hurricane activity over the many years it has been inhabited. Nearly five hundred years ago, unlucky Spanish explorers learned firsthand what storms along the coast of the Lone Star State were capable of. Despite these setbacks, Spaniards set down roots across Mexico and Texas and started colonies. Galleons filled with gold and other treasures sank to the bottom of the Gulf, off such locations as Padre and Galveston Islands. -

[ ~ Floods in Central Texas, August 1978
Floods in Central Texas, August 1978 - rt • -r .- r .,.... ... :-< ~ i'f tit ""' • f:• .... .!..J ~ 'tc.J· .... ''.' t r [ ~ U.S. GEOLOGICAL SURVEY ::;;: ?l Open-File Report 79-682 0.. 0.. (1) :::: ~ I I 'Tl ~ 0 0 ... - 0.. V> . ~R_AI.!J}ALL _ 1-'• ::s (") (1) ::s .,rt - ?l ! ~ (/) 20 w ~ u z V> rt Prepared in cooperation with the State of Texas and other agencia Cover photograph, Brazos River in flood at Graham, by Randy Black, Dallas, Texas. Floods in Central Texas, August 1978 By E.E. Schroeder, B.C. Massey, and Kidd M. Waddell U.S. GEOLOGICAL SURVEY Open-File Report 79-682 Prepared in cooperation with the State of Texas and other agencies April 1979 Reproduced by the Texas Department of Water Resources as part of the continuing program of cooperation in water-resources investigations between the Department of Water Resources and the U.S. Geological Survey. Copies of this report may be obtained from the U.S. Geological Survey Federal Building 300 East 8th Street Austin, TX 78701 CONTENTS Page Abstract---------------------------------------------------------- 1 Introduction-----------------------------.------------------------- 2 Purpose and scope of this report----------------------------- 2 Definitions of terms and abbreviations----------------------- 2 Metric conversions------------------------------------------- 3 Description of the storm-----------~------------------------------ 3 Description of the floods----------------------------------------- 4 Nueces River basin------------------------------------------- 4 Guadalupe River -

Floods in Central Texas, August 1-4, 1978
Floods in Central Texas, August 1-4, 1978 .S. GEOLOC?! G AI, « 'im V E Y, P R O t KS SI 0 N A ^ PAPER Bjeporfprepared faintly hj? the" U*& Geologi the Nati&nafe Oceanic ancLAfniosphevic Ad^i^tra Floods in Central Texas, August 1-4, 1978 By E. E. SCHROEDER and B. C. MASSEY, U.S. Geological Survey, and EDWIN H. CHIN, National Weather Service, National Oceanic and Atmospheric Administration U. S. GEOLOGICAL SURVEY PROFESSIONAL PAPER 1332 Report prepared jointly by the U.S. Geological Survey and the National Oceanic and Atmospheric Administration UNITED STATESGOVERNMENTPRINTINGOFFICE, WASHINGTON : 1987 DEPARTMENT OF THE INTERIOR DONALD PAUL HODEL, Secretary U.S. GEOLOGICAL SURVEY Dallas L. Peck, Director Library of Congress Cataloging in Publication Data Schroeder, E. E. Floods in central Texas, August 1-4, 1978. (Geological Survey professional paper ; 1332) "Report prepared jointly by the U.S. Geological Survey and the National Oceanic and Atmospheric Administration." Bibliography: p. Supt. of Docs, no.: I 19.16:1332 1. Floods-Texas. I. Massey, B.C. II. Chin, Edwin H. III. Geological Survey (U.S.) IV. United States. National Oceanic and Atmospheric Administration V. Title. VI. Series. GB1399.4.T4S35 1985 551.48'9'09764 84-600154 For sale by the Books and Open-File Reports Section U.S. Geological Survey Federal Center Box 25425 Denver, CO 80225 CONTENTS Page Abstract .............................................................. 1 Introduction ........................................................... 1 Meteorological settings and precipitation -

Guadalupe, San Antonio, Mission, and Aransas Rivers and Mission, Copano, Aransas, and San Antonio Bays Basin and Bay Area Stakeholders Committee
Guadalupe, San Antonio, Mission, and Aransas Rivers and Mission, Copano, Aransas, and San Antonio Bays Basin and Bay Area Stakeholders Committee May 25, 2012 Guadalupe, San Antonio, Mission, & Aransas Rivers and Mission, Copano, Aransas, & San Antonio Bays Basin & Bay Area Stakeholders Committee (GSA BBASC) Work Plan for Adaptive Management Preliminary Scopes of Work May 25, 2012 May 10, 2012 The Honorable Troy Fraser, Co-Presiding Officer The Honorable Allan Ritter, Co-Presiding Officer Environmental Flows Advisory Group (EFAG) Mr. Zak Covar, Executive Director Texas Commission on Environmental Quality (TCEQ) Dear Chairman Fraser, Chairman Ritter and Mr. Covar: Please accept this submittal of the Work Plan for Adaptive Management (Work Plan) from the Guadalupe, San Antonio, Mission, and Aransas Rivers and Mission, Copano, Aransas and San Antonio Bays Basin and Bay Area Stakeholders Committee (BBASC). The BBASC has offered a comprehensive list of study efforts and activities that will provide additional information for future environmental flow rulemaking as well as expand knowledge on the ecosystems of the rivers and bays within our basin. The BBASC Work Plan is prioritized in three tiers, with the Tier 1 recommendations listed in specific priority order. Study efforts and activities listed in Tier 2 are presented as a higher priority than those items listed in Tier 3; however, within the two tiers the efforts are not prioritized. The BBASC preferred to present prioritization in this manner to highlight the studies and activities it identified as most important in the immediate term without discouraging potential sponsoring or funding entities interested in advancing efforts within the other tiers. -
Stream Monitoring and Educational Program in the Red River Basin
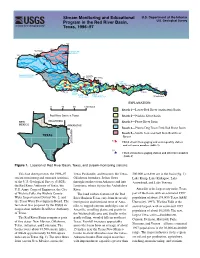
Stream Monitoring and Educational U.S. Department of the Interior Program in the Red River Basin, U.S. Geological Survey Texas, 1996–97 100 o 101 o 5 AMARILLO NORTH FORK 102 o RED RIVER 103 o A S LT 35o F ORK RED R IV ER 1 4 2 PRAIRIE DOG TOWN PEASE 3 99 o WICHITA FORK RED RIVER 7 FALLS CHARLIE 6 RIVE R o o 34 W 8 98 9 I R o LAKE CHIT 21 ED 97 A . TEXOMA o VE o 10 11 R 25 96 RI R 95 16 19 18 20 DENISON 17 28 14 15 23 24 27 29 22 26 30 12,13 LAKE PARIS KEMP LAKE LAKE KICKAPOO ARROWHEAD TEXARKANA EXPLANATION 0 40 80 120 MILES Reach 1—Lower Red River (mainstem) Basin Red River Basin in Texas Reach 2—Wichita River Basin NEW OKLAHOMA Reach 3—Pease River Basin MEXICO ARKANSAS Reach 4—Prairie Dog Town Fork Red River Basin Reach 5—North Fork and Salt Fork Red River TEXAS Basins 12 LOUISIANA USGS streamflow-gaging and water-quality station and reference number (table 1) 22 USGS streamflow-gaging station and reference number (table 1) Figure 1. Location of Red River Basin, Texas, and stream-monitoring stations. This fact sheet presents the 1996–97 Texas Panhandle, and becomes the Texas- 200,000 acre-feet are in the basin (fig. 1): stream monitoring and outreach activities Oklahoma boundary. It then flows Lake Kemp, Lake Kickapoo, Lake of the U.S. Geological Survey (USGS), through southwestern Arkansas and into Arrowhead, and Lake Texoma. -
Stormwater Management Program 2013-2018 Appendix A
Appendix A 2012 Texas Integrated Report - Texas 303(d) List (Category 5) 2012 Texas Integrated Report - Texas 303(d) List (Category 5) As required under Sections 303(d) and 304(a) of the federal Clean Water Act, this list identifies the water bodies in or bordering Texas for which effluent limitations are not stringent enough to implement water quality standards, and for which the associated pollutants are suitable for measurement by maximum daily load. In addition, the TCEQ also develops a schedule identifying Total Maximum Daily Loads (TMDLs) that will be initiated in the next two years for priority impaired waters. Issuance of permits to discharge into 303(d)-listed water bodies is described in the TCEQ regulatory guidance document Procedures to Implement the Texas Surface Water Quality Standards (January 2003, RG-194). Impairments are limited to the geographic area described by the Assessment Unit and identified with a six or seven-digit AU_ID. A TMDL for each impaired parameter will be developed to allocate pollutant loads from contributing sources that affect the parameter of concern in each Assessment Unit. The TMDL will be identified and counted using a six or seven-digit AU_ID. Water Quality permits that are issued before a TMDL is approved will not increase pollutant loading that would contribute to the impairment identified for the Assessment Unit. Explanation of Column Headings SegID and Name: The unique identifier (SegID), segment name, and location of the water body. The SegID may be one of two types of numbers. The first type is a classified segment number (4 digits, e.g., 0218), as defined in Appendix A of the Texas Surface Water Quality Standards (TSWQS). -

Beetle - Mania Is a Ne Wsletter on Biological Control of Saltcedar in Texas, and Is Written and Produced by Allen Knutson , Texas A&M Agrilife Extension
BEETLE - MANIA IS A NE WSLETTER ON BIOLOGICAL CONTROL OF SALTCEDAR IN TEXAS, AND IS WRITTEN AND PRODUCED BY ALLEN KNUTSON , TEXAS A&M AGRILIFE EXTENSION. TO BE INCLUDED ON THE MAILING LIST, PLEASE CONTACT ALLEN KNUTSON. BEETLE - MANIA BIOLOGICAL CONTROL OF SALTCEDAR IN TEXAS VOL. 4 NO. 2 SUMMER - F A L L 2 0 1 2 2012. 2012. A A Very Very Good Good Year Year for for : TamariskSaltcedar Leaf Leaf Beetles Beetles in in Texas Texas ! ! The saltcedar leaf beetle feeds only on During 2012, saltcedar leaf seem to favor increase of river miles. However, follow- beetle populations increased saltcedar leaf beetles. If the ing the prolonged freeze, of saltcedar and athel. and dispersed at many loca- winter of 2012-2013 is again February 2011, none were Athel is a closely tions across the state and mild, leaf beetles should re- found and this species is now related species that more saltcedar trees were turn in force next year. believed to be absent from this grows along the Rio defoliated than ever before. There are now three spe- region. A second species, the After the early February cies of leaf beetle established subtropical leaf beetle Grande River in 2011 freeze, beetle popula- in Texas; the Uzbek beetle in (Tunisian) was released at five Texas. tions were low or absent at the Panhandle, the Mediterra- sites on the Pecos River in many sites last summer. nean (Crete) leaf beetle on 2010-2011 and quickly estab- However, the mild winter of the Upper Colorado River, lished and increased. During If saltcedar or 2011-2012 favored survival of and the subtropical leaf beetle 2012, this species, originally athel trees are not overwintering beetles. -

MEXICO Las Moras Seco Creek K Er LAVACA MEDINA US HWY 77 Springs Uvalde LEGEND Medina River
Cedar Creek Reservoir NAVARRO HENDERSON HILL BOSQUE BROWN ERATH 281 RUNNELS COLEMAN Y ANDERSON S HW COMANCHE U MIDLAND GLASSCOCK STERLING COKE Colorado River 3 7 7 HAMILTON LIMESTONE 2 Y 16 Y W FREESTONE US HW W THE HIDDEN HEART OF TEXAS H H S S U Y 87 U Waco Lake Waco McLENNAN San Angelo San Angelo Lake Concho River MILLS O.H. Ivie Reservoir UPTON Colorado River Horseshoe Park at San Felipe Springs. Popular swimming hole providing relief from hot Texas summers. REAGAN CONCHO U S HW Photo courtesy of Gregg Eckhardt. Y 183 Twin Buttes McCULLOCH CORYELL L IRION Reservoir 190 am US HWY LAMPASAS US HWY 87 pasas R FALLS US HWY 377 Belton U S HW TOM GREEN Lake B Y 67 Brady iver razos R iver LEON Temple ROBERTSON Lampasas Stillhouse BELL SAN SABA Hollow Lake Salado MILAM MADISON San Saba River Nava BURNET US HWY 183 US HWY 190 Salado sota River Lake TX HWY 71 TX HWY 29 MASON Buchanan N. San G Springs abriel Couple enjoying the historic mill at Barton Springs in 1902. R Mason Burnet iver Photo courtesy of Center for American History, University of Texas. SCHLEICHER MENARD Y 29 TX HW WILLIAMSON BRAZOS US HWY 83 377 Llano S. S an PECOS Gabriel R US HWY iver Georgetown US HWY 163 Llano River Longhorn Cavern Y 79 Sonora LLANO Inner Space Caverns US HW Eckert James River Bat Cave US HWY 95 Lake Lyndon Lake Caverns B. Johnson Junction Travis CROCKETT of Sonora BURLESON 281 GILLESPIE BLANCO Y KIMBLE W TRAVIS SUTTON H GRIMES TERRELL S U US HWY 290 US HWY 16 US HWY P Austin edernales R Fredericksburg Barton Springs 21 LEE Somerville Lake AUSTIN Pecos -
![Matching the Hatch for the TX Hill Country[2]](https://docslib.b-cdn.net/cover/3744/matching-the-hatch-for-the-tx-hill-country-2-693744.webp)
Matching the Hatch for the TX Hill Country[2]
MATCHING THE HATCH FOR THE TX HILL COUNTRY Tying and choosing proper fly patterns to increase your success on the water. Matt Bennett Fly Geek Custom Flies [email protected] Why should you listen to me? • Fishing the Austin area since 2008 • LWFF – 2012 through 2015 • Fly Geek Custom Flies – 2015 – now • Past Austin Fly Fishers President • Current TX Council Vice President Overview of the TX Hill Country Llano River near Kingsland Guadalupe River at Lazy L&L Brushy Creek near Round Rock Characteristics of Hill Country Rivers ¨ There’s a bunch! Guadalupe, Comal, San Marcos, Colorado, Llano, Blanco, Nueces, Frio, Sabinal, Concho, Lampasas and associated feeder creeks ¨ Majority are shallow and wadeable in stretches ¨ Extremely Clear Water (some clearer than others) ¨ Sandy, limestone and granite bottoms with lots of granite boulders/outcroppings ¨ Extreme flooding events YEARLY on average. Sept 11, 1952 – Lake Travis rises 57 feet in 14 hours. 23-26” of rain Guadalupe River, July 17,1987 Llano River / Lake LBJ – Nov. 4 2000 Why does flooding matter to fishing? ¨ Because of the almost-annual flooding / drought cycle of our rivers, they are constantly changing ¨ Holes get filled in and dug out, gravel gets moved around, banks get undercut ¨ We have to constantly relearn our fisheries to stay successful on the water ¨ Choosing the right flies with the proper triggers is an important part of your success on the water Overview of our forage Baitfish, crawfish, insects, and other terrestrials Why is forage important? ¨ #1 rule of all fishing – know your forage! ¨ Knowing the common forage where you fish increases your chances of success as it clues you in on what flies you should be fishing ¨ Forage base will vary between water bodies, time of year, species targeted, and more, as well as year-to-year. -

10 Most Significant Weather Events of the 1900S for Austin, Del Rio and San Antonio and Vicinity
10 MOST SIGNIFICANT WEATHER EVENTS OF THE 1900S FOR AUSTIN, DEL RIO AND SAN ANTONIO AND VICINITY PUBLIC INFORMATION STATEMENT NATIONAL WEATHER SERVICE AUSTIN/SAN ANTONIO TX 239 PM CST TUE DEC 28 1999 ...10 MOST SIGNIFICANT WEATHER EVENTS OF THE 1900S FOR AUSTIN...DEL RIO AND SAN ANTONIO AND VICINITY... SINCE ONE OF THE MAIN FOCUSES OF WEATHER IN CENTRAL AND SOUTH CENTRAL TEXAS INVOLVES PERIODS OF VERY HEAVY RAIN AND FLASH FLOODING...NOT ALL HEAVY RAIN AND FLASH FLOOD EVENTS ARE LISTED HERE. MANY OTHER WEATHER EVENTS OF SEASONAL SIGNIFICANCE ARE ALSO NOT LISTED HERE. FOR MORE DETAILS ON SIGNIFICANT WEATHER EVENTS ACROSS CENTRAL AND SOUTH CENTRAL TEXAS IN THE PAST 100 YEARS...SEE THE DOCUMENT POSTED ON THE NATIONAL WEATHER SERVICE AUSTIN/SAN ANTONIO WEBSITE AT http://www.srh.noaa.gov/images/ewx/wxevent/100.pdf EVENTS LISTED BELOW ARE SHOWN IN CHRONOLOGICAL ORDER... FIRST STARTING WITH AUSTIN AND VICINITY...FOLLOWED BY DEL RIO AND VICINITY...AND ENDING WITH SAN ANTONIO AND VICINITY. AUSTIN AND VICINITY... 1. SEPTEMBER 8 - 10... 1921 - THE REMNANTS OF A HURRICANE MOVED NORTHWARD FROM BEXAR COUNTY TO WILLIAMSON COUNTY ON THE 9TH AND 10TH. THE CENTER OF THE STORM BECAME STATIONARY OVER THRALL...TEXAS THAT NIGHT DROPPING 38.2 INCHES OF RAIN IN 24 HOURS ENDING AT 7 AM SEPTEMBER 10TH. IN 6 HOURS...23.4 INCHES OF RAIN FELL AND 31.8 INCHES OF RAIN FELL IN 12 HOURS. STORM TOTAL RAIN AT THRALL WAS 39.7 INCHES IN 36 HOURS. THIS STORM CAUSED THE MOST DEADLY FLOODS IN TEXAS WITH A TOTAL OF 215 FATALITIES. -
Beach and Bay Access Guide
Texas Beach & Bay Access Guide Second Edition Texas General Land Office Jerry Patterson, Commissioner The Texas Gulf Coast The Texas Gulf Coast consists of cordgrass marshes, which support a rich array of marine life and provide wintering grounds for birds, and scattered coastal tallgrass and mid-grass prairies. The annual rainfall for the Texas Coast ranges from 25 to 55 inches and supports morning glories, sea ox-eyes, and beach evening primroses. Click on a region of the Texas coast The Texas General Land Office makes no representations or warranties regarding the accuracy or completeness of the information depicted on these maps, or the data from which it was produced. These maps are NOT suitable for navigational purposes and do not purport to depict or establish boundaries between private and public land. Contents I. Introduction 1 II. How to Use This Guide 3 III. Beach and Bay Public Access Sites A. Southeast Texas 7 (Jefferson and Orange Counties) 1. Map 2. Area information 3. Activities/Facilities B. Houston-Galveston (Brazoria, Chambers, Galveston, Harris, and Matagorda Counties) 21 1. Map 2. Area Information 3. Activities/Facilities C. Golden Crescent (Calhoun, Jackson and Victoria Counties) 1. Map 79 2. Area Information 3. Activities/Facilities D. Coastal Bend (Aransas, Kenedy, Kleberg, Nueces, Refugio and San Patricio Counties) 1. Map 96 2. Area Information 3. Activities/Facilities E. Lower Rio Grande Valley (Cameron and Willacy Counties) 1. Map 2. Area Information 128 3. Activities/Facilities IV. National Wildlife Refuges V. Wildlife Management Areas VI. Chambers of Commerce and Visitor Centers 139 143 147 Introduction It’s no wonder that coastal communities are the most densely populated and fastest growing areas in the country.