Dynamic
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Yokohama Reinventing the Future of a City Competitive Cities Knowledge Base Tokyo Development Learning Center
COMPETITIVE CITIES FOR JOBS AND GROWTH CASE STUDY Public Disclosure Authorized YOKOHAMA REINVENTING THE FUTURE OF A CITY COMPETITIVE CITIES KNOWLEDGE BASE TOKYO DEVELOPMENT LEARNING CENTER October 2017 Public Disclosure Authorized Public Disclosure Authorized Public Disclosure Authorized © 2017 The World Bank Group 1818 H Street NW Washington, DC 20433 Telephone: 202-473-1000 Internet: www.worldbank.org All rights reserved. This volume is a product of the staff of the World Bank Group. The World Bank Group refers to the member institutions of the World Bank Group: The World Bank (International Bank for Reconstruction and Development); International Finance Corporation (IFC); and Multilater- al Investment Guarantee Agency (MIGA), which are separate and distinct legal entities each organized under its respective Articles of Agreement. We encourage use for educational and non-commercial purposes. The findings, interpretations, and conclusions expressed in this volume do not necessarily reflect the views of the Directors or Executive Directors of the respective institutions of the World Bank Group or the governments they represent. The World Bank Group does not guaran- tee the accuracy of the data included in this work. Rights and Permissions This work is a product of the staff of the World bank with external contributions. The findings, interpretations, and conclusions expressed in this work do not necessarily reflect the views of the World Bank, its Board of Executive Directors, or the governments they represent. Nothing herein shall constitute or be considered to be a limitation upon or waive of the privileges and immunities of the World Bank, all of which are specifically reserved. Contact: World Bank Group Social, Urban, Rural and Resilience Global Practice Tokyo Development Learning Center (TDLC) Program Fukoku Seimei Bldg. -

Print (1.08MB)
December 3, 2018 For immediate release Mitsui Fudosan Co., Ltd. Mitsui Fudosan’s Outlet Park Reconstruction Business MITSUI OUTLET PARK YOKOHAMA BAYSIDE Reconstruction Plan (tentative name) Started Construction on December 3 Opening Planned for Spring 2020 Tokyo, Japan, December 3, 2018 - Mitsui Fudosan Co., Ltd., a leading global real estate company headquartered in Tokyo, announced today that it has started new construction work on the MITSUI OUTLET PARK YOKOHAMA BAYSIDE Reconstruction Plan (tentative name), located at 5-2 Shiraho, Kanazawa-ku, Yokohama, Kanagawa. The facility is planned to reopen in spring 2020. This plan is located on a site with outstanding access by car or public transport, being approx. 1.5 km from Sugita IC on the Metropolitan Expressway Bayshore Route, approx. 1.5 km from the Namiki IC on Yokohama-Yokosuka Road and 5 minutes on foot from Torihama Station on the Yokohama Seaside Line. Since commencing operation in September 1998, MITSUI OUTLET PARK YOKOHAMA BAYSIDE ("Yokohama Bayside Marina Shops & Restaurants" at the time of opening), has been cherished by many visitors. The facility is temporarily closed for renovations to create facilities and functions that meet the needs of customers and the times. Exterior Image (southeast side) 1 / 5 Main Features of the Facility 1. Retail Functions Under this plan, the previous approx. 80 stores is planned to be expanded to approx. 150 stores. MITSUI OUTLET PARK YOKOHAMA BAYSIDE will strive to be a facility where a broad range of visitors of all ages—from youths and families to seniors—can enjoy a richer lineup of brands such as fashion brands from inside and outside of Japan, select refined shops, children’s goods, sports & outdoor goods, and daily use miscellany. -

Tozaisen Ichikawa Myoden-Ekimae
TOZAISEN ICHIKAWA MYODEN-EKIMAE SUPER HOTEL TOZAISEN ICHIKAWA MYODEN-EKIMAE URL : http://www.superhotel.co.jp mobile : http://www.sh-mb.com/ Free healthy breakfast August 2014 renewal opening! Within Tokyo, perfect for access to Disney Resort, Makuhari Messe, and other local attractions. Recommended for both business and tourism! Guest Rooms Single room (up to 2 guests) 12m2 Super room (up to 3 guests) 12m2 Triple room (up to 4 guests) 18m2 (May not appear exactly as shown) (May not appear exactly as shown) (May not appear exactly as shown) Wide bed (150 cm wide) Wide bed (150 cm wide) + loft bed Wide bed (150 cm wide) + loft bed + sofa bed Healthy Breakfast Free Standard Amenities and Facilities in Every Guest Room [Room Facilities] [Amenities] ● 26-inch widescreen LCD TV ● Movies on demand (VOD, 150 titles) ● Toothbrush ● Bath towel ● Complimentary high-speed Internet (LAN) ● Face towel ● Refrigerator ● Air purifier with humidifier ● Two-in-one shampoo ● Unit bathroom ● Bidet ● Hair dryer ● Body soap (May not appear exactly as shown) ● Electric kettle ● Mobile charger ● Pajamas (available on the 6th floor) Super Hotel salads are safe and healthy. [Loanable Items, Other Items] [Hotel Facilities] Made with only organic ● Choice of 7 types of pillows ● Blankets ● Thermometer ● Coin-operated laundry *Free detergent JAS vegetables. ● Light stand ● Trouser press ● Iron ● Sewing set (Clothes washer: 100 yen per use, ● Can opener ● Wine-bottle opener ● Nail clippers Clothes dryer: 100 yen per 30 minutes) We provide a nutritionally balanced and healthy ● Mobile charger ● Copy service (fees apply) ● Vending machines (soft drinks, alcoholic beverages) breakfast for all guests. -

Construction of Ueno–Tokyo Line
Special Feature Construction of Ueno–Tokyo Line JR East Construction Department Introduction to support through services between the Utsunomiya, Takasaki, Joban, and Tokaido lines (Fig. 1). The Council East Japan Railway Company (JR East) has a wide-ranging for Transport Policy Report No. 18 published in January operations area from Kanto and Koshin’etsu to Tohoku. When 2000, targeted opening of the Ueno–Tokyo Line (A1) by JR East was established in 1987, traffic conditions on most 2015. In November 2007, the Minister of Transport gave sections of conventional (narrow-gauge) lines in the Tokyo permission to change the basic plan to a plan for laying area, including major sections of lines radiating from central new tracks between Tokyo Station and Ueno Station and Tokyo (Tokaido, Chuo, Joban, Sobu lines), the Yamanote then permission was given in March 2008 to change the Line, etc., had morning rush-hour congestion rates in excess railway facilities. Construction started in May 2008 and was of 200%. As a result, enhancing transportation capacity completed in about 6 years. The line opened on 14 March to alleviate congestion was a major issue. Furthermore, 2015, following 5–month training run. with subsequent diversification of values accompanying social changes, users’ railway needs went beyond merely Expected Effects alleviating congestion to shorter travel times and improved comfort while travelling, etc., so problems related to Alleviating congestion on Yamanote and Keihin-Tohoku improving transportation in the Tokyo area also diversified. In lines this context, JR East has taken various initiatives to improve The sections between Ueno Station and Okachimachi the quality of railway services. -

History of City Planning in the City of Yokohama
History of City Planning in the City of Yokohama City Planning Division, Planning Department, Housing & Architecture Bureau, City of Yokohama 1. Overview of the City of Yokohama (1) Location/geographical features Yokohama is located in eastern Kanagawa Prefecture at 139° 27’ 53” to 139° 43’ 31” East longitude and 35° 18’ 45” to 35° 35’ 34” North latitude. It faces Tokyo Bay to the east and the cities of Yamato, Fujisawa, and Machida (Tokyo) to the west. The city of Kawasaki lies to the north, and the cities of Kamakura, Zushi, and Yokosuka are to the south. Yokohama encompasses the largest area of all municipalities in the prefecture and is the prefectural capital. There are also rolling hills running north-south in the city’s center. In the north is the southernmost end of Tama Hills, and in the south is the northernmost end of Miura Hills that extends to the Miura Peninsula. A flat tableland stretches east-west in the hills, while narrow terraces are partially formed along the rivers running through the tableland and hills. Furthermore, valley plains are found in the river areas and coastal lowland on the coastal areas. Reclaimed land has been constructed along the coast so that the shoreline is almost entirely modified into manmade topography. (2) Municipal area/population trends The municipality was formed in 1889 and established the City of Yokohama. Thereafter, the municipal area was expanded, a ward system enforced, and new wards created, resulting in the current 18 wards (administrative divisions) and an area of 435.43km2. Although the population considerably declined after WWII, it increased by nearly 100,000 each year during the period of high economic growth. -
Annual Report & CSR Report 2007
Annual Report & CSR Report 2007 Annual Report & CSR Report 2007 The shape and coloring of DBJ’s logo seeks to convey the sense of creativity, energy and youthful vigor with which the Bank strives to meet continuously changing socio-economic needs. The emerging egg shape illustrates our efforts to shape a continuously unfolding future. Development Bank of Japan http://www.dbj.go.jp/english/ DBJ chose environmentally friendly paper and printing methods for the production of this report. Pages 1–68 and 143–146 are made of paper certified by the Forest Stewardship Council (FSC) as being made from sustainably managed forests. Cover pages, page 1–2 and 71–170 are made of recycled paper. All pages are printed with soy ink certified by the American Soybean Association. Printed in Japan Contents 01 ■ Profile 02 ■ Financial Highlights 03 ■ Message from the Governor 04 ■ Privatizing DBJ 08 ■ The DBJ Difference 10 ■ DBJ’s Role 12 ■ CSR at DBJ 14 ■ DBJ’s Management Functions 15 Management System 15 Corporate Governance 17 Internal Audits 18 Compliance 19 Risk Management 23 Disclosure 24 ■ Overview of Investment and Loan Activities 25 DBJ’s Investments and Loans 28 Fiscal 2008 Investment and Loan Plans 29 ■ Providing Financial Services to Resolve the Issues Society Faces 30 Revitalization Assistance for Regional Economies 36 Environment Conservation and Building Social Infrastructure 42 Technology: A Creative Force that Drives Economic Growth 46 Promoting Foreign Direct Investment in Japan and Supporting the Internationalization of Local Communities -

Delivering Prime Logistics Investment to the Japanese REIT Market
3rd Fiscal Period Semi-Annual Report March 1, 2017 to August 31, 2017 LaSalle LOGIPORT REIT 2-1-1 Otemachi, Chiyoda-ku, Tokyo, Japan Delivering Prime Logistics Investment to the Japanese REIT Market Table of Contents Executive Director’s Message 2 About LaSalle Inc. 26 Property and Corporate Level Income Statement, LaSalle Group’s Professional Support DPU Summary, and Yield Summary 4 Contributes to Greater Unitholder Value 28 Future Growth Strategies Operation and Governance Emphasizing Unitholders’ Interests and Transparency 30 External Growth Strategy 6 Decision Making Flowchart for Related Internal Growth Strategy 8 Party Transactions 31 Financial Strategy 10 Risk Factors 32 The LaSalle Group’s Commitment to Financial Section Sustainability 12 Balance Sheets 36 Recognizing the Importance of Sustainability 14 Statements of Income 37 Findings So Far 16 Statements of Changes in Net Assets 38 Portfolio Statements of Cash Flows 39 Portfolio Summary 18 Notes to Financial Statements 40 Details of Portfolio 20 Independent Auditor’s Report 52 Investor Information 53 Financial Highlights for 3rd Fiscal Period (March 1, 2017 - August 31, 2017) Total Assets Under Management Portfolio Size Occupancy Rate (“AUM”) 9 properties 173.4 bn yen 98.6% Tokyo Area Concentration Total Debt Loan to Value (“LTV”) Ratio 100.0% 71.03 bn yen 38.6% Operating Revenues Operating Income Net Income 5,234 mn yen 2,739 mn yen 2,429 mn yen Distribution Per Unit (“DPU”) Earnings Per Unit (“EPU”) DPU in Excess of Earnings 2,379 yen 2,209 yen 170 yen Note: All of the figures above are as of August 31, 2017, the end of the 3rd fiscal period. -

Corporate Brochure
Each of the Port of Yokohama’s three piers, Daikoku Pier, Honmoku Pier and Minami Honmoku Pier, is linked to a state-of-the-art container pier. Thanks to convenient access to Japan’s expressway network, via National Outstanding Highway No. 357 and the Bayshore Route of the Shuto Expressway, tenants enjoy easy access to the Tokyo area and every region of Japan. The location is ideal. Transportation is getting more convenient all the time, Location with direct connections to new expressways such as Route No. 3 of the Keihin Expressway, which links to the Tomei Expressway. Y-CC is widely expected to play an ever-growing role as an import/export logistics hub. Yokohama Ring Expwy. North Route Namamugi JCT 15 Namamugi 1 Koyasu No. 5 Daikoku Route, Ogishima Shuto Expwy. Higashi-kanagawa No. 1 Yokoha Route, Daikoku Bridge Shuto Expwy. Mitsuzawa Mizuho Pier Bayshore Route, Yokohama Station West Exit Shuto Expwy. Yokohama Kinko JCT Tsurumi Tsubasa Bridge Station Keihin Port Yokohama Station East Exit Daikoku JCT Entrance/exit to Port of Yokohama Minato Mirai Station Daikoku Pier Minato Mirai 1 Shinko Pier Daikoku Pier Sakuragicho Station 133 Yamashita Pier National Highway 357 Yokohama Park Yokohama Bay Bridge Shin-yamashita 357 Ishikawa-cho JCT Ishikawa-cho Honmoku Bandobashi Honmoku JCT Pier Hananoki Honmoku Pier No. 3 Kariba Route, Shuto Expwy. Shuto Shuto Expwy. 357 Route, Bayshore Tokyo Bay 16 Yokohama Sankeien Garden Minami-honmoku Pier Corporate Brochure Official name Yokohama Port International Cargo Center Co., Ltd. (株式会社横浜港国際流通センター) Address 22 Daikoku-futo, Tsurumi-ku, Yokohama-shi, Kanagawa 230-0054 Date established December 18, 1992 Start of operations August 1, 1996 Capital ¥7,685 million Major shareholders City of Yokohama, Kanagawa Prefecture, Development Bank of Japan, Yokohama Port Corporation, Tenancy and leasing inquiries, etc. -
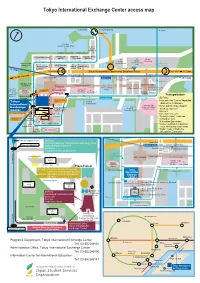
Tokyo International Exchange Center Access Map
Tokyo International Exchange Center access map To Shimbashi To Rainbow Bridge To Toyosu ↑ Daiba Exit Sea Bus (Odaiba Seaside Park) SEAREA ODAIBA SANBANGAI ●Odaiba Marine Park ●Marine House ● ● ● ● ●Hotel Nikko Tokyo Aqua City DECKS SEAREA ODAIBA Odaiba Tokyo Beach GOBANGAI ● ● Ariake Daiba Sta. Ariake Odaiba-kaihinkoen Sta. Ariake Colosseum Tennis-no-mori Shiokaze Park Ariake JCT Sports Center Ariake tennis ● ● ● Park (North Area) ●Fuji Television no mori Sta. GRAND PACIFIC TradePia Daiba Frontier ● 357 To LE DAIBA Odaiba Bldg. Tokyo Wangan doro Osaki Rinkaifukutoshin Exit Shuto Metropolitan Expressway Bayshore Route Ariake Exit To Chiba Tokyo Teleport Sta. Kokusai-tenjijo Sta. da ・i Hane To O West Promenade Rinkai Line ●Tokyo Water To Shin-kiba Science Museum Ariake Sta. ● Shiokaze Park East Promenade (South Area) FUNE-NO Center Promenade KAGAKUKAN Tokyo Yumenoohashi ●Tokyo Bay Ariake STA. ●Tokyo Fashion Town Sea Bus Funenokagakukan Palette Town Bridge Washington Hotel (Museum Museum (Venus Fort, ● -eki-mae Academic ● of of Maritime Sun Walk) Ferris Wheel Ariake Frontier Maritime Science Park Building Transportation ) ● Science Higashi Yashio Aomi 1 chome Aomi Sta. Greenway YURIKAMOME Kokusai tenjijo <By Train> Shinboru-puromunado seimon Sta. ・3 min. walk from "Fune-no Kagakukan" Tokyo -koen-mae Sea Bus International (Palette Town) (East exit) on Yurikamome Tokyo Big Sight ・15 min. walk from "Tokyo Teleport" National Museum of (Tokyo Inter national Exchange ● Sea Bus Emerging Science Exhibition Center) (B exit) on Rinkai Line (Tokyo Big Sight) Center and Innovation <By Car> Nihon-kagaku-miraikan-mae ● ● AIST Tokyo 5 min. from these exits: Tokyo Waterfront ・"Rinkaifukutoshin", eastbound Tokyo-kowan-godo Wangan on Bayshore route, -chosha-mae Police Station ● ● ● Time 24 Metropolitan Expressway Aomi Frontier Building Tokyo ・"Ariake", westbound on Bayshore Kowan Godo Chosha ● Telecom center Sta. -

Access Map to Panasonic Corporation Panasonic Laboratory Tokyo
Access Map to <Street Address> Panasonic Corporation 〒135-8072 5th Floor, TFT Building West Wing, 3-4-10 Ariake, Koto Ward, Tokyo Panasonic Laboratory Tokyo Ariake-Tennis-no -Mori Station Route 10 Route 11 (Daiba Route), Shuto Expressway (Harumi Route), Shuto Expressway Shinonome Station Ariake IC Rinkai Line Ariake Colosseum Bayshore Route, Yurikamome Daiba IC Shuto Expressway Panasonic Center Tokyo Kokusai-Tenjijo Station Hotel Sun Route Ariake Ariake Station TOC Ariake Ariake Frontier Building Ariake Center Tokyo Bay Ariake Washington Hotel Building Ariake Park Building Tokyo Big Sight-mae Ariake Central Tower N Odaiba-Kaihinkoen Station Tokyo Big Sight Tokyo Water Tokyo Big Sight-seimon Science Museum Kokusai-Tenjijo-Seimon Station Rinkai-Fukutoshin IC TFT Building East Wing (Tokyo Fashion Town Building) 5th Floor, TFT Building West Wing Daiba Station Tokyo Teleport Station (Tokyo Fashion Town Building) Divercity <Transportation> ←Osaki Tokyo Ōme Station 1. Access by train •Direct connection from Kokusai-Tenjijo-Seimon Station, 8 minutes from Toyosu Station, 22 minutes from Shimbashi Station on the Station Venus Yurikamome Line. Fort •5 minute walk after getting off at Kokusai-Tenjijo Station, 5 minutes from Shin-Kiba Station, 8 minutes from Osaki Station on the Rinkai Line. (4 minutes to Shimbashi Station, 14 minutes to Osaki Station by JR from Tokyo Station; 4 to 7 minutes to Shimbashi Station, 2 minutes to Osaki Station by JR from Shinagawa Station.) 2. Access by bus Yurikamome •By Limousine Bus, a 2 minute walk after getting off at Tokyo Big Sight, 30 minutes from Haneda Airport. •By Toei Bus (Higashi 16), a 4 minute walk after getting off at Ferry-Futo-Iriguchi, 36 minutes from the Yaesu Exit of Tokyo Station. -

Environmental Activities of the Metropolitan Expressway
CONTENTS 1. Toward a Low-carbon Society ....................................................... p.1-3 2. Toward a Society in Harmonious Co-existence with Nature ........ p.4-7 3. Improving the Roadside Environment ........................................... p.8-9 4. Toward a Recycling Society ......................................................... p.10 5. Environmental Management ......................................................... p.11-12 Connecting with Intercity Expressways and Enhancing Roadside Environments (Mid-1970s to late 1980s) Traffic volumes surged as the Metropolitan Serious Measures Expressway joined up with intercity Against Pollution expressways such as the Chuo Expressway, (Mid-1960s to mid-1970s) Tohoku Expressway and Joban Expressway. In tandem, problems began emerging in the The Metropolitan Expressway Began As road-traffic congestion continued to roadside environment (the environment with the Tokyo Olympics intensify, work proceeded on construction near expressways). of the Metropolitan Expressway. Noise barriers, environmental-facility belts (Mid-1950s to mid-1960s) The Kanagawa section opened to traffic in and other roadside environmental measures 1968. By 1973 the length of the Metropolitan began to be put into place. The rapid motorization of Japan from the Expressway exceeded 100 km. Meanwhile, late 1950s onward brought enormous awareness of pollution issues was rising congestion to the streets of central Tokyo. among the Japanese people, as evidenced This concern, together with the selection by the passage of the Environmental of Tokyo as the venue for the 1964 Olympics, Pollution Prevention Act and discussion of spurred the construction of the Metropolitan pollution in the Diet. Expressway at a breakneck pace. In December 1962, the first expressway, covering 45 km between Kyobashi and Shibaura, opened to traffic. This was followed by another 33 km section by the start of the 1964 Tokyo Olympics, enabling large numbers of spectators and athletes to use it to travel from Haneda Airport to the National Stadium and Olympic Village. -

Aomi Exhibition Halls Floor Guide AOMI
Tokyo Big Sight Aomi Exhibition Halls Floor guide AOMI to Shibaura-futo Sta. (U-05) to Daiba Sta. 6 (U-07) minutes Yurikamome Line Odaiba-Kaihinkoen Sta. (U-06) Route 357 Teleport Bridge Shuto Express Way Bayshore Route Rinkai Line Route 357 Tokyo Teleport Sta. to Kokusai- tenjijo Sta. (R-04) (R-03) Exit B to Tennozu Isle Sta.(R-05) Exit A Tokyo 2 Entrance minutes Hall A Hall B Wangan Under Entrance Center Promenade 4 minutes Legend Station Bus Yurikamome Rinkai Line Line Venusfort Mega Web Tourist Information Information Yurikamome Line Aomi Sta.(U-10) Business Center Restroom Accessible Ostomate Facility to Telecom Center Sta. to Tokyo Big Sight Sta. (R-09) (U-11) Baby Chair Nursing Room Tokyo Big Site AOMI Exhibition Hall Facility Outline ●Structural Scale Steel Frame 1F Tokyo Big Sight Inc. Site Area / 37,306 ㎡ Building Area / 24,983 ㎡ 3-11-1 Ariake, Koto-ku, Tokyo 135-0063 Total floor Area / 25,032 ㎡ tel.+81‒ 3 - 5530‒ 1111 Display Area / 23,256 ㎡ http://www.bigsight.jp/english More on the web http://www.bigsight.jp/english Access Tokyo Big Sight⇔Aomi Exhibition Halls ■Free Shuttle Bus ■Tr a i n・B u s When events are being held at Tokyo Big Sight (West / South Halls) or Conference Tower and the Aomi Exhibition Halls at the same time, a free shuttle Yurikamome Line bus running between Tokyo Big Sight and the Aomi Exhibition Halls is available (normally between 10 AM and 6 PM, approximately 8-minute intervals). Approx. Approx. ※Delays in the running interval / ride length may occur depending on the traffic 4 minutes Approx.