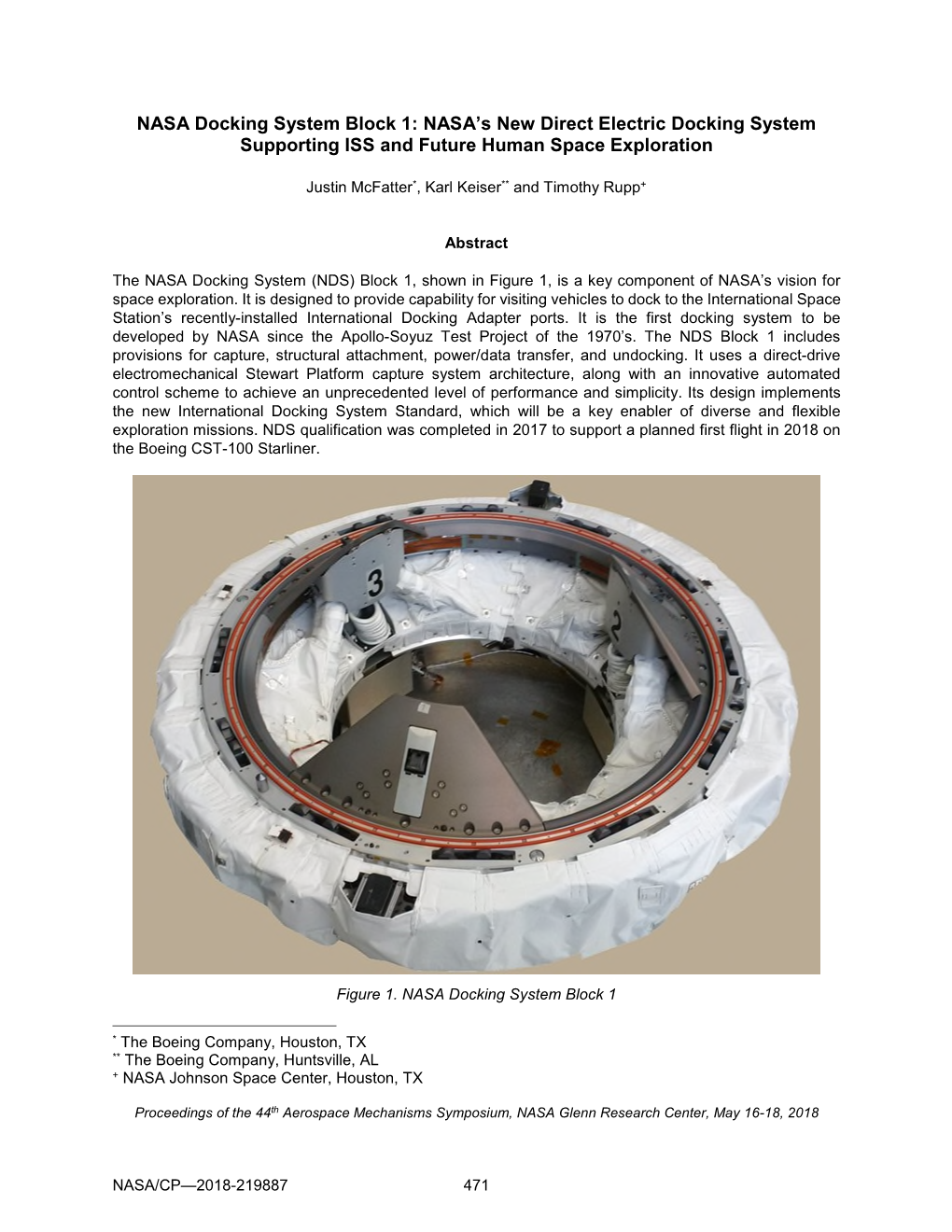
NASA's New Direct Electric Docking System Supporting ISS and Future
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Paper Session III-A-History of the First NASA Contract with Russia
1994 (31st) Space Exploration and Utilization The Space Congress® Proceedings for the Good of the World Apr 28th, 2:00 PM - 5:00 PM Paper Session III-A - History of the First NASA Contract with Russia Barbara D. Connelly-Fratzke NASA Headquarters, Office of Space Systems Development Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Connelly-Fratzke, Barbara D., "Paper Session III-A - History of the First NASA Contract with Russia" (1994). The Space Congress® Proceedings. 18. https://commons.erau.edu/space-congress-proceedings/proceedings-1994-31st/april-28-1994/18 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. History of the First NASA Contract with Russia Barbara D. Connelly-Fratzke NASA Headquarters Office of Space Systems Development This story begins after the end of the cold war with the Soviet Union. after perestroika had its initial impact on the economy, at about the time the Russian space firms were beginning to lose government support and fac ing hard times ahead. As part or the FY92 Budget approval, Congress, in its wisdom, directed NASA to investigate the Russian space hardware and determine its feasibility for use in the U.S. space program. At the invitation of the U.S. Embassy in Moscow and the Russian firm NPO Energia, NASA made a reconnaissance visit to NPO Energia to open discussions concerning Russian space hardware. -
Proposals on Spw Evolution
ROSCOSMOS Igor V. Orlovsky Deputy Head of Onboard Control Systems Division Alexey A. Khakhulin Team Manager, Next‐Generation Onboard Control Systems Developm th 16 SpaceWire Working Group, 21‐23 March 2011 ESA/ESTEC, Noorwijk, The Netherla Rocket and Space Corporation Energia named after Sergei Korolev Rocket and Space Corporation Energia after S.P. Korolev Rocket is the strategic enterprise of Russia and the leading company engaged in manned space systems. A great deal of attention is focused on the development of new space technologies, including dedicated unmanned space systems for various applications, rocket systems for spacecraft orbital injection. Its presence is noticeable on the international market of rocket and space services. It is the leader in introducing space high technologies for manufacture of products not related to space industry. Its structure: •Primary Design Bureau; •Baikonur branch; •ZAO Experimental Machinebuilding Plant, RSC Energia; •ZAO Volzhskoye DB; •ZAO PO Kosmos, RSC Energia; •Developed social infrastructure. •38% of the Corporation equity is owned by the state. CORE ACTIVITIES • Manned Space Systems • Unmanned Space Systems • Rocket Systems • Advanced Programs • Provision of Services CRUCIALLY IMPORTANT REQUIREMENTS FOR ONBOARD INTERFACES . providing equipment scalability . easy upgrading . supporting real-time transmission of large amounts of data and time-critical commands and data within a broad range of data rates and transmission distances . etc Up to now it has been very difficult to develop an all‐purpose interface. SPACEWIRE AS A BASE FOR NEXT‐GENERATION ONBOARD CONTROL SYSTEM Parameters of SpaceWire interface are closest to meeting the requirements of the all-purpose interface but along with significant advantages, has certain drawbacks. -

Of S.P. Korolev Rocket and Space Public Corporation Energia for 2013
OF S.P. KOROLEV ROCKET AND SPACE PUBLIC CORPORATION ENERGIA FOR 2013 This Annual Report of S.P. Korolev Rocket and Space Public Corporation Energia (also hereinafter called “OAO RSC Energia”, “RSC Energia”, “the Corporation”) by the 2013 performance is drawn up in accordance with the RF Government Decree No 1214 as of December 31, 2010 “On Improvement of the Procedure for Management of Open Joint-Stock Companies Whose Stock is in Federal Ownership and Federal State Unitary Enterprises” with due regard for the requirements set forth in the Order issued by the RF Federal Financial Markets Service No 11-46/pz-n as of October 4, 2011 “On Approval of the Provision on Information Disclosure of Issuers of Registered Securities”. This Annual Report was preliminarily approved by RSC Energia’s Board of Directors on April 29, 2014. Minutes No10 as of May 6, 2014. Accuracy of the data contained in this Annual Report was confirmed by RSC Energia’s Auditing Committee Report as of April 17, 2014. 2 TABLE OF CONTENTS KEY PERFORMANCE INDICATORS ........................................................................... 6 ON CORPORATION ACTIVITIES ................................................................................. 8 Corporation background ................................................................................................................................8 Corporation structure (its participation in subsidiary and affiliated companies) ...........................................9 Information about purchase and sale contracts for -

Space Station” IMAX Film
“Space Station” IMAX Film Theme: Learning to Work, and Live, in Space The educational value of NASM Theater programming is that the stunning visual images displayed engage the interest and desire to learn in students of all ages. The programs do not substitute for an in-depth learning experience, but they do facilitate learning and provide a framework for additional study elaborations, both as part of the Museum visit and afterward. See the “Alignment with Standards” table for details regarding how “Space Station!” and its associated classroom extensions, meet specific national standards of learning. What you will see in the “Space Station” program: • How astronauts train • What it is like to live and work in Space aboard the International Space Station (ISS) Things to look for when watching “Space Station”: • Notice how quickly astronauts adapt to free fall conditions and life on the ISS • Reasons humans go to the cost, risk, and effort to work in Space • The importance of “the little things” in keeping astronauts productive so far from home Learning Elaboration While Visiting the National Air and Space Museum Perhaps the first stop to expand on your “Space Station” experience should be the Skylab Orbiting Laboratory, entered from the second floor overlooking the Space Race Gallery. Skylab was America’s first space station, launched in 1973 and visited by three different three-man crews. It fell back to Earth in 1979. The Skylab on display was the back-up for the Skylab that was launched; the Skylab program was cancelled before it was -

Put to the Test on Board the International Space Station ISS
GENERAL PURPOSE Reference Handheld Spectrum Analyzer R&S ® FSH3 Put to the test on board the International Space Station ISS The R&S ® FSH3 (FIG 1) from Time signal system in the test means of a Progress space transporter phase and installed by the crew (FIG 3). Rohde & Schwarz is a high-end The global transmission services (GTS) spectrum analyzer in handheld design system is a new system for the world- Needed – a featherweight wide transmission of time signals high-tech analyzer that features low weight, minimum to receivers on the ground, such as watches or clocks in vehicles. It is cur- However, when the electronics unit was power consumption and outstanding rently being tested as part of a pilot initially put into operation in February experiment on board the ISS (FIG 2). 2002, it exhibited deviations from the RF performance [*]. It is currently This is the first commercial experiment precalculated receive field strength on aboard the space station. Once the test the ground. Nevertheless, the teleme- being used on board the International phase has been completed, the GTS try performed both on board the ISS and system is to be transferred to an opera- via the ground station exhibited nomi- Space Station (ISS) for distance-to- tor company. Owing to a recently devel- nal values. One of the possible reasons oped cryptographic modulation, further for this deviation may have been two RF fault (DTF) measurements. services such as vehicle theft protec- wiring harnesses that had already been tion or the tracking of specific items (e.g. installed prior to the launch and that containers or stolen goods) can also be had been in space for two years. -

Part 2 Almaz, Salyut, And
Part 2 Almaz/Salyut/Mir largely concerned with assembly in 12, 1964, Chelomei called upon his Part 2 Earth orbit of a vehicle for circumlu- staff to develop a military station for Almaz, Salyut, nar flight, but also described a small two to three cosmonauts, with a station made up of independently design life of 1 to 2 years. They and Mir launched modules. Three cosmo- designed an integrated system: a nauts were to reach the station single-launch space station dubbed aboard a manned transport spacecraft Almaz (“diamond”) and a Transport called Siber (or Sever) (“north”), Logistics Spacecraft (Russian 2.1 Overview shown in figure 2-2. They would acronym TKS) for reaching it (see live in a habitation module and section 3.3). Chelomei’s three-stage Figure 2-1 is a space station family observe Earth from a “science- Proton booster would launch them tree depicting the evolutionary package” module. Korolev’s Vostok both. Almaz was to be equipped relationships described in this rocket (a converted ICBM) was with a crew capsule, radar remote- section. tapped to launch both Siber and the sensing apparatus for imaging the station modules. In 1965, Korolev Earth’s surface, cameras, two reentry 2.1.1 Early Concepts (1903, proposed a 90-ton space station to be capsules for returning data to Earth, 1962) launched by the N-1 rocket. It was and an antiaircraft cannon to defend to have had a docking module with against American attack.5 An ports for four Soyuz spacecraft.2, 3 interdepartmental commission The space station concept is very old approved the system in 1967. -
Exploring the Moon and Mars: Choices for the Nation
Exploring the Moon and Mars: Choices for the Nation July 1991 OTA-ISC-502 NTIS order #PB91-220046 Recommended Citation: U.S. Congress, Office of Technology AssessmenT Exploring the Moon andMars: Choices for the Nation, OTA-ISC-502 (Washington, DC: U.S. Government Printing Office, July 1991). For sale by the Superintendent of Documents U.S. Government Printing 0ffice, Washington, DC 20402-9325 (order form can be found in the back of this report) Foreword The United States has always been at the forefront of exploring the planets. U.S. space- craft have now journeyed near every planet in the solar system but Pluto, the most distant one. Its probes have also landed on the Moon and Mars. Magellan, the most recent of U.S. interplan- etary voyagers, has been returning thought-provoking, high-resolution radar images of the sur- face of Venus. Scientifically, the prospect of returning to the Moon and exploring Mars in greater detail is an exciting one. President George Bush’s proposal to establish a permanent lunar base and to send human crews to explore Mars is ambitious and would engage both scientists and engi- neers in challenging tasks. Yet it also raises a host of issues regarding the appropriate mix of humans and machines, timeliness, and costs of space exploration. This Nation faces a sobering variety of economic, environmental, and technological challenges over the next few decades, all of which will make major demands on the Federal budget and other national assets. Within this context, Congress will have to decide the appropriate pace and direction for the President’s space exploration proposal. -

2020 Consolidated Financial Statements
2020 Consolidated Financial Statements 16152 Genoa - Italia Via N. Lorenzi, 8 - Tel. +39 010 6551 - Fax +39 010 655 3411 [email protected] www.ansaldoenergia.com (*) This document has been translated into English from the Italian original solely for the convenience of international readers ANSALDO ENERGIA 2020 Consolidated Financial Statements Contents 7 SIGNIFICANT DATA 8 REPORT ON OPERATIONS 9 COVID-19 and its impacts on Ansaldo Energia Group’s consolidated financial statements 11 Main events of 2020 13 The Group and the Market 17 Financial results 18 Analysis of the financial position 23 Financial situation 25 Alternative “non-GAAP” performance indicators 26 Management performance 27 Production activities 30 Commercial activities 33 Organisational and process/product developments 35 Investments 37 Research and Development activities 39 Intellectual Property Rights 2020 40 Human resources 42 Environment, health and safety in the workplace 44 Quality 45 Information required as per Law 124/2017 46 Risk management 46 Guarantees given as part of the agreement for the sale of the Parent Company’s shares 47 Related party transactions 47 Performance outlook 48 CONSOLIDATED FINANCIAL STATEMENTS AS OF 31.12.2020 49 Consolidated Income Statement 50 Consolidated statement of comprehensive income 51 Consolidated Statement of financial position 52 Consolidated Statement of cash flows 53 Consolidated Statement of Changes in Equity 54 Reconciliation of the Parent’s equity and net result with consolidated figures as at 31 December 2020 55 NOTES TO THE CONSOLIDATED FINANCIAL STATEMENTS FOR THE FISCAL YEAR ENDED ON 31 DECEMBER 2020 55 1. General Information 56 2. Form, contents and accounting standards applied 57 3. -
HARALD MCPIKE, Plaintiff, V
Case 1:17-cv-00562-TSE-JFA Document 190 Filed 03/13/18 Page 1 of 36 PageID# 4826 IN THE UNITED STATES DISTRICT COURT FOR THE EASTERN DISTRICT OF VIRGINIA (Alexandria Division) HARALD MCPIKE, Plaintiff, v. Case No. 1:17cv562-TSE/JFA ZERO-GRAVITY HOLDINGS, INC. f/k/a SPACE ADVENTURES, LTD., THOMAS SHELLEY and ERIC ANDERSON, Defendants. MEMORANDUM IN SUPPORT OF DEFENDANT’S MOTION FOR SUMMARY JUDGMENT Pursuant to Local Rule 5, and this Court’s December 19, 2017 Joint Stipulated Protective Order, Defendant Zero-Gravity Holdings, Inc. provides notice that this filing refers to documents marked “CONFIDENTIAL” and therefore this public version has been provisionally filed with redactions to the Memorandum and Exhibits 7, 14, 16, 17, 18, 19, 21, 24, 25, 29, 30, and 31 with the designated “CONFIDENTIAL MATERIALS.” Unredacted versions have been filed contemporaneously UNDER SEAL. Case 1:17-cv-00562-TSE-JFA Document 190 Filed 03/13/18 Page 2 of 36 PageID# 4827 TABLE OF CONTENTS TABLE OF CONTENTS ................................................................................................................. i TABLE OF AUTHORITIES .......................................................................................................... ii INTRODUCTION .......................................................................................................................... 1 STATEMENT OF UNDISPUTED FACTS ................................................................................... 3 A. The Parties ............................................................................................................. -
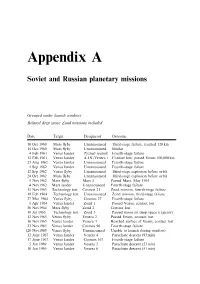
Appendix a Soviet and Russian Planetary Missions
Appendix A Soviet and Russian planetary missions Grouped under launch windows Related deep space Zond missions included Date Target Designator Outcome 10 Oct 1960 Mars ¯yby Unannounced Third-stage failure, reached 120 km 14 Oct 1960 Mars ¯yby Unannounced Similar 4 Feb 1961 Venus lander Tyzhuli sputnik Fourth-stage failure 12 Feb 1961 Venus lander A.I.S./Venera 1 Contact lost, passed Venus 100,000 km 25 Aug 1962 Venus lander Unannounced Fourth-stage failure 1 Sep 1962 Venus lander Unannounced Fourth-stage failure 12 Sep 1962 Venus ¯yby Unannounced Third-stage explosion before orbit 24 Oct 1962 Mars ¯yby Unannounced Third-stage explosion before orbit 1 Nov1962 Mars ¯yby Mars 1 Passed Mars, May 1963 4 Nov1962 Mars lander Unannounced Fourth-stage failure 11 Nov1963 Technology test Cosmos 21 Zond mission, fourth-stage failure 19 Feb 1964 Technology test Unannounced Zond mission, third-stage failure 27 Mar 1964 Venus ¯yby Cosmos 27 Fourth-stage failure 1 Apr 1964 Venus lander Zond 1 Passed Venus, contact lost 30 Nov1964 Mars ¯yby Zond 2 Contact lost 18 Jul 1965 Technology test Zond 3 Passed moon on deep space trajectory 12 Nov1965 Venus ¯yby Venera 2 Passed Venus, contact lost 16 Nov1965 Venus lander Venera 3 Reached surface of Venus, contact lost 23 Nov1965 Venus lander Cosmos 96 Fourth-stage failure (26 Nov1965 Venus ¯yby Unannounced Unable to launch during window) 12 June 1967 Venus lander Venera 4 Parachute descent (93 min) 17 June 1967 Venus lander Cosmos 167 Fourth-stage failure 5 Jan 1969 Venus lander Venera 5 Parachute descent (53 min) -

The Soviet Space Programme Through Museums and Memoirs
Asif A Siddiqi Privatising memory: the Soviet space programme through museums and memoirs Introduction In the years after Sputnik, Soviet museums dedicated to space exploration played an important role as 'custodians' of space history. Artefacts in museums presented and helped to create a unifying 'consensus narrative' that fostered a shared sense of identity among both participants and observers of the space programme, an identity that underpinned the myth of a Soviet space effort whose engine was heroism, ingenuity and, most of all, priority.l Their claims were buttressed by a huge body of literature issued by 'official' journalists who extolled the virtues of the Soviet space programme. The state sanctioned histories served as supporting texts for the museums, where carefully-selected artefacts, usually spacecraft that had achieved certain 'firsts' in the early history of space exploration, were displayed and celebrated as monuments to Soviet technocracy. (For a discussion of Soviet space museums and Soviet exhibitions at World's Fairs, see Cathleen Lewis's essay in this volume.) Three elements defined the memorialisation of Soviet space history during the late Soviet era, i.e. from the 1960s to the late 1980s. First, writers and curators eliminated contingency from the story: all successes were assumed to be inevitable and the idea of failure was made invisible. Second, under pressure from censors, writers and curators constructed a space of 'limited Visibility' for both actors and artefacts, i.e. only a few selected persons - usually cosmonauts - and objects were displayed to the public. Military domination of the Soviet space programme engendered a culture of enveloping secrecy over most of its participants, institutions and artefacts. -

National Aeronautics and Space Administration (NASA) Correspondence Between NASA and Energia Corporation Or Roscosmos, 2017-2019
Description of document: National Aeronautics and Space Administration (NASA) Correspondence between NASA and Energia Corporation or Roscosmos, 2017-2019 Requested date: 04-November-2019 Release date: 02-January-2020 Posted date: 08-June-2020 Source of document: FOIA Request NASA Headquarters 300 E Street, SW Room 5Q16 Washington, DC 20546 Fax: (202) 358-4332 Email: [email protected] The governmentattic.org web site (“the site”) is a First Amendment free speech web site, and is noncommercial and free to the public. The site and materials made available on the site, such as this file, are for reference only. The governmentattic.org web site and its principals have made every effort to make this information as complete and as accurate as possible, however, there may be mistakes and omissions, both typographical and in content. The governmentattic.org web site and its principals shall have neither liability nor responsibility to any person or entity with respect to any loss or damage caused, or alleged to have been caused, directly or indirectly, by the information provided on the governmentattic.org web site or in this file. The public records published on the site were obtained from government agencies using proper legal channels. Each document is identified as to the source. Any concerns about the contents of the site should be directed to the agency originating the document in question. GovernmentAttic.org is not responsible for the contents of documents published on the website. National Aeronautics and Space Administration Headquarters Washington, DC 20546-0001 Office of Communications January 2, 2020 FOIA: 20-HQ-F-00092 This is in response to your Freedom of Information Act (FOIA) request dated and received at the National Aeronautics and Space Administration (NASA) Headquarters FOIA Office on November 4, 2019.