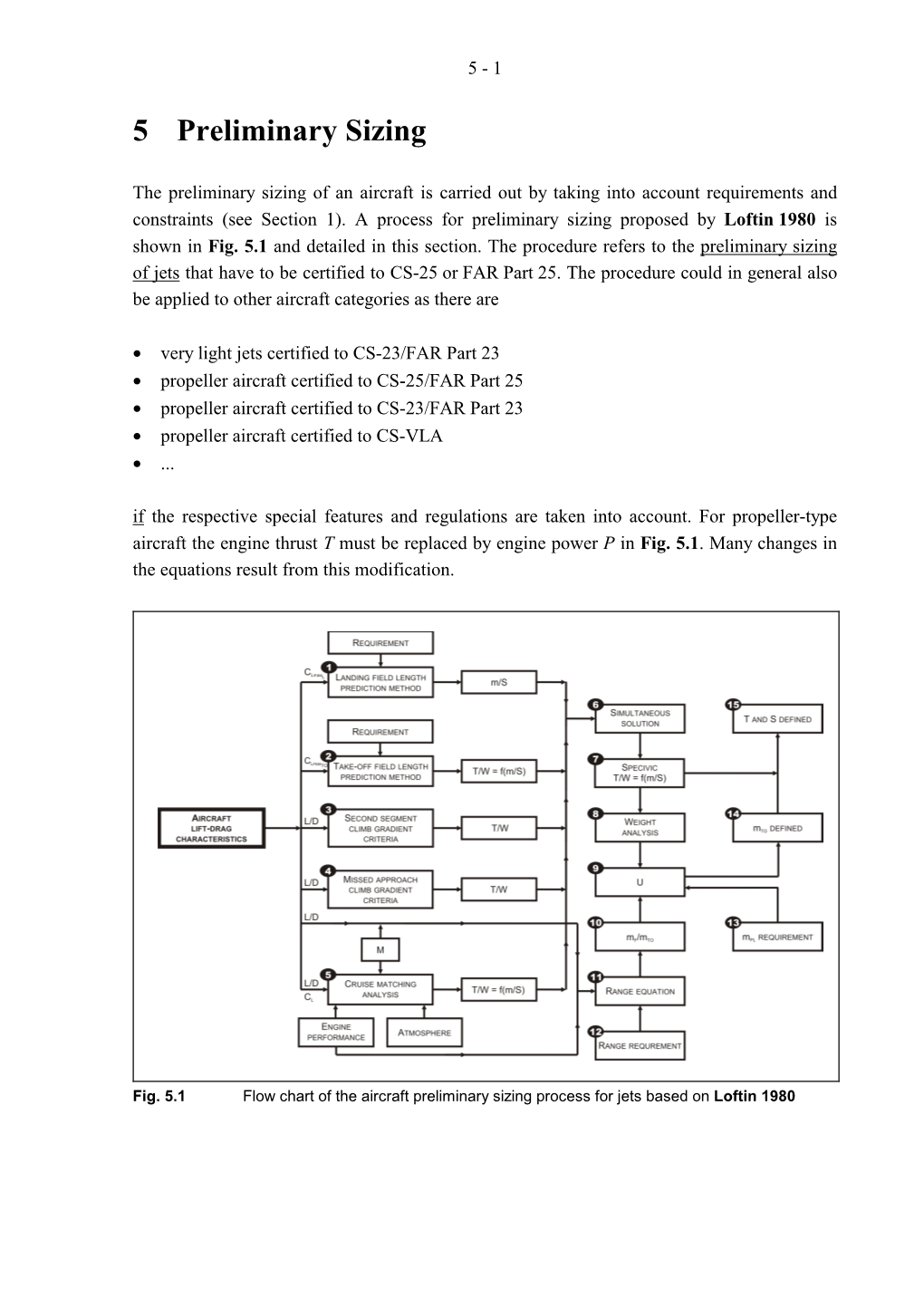
Aircraft Design --- Chapter 5: Preliminary Sizing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

E6bmanual2016.Pdf
® Electronic Flight Computer SPORTY’S E6B ELECTRONIC FLIGHT COMPUTER Sporty’s E6B Flight Computer is designed to perform 24 aviation functions and 20 standard conversions, and includes timer and clock functions. We hope that you enjoy your E6B Flight Computer. Its use has been made easy through direct path menu selection and calculation prompting. As you will soon learn, Sporty’s E6B is one of the most useful and versatile of all aviation computers. Copyright © 2016 by Sportsman’s Market, Inc. Version 13.16A page: 1 CONTENTS BEFORE USING YOUR E6B ...................................................... 3 DISPLAY SCREEN .................................................................... 4 PROMPTS AND LABELS ........................................................... 5 SPECIAL FUNCTION KEYS ....................................................... 7 FUNCTION MENU KEYS ........................................................... 8 ARITHMETIC FUNCTIONS ........................................................ 9 AVIATION FUNCTIONS ............................................................. 9 CONVERSIONS ....................................................................... 10 CLOCK FUNCTION .................................................................. 12 ADDING AND SUBTRACTING TIME ....................................... 13 TIMER FUNCTION ................................................................... 14 HEADING AND GROUND SPEED ........................................... 15 PRESSURE AND DENSITY ALTITUDE ................................... -

Business & Commercial Aviation
BUSINESS & COMMERCIAL AVIATION LEONARDO AW609 PERFORMANCE PLATEAUS OCEANIC APRIL 2020 $10.00 AviationWeek.com/BCA Business & Commercial Aviation AIRCRAFT UPDATE Leonardo AW609 Bringing tiltrotor technology to civil aviation FUEL PLANNING ALSO IN THIS ISSUE Part 91 Department Inspections Is It Airworthy? Oceanic Fuel Planning Who Says It’s Ready? APRIL 2020 VOL. 116 NO. 4 Performance Plateaus Digital Edition Copyright Notice The content contained in this digital edition (“Digital Material”), as well as its selection and arrangement, is owned by Informa. and its affiliated companies, licensors, and suppliers, and is protected by their respective copyright, trademark and other proprietary rights. Upon payment of the subscription price, if applicable, you are hereby authorized to view, download, copy, and print Digital Material solely for your own personal, non-commercial use, provided that by doing any of the foregoing, you acknowledge that (i) you do not and will not acquire any ownership rights of any kind in the Digital Material or any portion thereof, (ii) you must preserve all copyright and other proprietary notices included in any downloaded Digital Material, and (iii) you must comply in all respects with the use restrictions set forth below and in the Informa Privacy Policy and the Informa Terms of Use (the “Use Restrictions”), each of which is hereby incorporated by reference. Any use not in accordance with, and any failure to comply fully with, the Use Restrictions is expressly prohibited by law, and may result in severe civil and criminal penalties. Violators will be prosecuted to the maximum possible extent. You may not modify, publish, license, transmit (including by way of email, facsimile or other electronic means), transfer, sell, reproduce (including by copying or posting on any network computer), create derivative works from, display, store, or in any way exploit, broadcast, disseminate or distribute, in any format or media of any kind, any of the Digital Material, in whole or in part, without the express prior written consent of Informa. -

5.2 Drag Reduction Through Higher Wing Loading David L. Kohlman
5.2 Drag Reduction Through Higher Wing Loading David L. Kohlman University of Kansas |ntroduction The wing typically accounts for almost half of the wetted area of today's production light airplanes and approximately one-third of the total zero-lift or parasite drag. Thus the wing should be a primary focal point of any attempts to reduce drag of light aircraft with the most obvious configuration change being a reduction in wing area. Other possibilities involve changes in thickness, planform, and airfoil section. This paper will briefly discuss the effects of reducing wing area of typical light airplanes, constraints involved, and related configuration changes which may be necessary. Constraints and Benefits The wing area of current light airplanes is determined primarily by stall speed and/or climb performance requirements. Table I summarizes the resulting wing loading for a representative spectrum of single-engine airplanes. The maximum lift coefficient with full flaps, a constraint on wing size, is also listed. Note that wing loading (at maximum gross weight) ranges between about 10 and 20 psf, with most 4-place models averaging between 13 and 17. Maximum lift coefficient with full flaps ranges from 1.49 to 2.15. Clearly if CLmax can be increased, a corresponding decrease in wing area can be permitted with no change in stall speed. If total drag is not increased at climb speed, the change in wing area will not adversely affect climb performance either and cruise drag will be reduced. Though not related to drag, it is worthy of comment that the range of wing loading in Table I tends to produce a rather uncomfortable ride in turbulent air, as every light-plane pilot is well aware. -

The Difference Between Higher and Lower Flap Setting Configurations May Seem Small, but at Today's Fuel Prices the Savings Can Be Substantial
THE DIFFERENCE BETWEEN HIGHER AND LOWER FLAP SETTING CONFIGURATIONS MAY SEEM SMALL, BUT AT TODAY'S FUEL PRICES THE SAVINGS CAN BE SUBSTANTIAL. 24 AERO QUARTERLY QTR_04 | 08 Fuel Conservation Strategies: Takeoff and Climb By William Roberson, Senior Safety Pilot, Flight Operations; and James A. Johns, Flight Operations Engineer, Flight Operations Engineering This article is the third in a series exploring fuel conservation strategies. Every takeoff is an opportunity to save fuel. If each takeoff and climb is performed efficiently, an airline can realize significant savings over time. But what constitutes an efficient takeoff? How should a climb be executed for maximum fuel savings? The most efficient flights actually begin long before the airplane is cleared for takeoff. This article discusses strategies for fuel savings But times have clearly changed. Jet fuel prices fuel burn from brake release to a pressure altitude during the takeoff and climb phases of flight. have increased over five times from 1990 to 2008. of 10,000 feet (3,048 meters), assuming an accel Subse quent articles in this series will deal with At this time, fuel is about 40 percent of a typical eration altitude of 3,000 feet (914 meters) above the descent, approach, and landing phases of airline’s total operating cost. As a result, airlines ground level (AGL). In all cases, however, the flap flight, as well as auxiliarypowerunit usage are reviewing all phases of flight to determine how setting must be appropriate for the situation to strategies. The first article in this series, “Cost fuel burn savings can be gained in each phase ensure airplane safety. -

Business Opportunities in Aircraft Cabin Conversion and Refurbishing
Business Opportunities in Aircraft Cabin Conversion and Refurbishing Mihaela F. Niţă1 and Dieter Scholz2 Hamburg University of Applied Sciences, Berliner Tor 9, 20099 Hamburg, Germany This paper identifies several meaningful business opportunity cases in the area of aircraft cabin conversion and refurbishing and predicts the market volume and the world distribution for each of them: 1.) international cabins, 2.) domestic cabins, 3.) aircraft on operating lease, 4.) freighter conversions and 5.) VIP completions. This implies the determination of cabin modification/conversion scenarios, along with their duration and frequency. Factors driving the cabin conversion and refurbishing are identified. Several aircraft databases, containing the current world feet as well as the forecasted fleet for the next years, are analyzed. The results are obtained by creating a program able to read and analyze the gathered data. It is shown that about 38000 cabin redesigns will be undertaken within the next 20 years. About 2500 conversions from jetliners into freighters and 25000 cabin modifications at VIP standards will emerge on the market. The North American and European markets will keep providing good business opportunities in this area. The Asian market, however, is growing fast, and its very strong influence on demand puts it in the front rank for the next 20 years. Nomenclature agescenario_limit = aircraft age for which the refurbishing is no longer planned by the operator. dateaircraft_delivery = date of the aircraft first delivery datemodification -

Using an Autothrottle to Compare Techniques for Saving Fuel on A
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft Rebecca Marie Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Electrical and Computer Engineering Commons Recommended Citation Johnson, Rebecca Marie, "Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft" (2010). Graduate Theses and Dissertations. 11358. https://lib.dr.iastate.edu/etd/11358 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Using an autothrottle to compare techniques for saving fuel on A regional jet aircraft by Rebecca Marie Johnson A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Electrical Engineering Program of Study Committee: Umesh Vaidya, Major Professor Qingze Zou Baskar Ganapathayasubramanian Iowa State University Ames, Iowa 2010 Copyright c Rebecca Marie Johnson, 2010. All rights reserved. ii DEDICATION I gratefully acknowledge everyone who contributed to the successful completion of this research. Bill Piche, my supervisor at Rockwell Collins, was supportive from day one, as were many of my colleagues. I also appreciate the efforts of my thesis committee, Drs. Umesh Vaidya, Qingze Zou, and Baskar Ganapathayasubramanian. I would also like to thank Dr. -

CRUISE FLIGHT OPTIMIZATION of a COMMERCIAL AIRCRAFT with WINDS a Thesis Presented To
CRUISE FLIGHT OPTIMIZATION OF A COMMERCIAL AIRCRAFT WITH WINDS _______________________________________ A Thesis presented to the Faculty of the Graduate School at the University of Missouri-Columbia _______________________________________________________ In Partial Fulfillment of the Requirements for the Degree Master of Science _____________________________________________________ by STEPHEN ANSBERRY Dr. Craig Kluever, Thesis Supervisor MAY 2015 The undersigned, appointed by the dean of the Graduate School, have examined the thesis entitled CRUISE FLIGHT OPTMIZATION OF A COMMERCIAL AIRCRAFT WITH WINDS presented by Stephen Ansberry, a candidate for the degree of Master of Science, and hereby certify that, in their opinion, it is worthy of acceptance. Professor Craig Kluever Professor Roger Fales Professor Carmen Chicone ACKNOWLEDGEMENTS I would like to thank Dr. Kluever for his help and guidance through this thesis. I would like to thank my other panel professors, Dr. Chicone and Dr. Fales for their support. I would also like to thank Steve Nagel for his assistance with the engine theory and Tyler Shinn for his assistance with the computer program. ii TABLE OF CONTENTS ACKNOWLEDGEMENTS………………………………...………………………………………………ii LIST OF FIGURES………………………………………………………………………………………..iv LIST OF TABLES…………………………………………………………………………………….……v SYMBOLS....................................................................................................................................................vi ABSTRACT……………………………………………………………………………………………...viii 1. INTRODUCTION.....................................................................................................................................1 -

Predictability of Top of Descent Location for Operational Idle-Thrust Descents
Predictability of Top of Descent Location for Operational Idle-thrust Descents Laurel L. Stell∗ NASA Ames Research Center, Moffett Field, CA 94035 To enable arriving aircraft to fly optimized descents computed by the flight management system (FMS) in congested airspace, ground automation must accurately predict descent trajectories. To support development of the trajectory predictor and its uncertainty mod- els, commercial flights executed idle-thrust descents at a specified descent speed, and the recorded data included the specified descent speed profile, aircraft weight, and the winds entered into the FMS as well as the radar data. The FMS computed the intended descent path assuming idle thrust after top of descent (TOD), and the controllers and pilots then endeavored to allow the FMS to fly the descent to the meter fix with minimal human intervention. The horizontal flight path, cruise and meter fix altitudes, and actual TOD location were extracted from the radar data. Using approximately 70 descents each in Boeing 757 and Airbus 319/320 aircraft, multiple regression estimated TOD location as a linear function of the available predictive factors. The cruise and meter fix altitudes, descent speed, and wind clearly improve goodness of fit. The aircraft weight improves fit for the Airbus descents but not for the B757. Except for a few statistical outliers, the residuals have absolute value less than 5 nmi. Thus, these predictive factors adequately explain the TOD location, which indicates the data do not include excessive noise. Nomenclature b Least -

Emergency Procedures C172
EMERGENCY PROCEDURES NON CRITICAL ACTION June 2015 1. Maintain aircraft control. Table of Contents 2. Analyze the situation and take proper action. C 172 3.Land as soon as conditions permit NON CRITICAL ACTION PROCEDURES E-2 GROUND OPERATION EMERGENCIES GROUND OPERATION EMERGENCIES E-2 Emergency Engine Shutdown on the Ground Emergency Engine Shutdown on the Ground E-2 1. FUEL SELECTOR -------------------------------- OFF Engine Fire During Start E-2 2. MIXTURE ---------------------------- IDLE CUTOFF TAKEOFF EMERGENCIES E-2 3. IGNITION ------------------------------------------ OFF Abort E-2 4. MASTER SWITCH ------------------------------- OFF IN-FLIGHT EMERGENCIES E-3 Engine Failure Immediately After T/O E-3 Engine Fire during Start Engine Failure In Flt - Forced Landing E-3 If Engine starts Engine Fire During Flight E-4 1. POWER ------------------------------------- 1700 RPM Emergency Descent E-4 2. ENGINE -------------------------------- SHUTDOWN Electrical Fire/High Ammeter E-4 If Engine fails to start Negative Ammeter Reading E-4 1. CRANKING ----------------------------- CONTINUE Smoke and Fume Elimination E-5 2. MIXTURE --------------------------- IDLE CUT-OFF Oil System Malfunction E-4 3 THROTTLE ----------------------------- FULL OPEN Structural Damage or Controllability Check E-5 4. ENGINE -------------------------------- SHUTDOWN Recall E-6 FUEL SELECTOR ------ OFF Lost Procedures E-6 IGNITION SWITCH --- OFF Radio Failure E-7 MASTER SWITCH ----- OFF Diversions E-8 LANDING EMERGENCIES E-9 TAKEOFF EMERGENCIES Landing with flat tire E-9 ABORT E-9 LIGHT SIGNALS 1. THROTTLE -------------------------------------- IDLE 2. BRAKES ----------------------------- AS REQUIRED E-2 E-1 IN-FLIGHT EMERGENCIES Engine Fire During Flight Engine Failure Immediately After Takeoff 1. FUEL SELECTOR --------------------------------------- OFF 1. BEST GLIDE ------------------------------------ ESTABLISH 2. MIXTURE------------------------------------ IDLE CUTOFF 2. FUEL SELECTOR ----------------------------------------- OFF 3. -

Design of a Light Business Jet Family David C
Design of a Light Business Jet Family David C. Alman Andrew R. M. Hoeft Terry H. Ma AIAA : 498858 AIAA : 494351 AIAA : 820228 Cameron B. McMillan Jagadeesh Movva Christopher L. Rolince AIAA : 486025 AIAA : 738175 AIAA : 808866 I. Acknowledgements We would like to thank Mr. Carl Johnson, Dr. Neil Weston, and the numerous Georgia Tech faculty and students who have assisted in our personal and aerospace education, and this project specifically. In addition, the authors would like to individually thank the following: David C. Alman: My entire family, but in particular LCDR Allen E. Alman, USNR (BSAE Purdue ’49) and father James D. Alman (BSAE Boston University ’87) for instilling in me a love for aircraft, and Karrin B. Alman for being a wonderful mother and reading to me as a child. I’d also like to thank my friends, including brother Mark T. Alman, who have provided advice, laughs, and made life more fun. Also, I am forever indebted to Roe and Penny Stamps and the Stamps President’s Scholarship Program for allowing me to attend Georgia Tech and to the Georgia Tech Research Institute for providing me with incredible opportunities to learn and grow as an engineer. Lastly, I’d like to thank the countless mentors who have believed in me, helped me learn, and Page i provided the advice that has helped form who I am today. Andrew R. M. Hoeft: As with every undertaking in my life, my involvement on this project would not have been possible without the tireless support of my family and friends. -

Subsonic Aircraft Wing Conceptual Design Synthesis and Analysis
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by GSSRR.ORG: International Journals: Publishing Research Papers in all Fields International Journal of Sciences: Basic and Applied Research (IJSBAR) ISSN 2307-4531 (Print & Online) http://gssrr.org/index.php?journal=JournalOfBasicAndApplied --------------------------------------------------------------------------------------------------------------------------- Subsonic Aircraft Wing Conceptual Design Synthesis and Analysis Abderrahmane BADIS Electrical and Electronic Communication Engineer from UMBB (Ex.INELEC) Independent Electronics, Aeronautics, Propulsion, Well Logging and Software Design Research Engineer Takerboust, Aghbalou, Bouira 10007, Algeria [email protected] Abstract This paper exposes a simplified preliminary conceptual integrated method to design an aircraft wing in subsonic speeds up to Mach 0.85. The proposed approach is integrated, as it allows an early estimation of main aircraft aerodynamic features, namely the maximum lift-to-drag ratio and the total parasitic drag. First, the influence of the Lift and Load scatterings on the overall performance characteristics of the wing are discussed. It is established that the optimization is achieved by designing a wing geometry that yields elliptical lift and load distributions. Second, the reference trapezoidal wing is considered the base line geometry used to outline the wing shape layout. As such, the main geometrical parameters and governing relations for a trapezoidal wing are -
Aircraft Performance (R18a2110)
AERONAUTICAL ENGINEERING – MRCET (UGC Autonomous) AIRCRAFT PERFORMANCE (R18A2110) COURSE FILE II B. Tech II Semester (2019-2020) Prepared By Ms. D.SMITHA, Assoc. Prof Department of Aeronautical Engineering MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Affiliated to JNTU, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India. AERONAUTICAL ENGINEERING – MRCET (UGC Autonomous) MRCET VISION • To become a model institution in the fields of Engineering, Technology and Management. • To have a perfect synchronization of the ideologies of MRCET with challenging demands of International Pioneering Organizations. MRCET MISSION To establish a pedestal for the integral innovation, team spirit, originality and competence in the students, expose them to face the global challenges and become pioneers of Indian vision of modern society . MRCET QUALITY POLICY. • To pursue continual improvement of teaching learning process of Undergraduate and Post Graduate programs in Engineering & Management vigorously. • To provide state of art infrastructure and expertise to impart the quality education. [II year – II sem ] Page 2 AERONAUTICAL ENGINEERING – MRCET (UGC Autonomous) PROGRAM OUTCOMES (PO’s) Engineering Graduates will be able to: 1. Engineering knowledge: Apply the knowledge of mathematics, science, engineering fundamentals, and an engineering specialization to the solution