Exploring and Analyzing the Real Impact of Modern On-Package Memory on HPC Scientific Kernels
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Data Storage the CPU-Memory
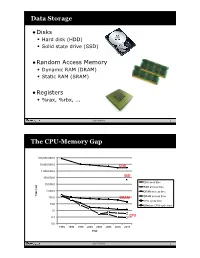
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -
Managing the Memory Hierarchy
Managing the Memory Hierarchy Jeffrey S. Vetter Sparsh Mittal, Joel Denny, Seyong Lee Presented to SOS20 Asheville 24 Mar 2016 ORNL is managed by UT-Battelle for the US Department of Energy http://ft.ornl.gov [email protected] Exascale architecture targets circa 2009 2009 Exascale Challenges Workshop in San Diego Attendees envisioned two possible architectural swim lanes: 1. Homogeneous many-core thin-node system 2. Heterogeneous (accelerator + CPU) fat-node system System attributes 2009 “Pre-Exascale” “Exascale” System peak 2 PF 100-200 PF/s 1 Exaflop/s Power 6 MW 15 MW 20 MW System memory 0.3 PB 5 PB 32–64 PB Storage 15 PB 150 PB 500 PB Node performance 125 GF 0.5 TF 7 TF 1 TF 10 TF Node memory BW 25 GB/s 0.1 TB/s 1 TB/s 0.4 TB/s 4 TB/s Node concurrency 12 O(100) O(1,000) O(1,000) O(10,000) System size (nodes) 18,700 500,000 50,000 1,000,000 100,000 Node interconnect BW 1.5 GB/s 150 GB/s 1 TB/s 250 GB/s 2 TB/s IO Bandwidth 0.2 TB/s 10 TB/s 30-60 TB/s MTTI day O(1 day) O(0.1 day) 2 Memory Systems • Multimode memories – Fused, shared memory – Scratchpads – Write through, write back, etc – Virtual v. Physical, paging strategies – Consistency and coherence protocols • 2.5D, 3D Stacking • HMC, HBM/2/3, LPDDR4, GDDR5, WIDEIO2, etc https://www.micron.com/~/media/track-2-images/content-images/content_image_hmc.jpg?la=en • New devices (ReRAM, PCRAM, Xpoint) J.S. -

Performance Impact of Memory Channels on Sparse and Irregular Algorithms
Performance Impact of Memory Channels on Sparse and Irregular Algorithms Oded Green1,2, James Fox2, Jeffrey Young2, Jun Shirako2, and David Bader3 1NVIDIA Corporation — 2Georgia Institute of Technology — 3New Jersey Institute of Technology Abstract— Graph processing is typically considered to be a Graph algorithms are typically latency-bound if there is memory-bound rather than compute-bound problem. One com- not enough parallelism to saturate the memory subsystem. mon line of thought is that more available memory bandwidth However, the growth in parallelism for shared-memory corresponds to better graph processing performance. However, in this work we demonstrate that the key factor in the utilization systems brings into question whether graph algorithms are of the memory system for graph algorithms is not necessarily still primarily latency-bound. Getting peak or near-peak the raw bandwidth or even the latency of memory requests. bandwidth of current memory subsystems requires highly Instead, we show that performance is proportional to the parallel applications as well as good spatial and temporal number of memory channels available to handle small data memory reuse. The lack of spatial locality in sparse and transfers with limited spatial locality. Using several widely used graph frameworks, including irregular algorithms means that prefetched cache lines have Gunrock (on the GPU) and GAPBS & Ligra (for CPUs), poor data reuse and that the effective bandwidth is fairly low. we evaluate key graph analytics kernels using two unique The introduction of high-bandwidth memories like HBM and memory hierarchies, DDR-based and HBM/MCDRAM. Our HMC have not yet closed this inefficiency gap for latency- results show that the differences in the peak bandwidths sensitive accesses [19]. -

インテル® Parallel Studio XE 2020 リリースノート
インテル® Parallel Studio XE 2020 2019 年 12 月 5 日 内容 1 概要 ..................................................................................................................................................... 2 2 製品の内容 ........................................................................................................................................ 3 2.1 インテルが提供するデバッグ・ソリューションの追加情報 ..................................................... 5 2.2 Microsoft* Visual Studio* Shell の提供終了 ........................................................................ 5 2.3 インテル® Software Manager .................................................................................................... 5 2.4 サポートするバージョンとサポートしないバージョン ............................................................ 5 3 新機能 ................................................................................................................................................ 6 3.1 インテル® Xeon Phi™ 製品ファミリーのアップデート ......................................................... 12 4 動作環境 .......................................................................................................................................... 13 4.1 プロセッサーの要件 ...................................................................................................................... 13 4.2 ディスク空き容量の要件 .............................................................................................................. 13 4.3 オペレーティング・システムの要件 ............................................................................................. 13 -
Embedded DRAM
Embedded DRAM Raviprasad Kuloor Semiconductor Research and Development Centre, Bangalore IBM Systems and Technology Group DRAM Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example References Slide 1 Acknowledgement • John Barth, IBM SRDC for most of the slides content • Madabusi Govindarajan • Subramanian S. Iyer • Many Others Slide 2 Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example Slide 3 Memory Classification revisited Slide 4 Motivation for a memory hierarchy – infinite memory Memory store Processor Infinitely fast Infinitely large Cycles per Instruction Number of processor clock cycles (CPI) = required per instruction CPI[ ∞ cache] Finite memory speed Memory store Processor Finite speed Infinite size CPI = CPI[∞ cache] + FCP Finite cache penalty Locality of reference – spatial and temporal Temporal If you access something now you’ll need it again soon e.g: Loops Spatial If you accessed something you’ll also need its neighbor e.g: Arrays Exploit this to divide memory into hierarchy Hit L2 L1 (Slow) Processor Miss (Fast) Hit Register Cache size impacts cycles-per-instruction Access rate reduces Slower memory is sufficient Cache size impacts cycles-per-instruction For a 5GHz -
Introduction to High Performance Computing
Introduction to High Performance Computing Shaohao Chen Research Computing Services (RCS) Boston University Outline • What is HPC? Why computer cluster? • Basic structure of a computer cluster • Computer performance and the top 500 list • HPC for scientific research and parallel computing • National-wide HPC resources: XSEDE • BU SCC and RCS tutorials What is HPC? • High Performance Computing (HPC) refers to the practice of aggregating computing power in order to solve large problems in science, engineering, or business. • Purpose of HPC: accelerates computer programs, and thus accelerates work process. • Computer cluster: A set of connected computers that work together. They can be viewed as a single system. • Similar terminologies: supercomputing, parallel computing. • Parallel computing: many computations are carried out simultaneously, typically computed on a computer cluster. • Related terminologies: grid computing, cloud computing. Computing power of a single CPU chip • Moore‘s law is the observation that the computing power of CPU doubles approximately every two years. • Nowadays the multi-core technique is the key to keep up with Moore's law. Why computer cluster? • Drawbacks of increasing CPU clock frequency: --- Electric power consumption is proportional to the cubic of CPU clock frequency (ν3). --- Generates more heat. • A drawback of increasing the number of cores within one CPU chip: --- Difficult for heat dissipation. • Computer cluster: connect many computers with high- speed networks. • Currently computer cluster is the best solution to scale up computer power. • Consequently software/programs need to be designed in the manner of parallel computing. Basic structure of a computer cluster • Cluster – a collection of many computers/nodes. • Rack – a closet to hold a bunch of nodes. -

Applying the Roofline Performance Model to the Intel Xeon Phi Knights Landing Processor
Applying the Roofline Performance Model to the Intel Xeon Phi Knights Landing Processor Douglas Doerfler, Jack Deslippe, Samuel Williams, Leonid Oliker, Brandon Cook, Thorsten Kurth, Mathieu Lobet, Tareq Malas, Jean-Luc Vay, and Henri Vincenti Lawrence Berkeley National Laboratory {dwdoerf, jrdeslippe, swwilliams, loliker, bgcook, tkurth, mlobet, tmalas, jlvay, hvincenti}@lbl.gov Abstract The Roofline Performance Model is a visually intuitive method used to bound the sustained peak floating-point performance of any given arithmetic kernel on any given processor architecture. In the Roofline, performance is nominally measured in floating-point operations per second as a function of arithmetic intensity (operations per byte of data). In this study we determine the Roofline for the Intel Knights Landing (KNL) processor, determining the sustained peak memory bandwidth and floating-point performance for all levels of the memory hierarchy, in all the different KNL cluster modes. We then determine arithmetic intensity and performance for a suite of application kernels being targeted for the KNL based supercomputer Cori, and make comparisons to current Intel Xeon processors. Cori is the National Energy Research Scientific Computing Center’s (NERSC) next generation supercomputer. Scheduled for deployment mid-2016, it will be one of the earliest and largest KNL deployments in the world. 1 Introduction Moving an application to a new architecture is a challenge, not only in porting of the code, but in tuning and extracting maximum performance. This is especially true with the introduction of the latest manycore and GPU-accelerated architec- tures, as they expose much finer levels of parallelism that can be a challenge for applications to exploit in their current form. -

Case Study on Integrated Architecture for In-Memory and In-Storage Computing
electronics Article Case Study on Integrated Architecture for In-Memory and In-Storage Computing Manho Kim 1, Sung-Ho Kim 1, Hyuk-Jae Lee 1 and Chae-Eun Rhee 2,* 1 Department of Electrical Engineering, Seoul National University, Seoul 08826, Korea; [email protected] (M.K.); [email protected] (S.-H.K.); [email protected] (H.-J.L.) 2 Department of Information and Communication Engineering, Inha University, Incheon 22212, Korea * Correspondence: [email protected]; Tel.: +82-32-860-7429 Abstract: Since the advent of computers, computing performance has been steadily increasing. Moreover, recent technologies are mostly based on massive data, and the development of artificial intelligence is accelerating it. Accordingly, various studies are being conducted to increase the performance and computing and data access, together reducing energy consumption. In-memory computing (IMC) and in-storage computing (ISC) are currently the most actively studied architectures to deal with the challenges of recent technologies. Since IMC performs operations in memory, there is a chance to overcome the memory bandwidth limit. ISC can reduce energy by using a low power processor inside storage without an expensive IO interface. To integrate the host CPU, IMC and ISC harmoniously, appropriate workload allocation that reflects the characteristics of the target application is required. In this paper, the energy and processing speed are evaluated according to the workload allocation and system conditions. The proof-of-concept prototyping system is implemented for the integrated architecture. The simulation results show that IMC improves the performance by 4.4 times and reduces total energy by 4.6 times over the baseline host CPU. -

The Memory Hierarchy
Chapter 6 The Memory Hierarchy To this point in our study of systems, we have relied on a simple model of a computer system as a CPU that executes instructions and a memory system that holds instructions and data for the CPU. In our simple model, the memory system is a linear array of bytes, and the CPU can access each memory location in a constant amount of time. While this is an effective model as far as it goes, it does not reflect the way that modern systems really work. In practice, a memory system is a hierarchy of storage devices with different capacities, costs, and access times. CPU registers hold the most frequently used data. Small, fast cache memories nearby the CPU act as staging areas for a subset of the data and instructions stored in the relatively slow main memory. The main memory stages data stored on large, slow disks, which in turn often serve as staging areas for data stored on the disks or tapes of other machines connected by networks. Memory hierarchies work because well-written programs tend to access the storage at any particular level more frequently than they access the storage at the next lower level. So the storage at the next level can be slower, and thus larger and cheaper per bit. The overall effect is a large pool of memory that costs as much as the cheap storage near the bottom of the hierarchy, but that serves data to programs at the rate of the fast storage near the top of the hierarchy. -
Lecture 10: Memory Hierarchy -- Memory Technology and Principal of Locality
Lecture 10: Memory Hierarchy -- Memory Technology and Principal of Locality CSCE 513 Computer Architecture Department of Computer Science and Engineering Yonghong Yan [email protected] https://passlab.github.io/CSCE513 1 Topics for Memory Hierarchy • Memory Technology and Principal of Locality – CAQA: 2.1, 2.2, B.1 – COD: 5.1, 5.2 • Cache Organization and Performance – CAQA: B.1, B.2 – COD: 5.2, 5.3 • Cache Optimization – 6 Basic Cache Optimization Techniques • CAQA: B.3 – 10 Advanced Optimization Techniques • CAQA: 2.3 • Virtual Memory and Virtual Machine – CAQA: B.4, 2.4; COD: 5.6, 5.7 – Skip for this course 2 The Big Picture: Where are We Now? Processor Input Control Memory Datapath Output • Memory system – Supplying data on time for computation (speed) – Large enough to hold everything needed (capacity) 3 Overview • Programmers want unlimited amounts of memory with low latency • Fast memory technology is more expensive per bit than slower memory • Solution: organize memory system into a hierarchy – Entire addressable memory space available in largest, slowest memory – Incrementally smaller and faster memories, each containing a subset of the memory below it, proceed in steps up toward the processor • Temporal and spatial locality insures that nearly all references can be found in smaller memories – Gives the allusion of a large, fast memory being presented to the processor 4 Memory Hierarchy Memory Hierarchy 5 Memory Technology • Random Access: access time is the same for all locations • DRAM: Dynamic Random Access Memory – High density, low power, cheap, slow – Dynamic: need to be “refreshed” regularly – 50ns – 70ns, $20 – $75 per GB • SRAM: Static Random Access Memory – Low density, high power, expensive, fast – Static: content will last “forever”(until lose power) – 0.5ns – 2.5ns, $2000 – $5000 per GB Ideal memory: • Magnetic disk • Access time of SRAM – 5ms – 20ms, $0.20 – $2 per GB • Capacity and cost/GB of disk 6 Static RAM (SRAM) 6-Transistor Cell – 1 Bit 6-Transistor SRAM Cell word word 0 1 (row select) 0 1 bit bit bit bit • Write: 1. -
Introduction to Intel Xeon Phi (“Knights Landing”) on Cori
Introduction to Intel Xeon Phi (“Knights Landing”) on Cori" Brandon Cook! Brian Friesen" 2017 June 9 - 1 - Knights Landing is here!" • KNL nodes installed in Cori in 2016 • “Pre-produc=on” for ~ 1 year – No charge for using KNL nodes – Limited access (un7l now!) – Intermi=ent down7me – Frequent so@ware changes • KNL nodes on Cori will soon enter produc=on – Charging Begins 2017 July 1 - 2 - Knights Landing overview" Knights Landing: Next Intel® Xeon Phi™ Processor Intel® Many-Core Processor targeted for HPC and Supercomputing First self-boot Intel® Xeon Phi™ processor that is binary compatible with main line IA. Boots standard OS. Significant improvement in scalar and vector performance Integration of Memory on package: innovative memory architecture for high bandwidth and high capacity Integration of Fabric on package Three products KNL Self-Boot KNL Self-Boot w/ Fabric KNL Card (Baseline) (Fabric Integrated) (PCIe-Card) Potential future options subject to change without notice. All timeframes, features, products and dates are preliminary forecasts and subject to change without further notification. - 3 - Knights Landing overview TILE CHA 2 VPU 2 VPU Knights Landing Overview 1MB L2 Core Core 2 x16 X4 MCDRAM MCDRAM 1 x4 DMI MCDRAM MCDRAM Chip: 36 Tiles interconnected by 2D Mesh Tile: 2 Cores + 2 VPU/core + 1 MB L2 EDC EDC PCIe D EDC EDC M Gen 3 3 I 3 Memory: MCDRAM: 16 GB on-package; High BW D Tile D D D DDR4: 6 channels @ 2400 up to 384GB R R 4 36 Tiles 4 IO: 36 lanes PCIe Gen3. 4 lanes of DMI for chipset C DDR MC connected by DDR MC C Node: 1-Socket only H H A 2D Mesh A Fabric: Omni-Path on-package (not shown) N Interconnect N N N E E L L Vector Peak Perf: 3+TF DP and 6+TF SP Flops S S Scalar Perf: ~3x over Knights Corner EDC EDC misc EDC EDC Streams Triad (GB/s): MCDRAM : 400+; DDR: 90+ Source Intel: All products, computer systems, dates and figures specified are preliminary based on current expectations, and are subject to change without notice. -
Chapter 2: Memory Hierarchy Design
Computer Architecture A Quantitative Approach, Fifth Edition Chapter 2 Memory Hierarchy Design Copyright © 2012, Elsevier Inc. All rights reserved. 1 Contents 1. Memory hierarchy 1. Basic concepts 2. Design techniques 2. Caches 1. Types of caches: Fully associative, Direct mapped, Set associative 2. Ten optimization techniques 3. Main memory 1. Memory technology 2. Memory optimization 3. Power consumption 4. Memory hierarchy case studies: Opteron, Pentium, i7. 5. Virtual memory 6. Problem solving dcm 2 Introduction Introduction Programmers want very large memory with low latency Fast memory technology is more expensive per bit than slower memory Solution: organize memory system into a hierarchy Entire addressable memory space available in largest, slowest memory Incrementally smaller and faster memories, each containing a subset of the memory below it, proceed in steps up toward the processor Temporal and spatial locality insures that nearly all references can be found in smaller memories Gives the allusion of a large, fast memory being presented to the processor Copyright © 2012, Elsevier Inc. All rights reserved. 3 Memory hierarchy Processor L1 Cache L2 Cache L3 Cache Main Memory Latency Hard Drive or Flash Capacity (KB, MB, GB, TB) Copyright © 2012, Elsevier Inc. All rights reserved. 4 PROCESSOR L1: I-Cache D-Cache I-Cache instruction cache D-Cache data cache U-Cache unified cache L2: U-Cache Different functional units fetch information from I-cache and D-cache: decoder and L3: U-Cache scheduler operate with I- cache, but integer execution unit and floating-point unit Main: Main Memory communicate with D-cache. Copyright © 2012, Elsevier Inc. All rights reserved.