The Real Projective Spaces in Homotopy Type Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Differentiable Manifolds
Prof. A. Cattaneo Institut f¨urMathematik FS 2018 Universit¨atZ¨urich Differentiable Manifolds Solutions to Exercise Sheet 1 p Exercise 1 (A non-differentiable manifold). Consider R with the atlas f(R; id); (R; x 7! sgn(x) x)g. Show R with this atlas is a topological manifold but not a differentiable manifold. p Solution: This follows from the fact that the transition function x 7! sgn(x) x is a homeomor- phism but not differentiable at 0. Exercise 2 (Stereographic projection). Let f : Sn − f(0; :::; 0; 1)g ! Rn be the stereographic projection from N = (0; :::; 0; 1). More precisely, f sends a point p on Sn different from N to the intersection f(p) of the line Np passing through N and p with the equatorial plane xn+1 = 0, as shown in figure 1. Figure 1: Stereographic projection of S2 (a) Find an explicit formula for the stereographic projection map f. (b) Find an explicit formula for the inverse stereographic projection map f −1 (c) If S = −N, U = Sn − N, V = Sn − S and g : Sn ! Rn is the stereographic projection from S, then show that (U; f) and (V; g) form a C1 atlas of Sn. Solution: We show each point separately. (a) Stereographic projection f : Sn − f(0; :::; 0; 1)g ! Rn is given by 1 f(x1; :::; xn+1) = (x1; :::; xn): 1 − xn+1 (b) The inverse stereographic projection f −1 is given by 1 f −1(y1; :::; yn) = (2y1; :::; 2yn; kyk2 − 1): kyk2 + 1 2 Pn i 2 Here kyk = i=1(y ) . -

Algebraic K-Theory and Equivariant Homotopy Theory
Algebraic K-Theory and Equivariant Homotopy Theory Vigleik Angeltveit (Australian National University), Andrew J. Blumberg (University of Texas at Austin), Teena Gerhardt (Michigan State University), Michael Hill (University of Virginia), and Tyler Lawson (University of Minnesota) February 12- February 17, 2012 1 Overview of the Field The study of the algebraic K-theory of rings and schemes has been revolutionized over the past two decades by the development of “trace methods”. Following ideas of Goodwillie, Bokstedt¨ and Bokstedt-Hsiang-¨ Madsen developed topological analogues of Hochschild homology and cyclic homology and a “trace map” out of K-theory that lands in these theories [15, 8, 9]. The fiber of this map can often be understood (by work of McCarthy and Dundas) [27, 13]. Topological Hochschild homology (THH) has a natural circle action, and topological cyclic homology (TC) is relatively computable using the methods of equivariant stable homotopy theory. Starting from Quillen’s computation of the K-theory of finite fields [28], Hesselholt and Madsen used TC to make extensive computations in K-theory [16, 17], in particular verifying certain cases of the Quillen-Lichtenbaum conjecture. As a consequence of these developments, the modern study of algebraic K-theory is deeply intertwined with development of computational tools and foundations in equivariant stable homotopy theory. At the same time, there has been a flurry of renewed interest and activity in equivariant homotopy theory motivated by the nature of the Hill-Hopkins-Ravenel solution to the Kervaire invariant problem [19]. The construction of the norm functor from H-spectra to G-spectra involves exploiting a little-known aspect of the equivariant stable category from a novel perspective, and this has begun to lead to a variety of analyses. -

Examples of Manifolds
Examples of Manifolds Example 1 (Open Subset of IRn) Any open subset, O, of IRn is a manifold of dimension n. One possible atlas is A = (O, ϕid) , where ϕid is the identity map. That is, ϕid(x) = x. n Of course one possible choice of O is IR itself. Example 2 (The Circle) The circle S1 = (x,y) ∈ IR2 x2 + y2 = 1 is a manifold of dimension one. One possible atlas is A = {(U , ϕ ), (U , ϕ )} where 1 1 1 2 1 y U1 = S \{(−1, 0)} ϕ1(x,y) = arctan x with − π < ϕ1(x,y) <π ϕ1 1 y U2 = S \{(1, 0)} ϕ2(x,y) = arctan x with 0 < ϕ2(x,y) < 2π U1 n n n+1 2 2 Example 3 (S ) The n–sphere S = x =(x1, ··· ,xn+1) ∈ IR x1 +···+xn+1 =1 n A U , ϕ , V ,ψ i n is a manifold of dimension . One possible atlas is 1 = ( i i) ( i i) 1 ≤ ≤ +1 where, for each 1 ≤ i ≤ n + 1, n Ui = (x1, ··· ,xn+1) ∈ S xi > 0 ϕi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n Vi = (x1, ··· ,xn+1) ∈ S xi < 0 ψi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n So both ϕi and ψi project onto IR , viewed as the hyperplane xi = 0. Another possible atlas is n n A2 = S \{(0, ··· , 0, 1)}, ϕ , S \{(0, ··· , 0, −1)},ψ where 2x1 2xn ϕ(x , ··· ,xn ) = , ··· , 1 +1 1−xn+1 1−xn+1 2x1 2xn ψ(x , ··· ,xn ) = , ··· , 1 +1 1+xn+1 1+xn+1 are the stereographic projections from the north and south poles, respectively. -

Simple Infinite Presentations for the Mapping Class Group of a Compact
SIMPLE INFINITE PRESENTATIONS FOR THE MAPPING CLASS GROUP OF A COMPACT NON-ORIENTABLE SURFACE RYOMA KOBAYASHI Abstract. Omori and the author [6] have given an infinite presentation for the mapping class group of a compact non-orientable surface. In this paper, we give more simple infinite presentations for this group. 1. Introduction For g ≥ 1 and n ≥ 0, we denote by Ng,n the closure of a surface obtained by removing disjoint n disks from a connected sum of g real projective planes, and call this surface a compact non-orientable surface of genus g with n boundary components. We can regard Ng,n as a surface obtained by attaching g M¨obius bands to g boundary components of a sphere with g + n boundary components, as shown in Figure 1. We call these attached M¨obius bands crosscaps. Figure 1. A model of a non-orientable surface Ng,n. The mapping class group M(Ng,n) of Ng,n is defined as the group consisting of isotopy classes of all diffeomorphisms of Ng,n which fix the boundary point- wise. M(N1,0) and M(N1,1) are trivial (see [2]). Finite presentations for M(N2,0), M(N2,1), M(N3,0) and M(N4,0) ware given by [9], [1], [14] and [16] respectively. Paris-Szepietowski [13] gave a finite presentation of M(Ng,n) with Dehn twists and arXiv:2009.02843v1 [math.GT] 7 Sep 2020 crosscap transpositions for g + n > 3 with n ≤ 1. Stukow [15] gave another finite presentation of M(Ng,n) with Dehn twists and one crosscap slide for g + n > 3 with n ≤ 1, applying Tietze transformations for the presentation of M(Ng,n) given in [13]. -

An Introduction to Topology the Classification Theorem for Surfaces by E
An Introduction to Topology An Introduction to Topology The Classification theorem for Surfaces By E. C. Zeeman Introduction. The classification theorem is a beautiful example of geometric topology. Although it was discovered in the last century*, yet it manages to convey the spirit of present day research. The proof that we give here is elementary, and its is hoped more intuitive than that found in most textbooks, but in none the less rigorous. It is designed for readers who have never done any topology before. It is the sort of mathematics that could be taught in schools both to foster geometric intuition, and to counteract the present day alarming tendency to drop geometry. It is profound, and yet preserves a sense of fun. In Appendix 1 we explain how a deeper result can be proved if one has available the more sophisticated tools of analytic topology and algebraic topology. Examples. Before starting the theorem let us look at a few examples of surfaces. In any branch of mathematics it is always a good thing to start with examples, because they are the source of our intuition. All the following pictures are of surfaces in 3-dimensions. In example 1 by the word “sphere” we mean just the surface of the sphere, and not the inside. In fact in all the examples we mean just the surface and not the solid inside. 1. Sphere. 2. Torus (or inner tube). 3. Knotted torus. 4. Sphere with knotted torus bored through it. * Zeeman wrote this article in the mid-twentieth century. 1 An Introduction to Topology 5. -

The Sphere Project
;OL :WOLYL 7YVQLJ[ +XPDQLWDULDQ&KDUWHUDQG0LQLPXP 6WDQGDUGVLQ+XPDQLWDULDQ5HVSRQVH ;OL:WOLYL7YVQLJ[ 7KHULJKWWROLIHZLWKGLJQLW\ ;OL:WOLYL7YVQLJ[PZHUPUP[PH[P]L[VKL[LYTPULHUK WYVTV[LZ[HUKHYKZI`^OPJO[OLNSVIHSJVTT\UP[` /\THUP[HYPHU*OHY[LY YLZWVUKZ[V[OLWSPNO[VMWLVWSLHMMLJ[LKI`KPZHZ[LYZ /\THUP[HYPHU >P[O[OPZ/HUKIVVR:WOLYLPZ^VYRPUNMVYH^VYSKPU^OPJO [OLYPNO[VMHSSWLVWSLHMMLJ[LKI`KPZHZ[LYZ[VYLLZ[HISPZO[OLPY *OHY[LYHUK SP]LZHUKSP]LSPOVVKZPZYLJVNUPZLKHUKHJ[LK\WVUPU^H`Z[OH[ YLZWLJ[[OLPY]VPJLHUKWYVTV[L[OLPYKPNUP[`HUKZLJ\YP[` 4PUPT\T:[HUKHYKZ This Handbook contains: PU/\THUP[HYPHU (/\THUP[HYPHU*OHY[LY!SLNHSHUKTVYHSWYPUJPWSLZ^OPJO HUK YLÅLJ[[OLYPNO[ZVMKPZHZ[LYHMMLJ[LKWVW\SH[PVUZ 4PUPT\T:[HUKHYKZPU/\THUP[HYPHU9LZWVUZL 9LZWVUZL 7YV[LJ[PVU7YPUJPWSLZ *VYL:[HUKHYKZHUKTPUPT\TZ[HUKHYKZPUMV\YRL`SPMLZH]PUN O\THUP[HYPHUZLJ[VYZ!>H[LYZ\WWS`ZHUP[H[PVUHUKO`NPLUL WYVTV[PVU"-VVKZLJ\YP[`HUKU\[YP[PVU":OLS[LYZL[[SLTLU[HUK UVUMVVKP[LTZ"/LHS[OHJ[PVU;OL`KLZJYPILwhat needs to be achieved in a humanitarian response in order for disaster- affected populations to survive and recover in stable conditions and with dignity. ;OL:WOLYL/HUKIVVRLUQV`ZIYVHKV^ULYZOPWI`HNLUJPLZHUK PUKP]PK\HSZVMMLYPUN[OLO\THUP[HYPHUZLJ[VYH common language for working together towards quality and accountability in disaster and conflict situations ;OL:WOLYL/HUKIVVROHZHU\TILYVMºJVTWHUPVU Z[HUKHYKZ»L_[LUKPUNP[ZZJVWLPUYLZWVUZL[VULLKZ[OH[ OH]LLTLYNLK^P[OPU[OLO\THUP[HYPHUZLJ[VY ;OL:WOLYL7YVQLJ[^HZPUP[PH[LKPU I`HU\TILY VMO\THUP[HYPHU5.6ZHUK[OL9LK*YVZZHUK 9LK*YLZJLU[4V]LTLU[ ,+0;065 7KHB6SKHUHB3URMHFWBFRYHUBHQBLQGG The Sphere Project Humanitarian Charter and Minimum Standards in Humanitarian Response Published by: The Sphere Project Copyright@The Sphere Project 2011 Email: [email protected] Website : www.sphereproject.org The Sphere Project was initiated in 1997 by a group of NGOs and the Red Cross and Red Crescent Movement to develop a set of universal minimum standards in core areas of humanitarian response: the Sphere Handbook. -

Quick Reference Guide - Ansi Z80.1-2015
QUICK REFERENCE GUIDE - ANSI Z80.1-2015 1. Tolerance on Distance Refractive Power (Single Vision & Multifocal Lenses) Cylinder Cylinder Sphere Meridian Power Tolerance on Sphere Cylinder Meridian Power ≥ 0.00 D > - 2.00 D (minus cylinder convention) > -4.50 D (minus cylinder convention) ≤ -2.00 D ≤ -4.50 D From - 6.50 D to + 6.50 D ± 0.13 D ± 0.13 D ± 0.15 D ± 4% Stronger than ± 6.50 D ± 2% ± 0.13 D ± 0.15 D ± 4% 2. Tolerance on Distance Refractive Power (Progressive Addition Lenses) Cylinder Cylinder Sphere Meridian Power Tolerance on Sphere Cylinder Meridian Power ≥ 0.00 D > - 2.00 D (minus cylinder convention) > -3.50 D (minus cylinder convention) ≤ -2.00 D ≤ -3.50 D From -8.00 D to +8.00 D ± 0.16 D ± 0.16 D ± 0.18 D ± 5% Stronger than ±8.00 D ± 2% ± 0.16 D ± 0.18 D ± 5% 3. Tolerance on the direction of cylinder axis Nominal value of the ≥ 0.12 D > 0.25 D > 0.50 D > 0.75 D < 0.12 D > 1.50 D cylinder power (D) ≤ 0.25 D ≤ 0.50 D ≤ 0.75 D ≤ 1.50 D Tolerance of the axis Not Defined ° ° ° ° ° (degrees) ± 14 ± 7 ± 5 ± 3 ± 2 4. Tolerance on addition power for multifocal and progressive addition lenses Nominal value of addition power (D) ≤ 4.00 D > 4.00 D Nominal value of the tolerance on the addition power (D) ± 0.12 D ± 0.18 D 5. Tolerance on Prism Reference Point Location and Prismatic Power • The prismatic power measured at the prism reference point shall not exceed 0.33Δ or the prism reference point shall not be more than 1.0 mm away from its specified position in any direction. -

1 University of California, Berkeley Physics 7A, Section 1, Spring 2009
1 University of California, Berkeley Physics 7A, Section 1, Spring 2009 (Yury Kolomensky) SOLUTIONS TO THE SECOND MIDTERM Maximum score: 100 points 1. (10 points) Blitz (a) hoop, disk, sphere This is a set of simple questions to warm you up. The (b) disk, hoop, sphere problem consists of five questions, 2 points each. (c) sphere, hoop, disk 1. Circle correct answer. Imagine a basketball bouncing on a court. After a dozen or so (d) sphere, disk, hoop bounces, the ball stops. From this, you can con- (e) hoop, sphere, disk clude that Answer: (d). The object with highest moment of (a) Energy is not conserved. inertia has the largest kinetic energy at the bot- (b) Mechanical energy is conserved, but only tom, and would reach highest elevation. The ob- for a single bounce. ject with the smallest moment of inertia (sphere) (c) Total energy in conserved, but mechanical will therefore reach lowest altitude, and the ob- energy is transformed into other types of ject with the largest moment of inertia (hoop) energy (e.g. heat). will be highest. (d) Potential energy is transformed into kinetic 4. A particle attached to the end of a massless rod energy of length R is rotating counter-clockwise in the (e) None of the above. horizontal plane with a constant angular velocity ω as shown in the picture below. Answer: (c) 2. Circle correct answer. In an elastic collision ω (a) momentum is not conserved but kinetic en- ergy is conserved; (b) momentum is conserved but kinetic energy R is not conserved; (c) both momentum and kinetic energy are conserved; (d) neither kinetic energy nor momentum is Which direction does the vector ~ω point ? conserved; (e) none of the above. -

4 Homotopy Theory Primer
4 Homotopy theory primer Given that some topological invariant is different for topological spaces X and Y one can definitely say that the spaces are not homeomorphic. The more invariants one has at his/her disposal the more detailed testing of equivalence of X and Y one can perform. The homotopy theory constructs infinitely many topological invariants to characterize a given topological space. The main idea is the following. Instead of directly comparing struc- tures of X and Y one takes a “test manifold” M and considers the spacings of its mappings into X and Y , i.e., spaces C(M, X) and C(M, Y ). Studying homotopy classes of those mappings (see below) one can effectively compare the spaces of mappings and consequently topological spaces X and Y . It is very convenient to take as “test manifold” M spheres Sn. It turns out that in this case one can endow the spaces of mappings (more precisely of homotopy classes of those mappings) with group structure. The obtained groups are called homotopy groups of corresponding topological spaces and present us with very useful topological invariants characterizing those spaces. In physics homotopy groups are mostly used not to classify topological spaces but spaces of mappings themselves (i.e., spaces of field configura- tions). 4.1 Homotopy Definition Let I = [0, 1] is a unit closed interval of R and f : X Y , → g : X Y are two continuous maps of topological space X to topological → space Y . We say that these maps are homotopic and denote f g if there ∼ exists a continuous map F : X I Y such that F (x, 0) = f(x) and × → F (x, 1) = g(x). -
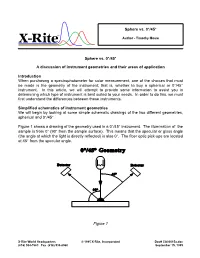
Sphere Vs. 0°/45° a Discussion of Instrument Geometries And
Sphere vs. 0°/45° ® Author - Timothy Mouw Sphere vs. 0°/45° A discussion of instrument geometries and their areas of application Introduction When purchasing a spectrophotometer for color measurement, one of the choices that must be made is the geometry of the instrument; that is, whether to buy a spherical or 0°/45° instrument. In this article, we will attempt to provide some information to assist you in determining which type of instrument is best suited to your needs. In order to do this, we must first understand the differences between these instruments. Simplified schematics of instrument geometries We will begin by looking at some simple schematic drawings of the two different geometries, spherical and 0°/45°. Figure 1 shows a drawing of the geometry used in a 0°/45° instrument. The illumination of the sample is from 0° (90° from the sample surface). This means that the specular or gloss angle (the angle at which the light is directly reflected) is also 0°. The fiber optic pick-ups are located at 45° from the specular angle. Figure 1 X-Rite World Headquarters © 1995 X-Rite, Incorporated Doc# CA00015a.doc (616) 534-7663 Fax (616) 534-8960 September 15, 1995 Figure 2 shows a drawing of the geometry used in an 8° diffuse sphere instrument. The sphere wall is lined with a highly reflective white substance and the light source is located on the rear of the sphere wall. A baffle prevents the light source from directly illuminating the sample, thus providing diffuse illumination. The sample is viewed at 8° from perpendicular which means that the specular or gloss angle is also 8° from perpendicular. -

Fixed Point Free Involutions on Cohomology Projective Spaces
Indian J. pure appl. Math., 39(3): 285-291, June 2008 °c Printed in India. FIXED POINT FREE INVOLUTIONS ON COHOMOLOGY PROJECTIVE SPACES HEMANT KUMAR SINGH1 AND TEJ BAHADUR SINGH Department of Mathematics, University of Delhi, Delhi 110 007, India e-mail: tej b [email protected] (Received 22 September 2006; after final revision 24 January 2008; accepted 14 February 2008) Let X be a finitistic space with the mod 2 cohomology ring isomorphic to that of CP n, n odd. In this paper, we determine the mod 2 cohomology ring of the orbit space of a fixed point free involution on X. This gives a classification of cohomology type of spaces with the fundamental group Z2 and the covering space a complex projective space. Moreover, we show that there exists no equivariant map Sm ! X for m > 2 relative to the antipodal action on Sm. An analogous result is obtained for a fixed point free involution on a mod 2 cohomology real projective space. Key Words: Projective space; free action; cohomology algebra; spectral sequence 1. INTRODUCTION Suppose that a topological group G acts (continuously) on a topological space X. Associated with the transformation group (G; X) are two new spaces: The fixed point set XG = fx²Xjgx = x; for all g²Gg and the orbit space X=G whose elements are the orbits G(x) = fgxjg²Gg and the topology is induced by the natural projection ¼ : X ! X=G; x ! G(x). If X and Y are G-spaces, then an equivariant map from X to Y is a continuous map Á : X ! Y such that gÁ(x) = Ág(x) for all g²G; x 2 X. -

The Geometry of the Disk Complex
JOURNAL OF THE AMERICAN MATHEMATICAL SOCIETY Volume 26, Number 1, January 2013, Pages 1–62 S 0894-0347(2012)00742-5 Article electronically published on August 22, 2012 THE GEOMETRY OF THE DISK COMPLEX HOWARD MASUR AND SAUL SCHLEIMER Contents 1. Introduction 1 2. Background on complexes 3 3. Background on coarse geometry 6 4. Natural maps 8 5. Holes in general and the lower bound on distance 11 6. Holes for the non-orientable surface 13 7. Holes for the arc complex 14 8. Background on three-manifolds 14 9. Holes for the disk complex 18 10. Holes for the disk complex – annuli 19 11. Holes for the disk complex – compressible 22 12. Holes for the disk complex – incompressible 25 13. Axioms for combinatorial complexes 30 14. Partition and the upper bound on distance 32 15. Background on Teichm¨uller space 41 16. Paths for the non-orientable surface 44 17. Paths for the arc complex 47 18. Background on train tracks 48 19. Paths for the disk complex 50 20. Hyperbolicity 53 21. Coarsely computing Hempel distance 57 Acknowledgments 60 References 60 1. Introduction Suppose M is a compact, connected, orientable, irreducible three-manifold. Sup- pose S is a compact, connected subsurface of ∂M so that no component of ∂S bounds a disk in M. In this paper we study the intrinsic geometry of the disk complex D(M,S). The disk complex has a natural simplicial inclusion into the curve complex C(S). Surprisingly, this inclusion is generally not a quasi-isometric embedding; there are disks which are close in the curve complex yet far apart in the disk complex.