Introduction to Computer Graphics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Walt Disney the World of Animation
Ziptales Advanced Library Worksheet 2 Walt Disney The World of Animation Walt always loved drawing...he made a ‘flip-book’ of walking stick figures drawings to amuse his sick sister. Even as a young boy, Walt Disney knew the entertaining power of animation. The ‘flip book’ he made was a rudimentary animation device invented during the 19th century. It produced the appearance of movement by simply ‘flipping’ sequential hand drawn illustrations in a book. This idea was later developed into what we now know as cartoons: sequential drawings, known as ‘cells’, photographed and displayed rapidly. Later, animators utilised techinques such as ‘claymation’ (clay or plasticine figures being manipulated and photographed) and digital animations (using computer software) to create their masterpieces. Task 1: Create an animation using one of the above techniques; flip-book, cartoon, claymation or digital animation. Step 1: Select the technique you are going to use ensuring you have access to the materials/ equipment required. Step 2: Write a short story to be told in the animation using the common elements of a narrative: orientation, complication, series of events, resolution. Step 3: Design a ‘story board’ displaying a rough idea of what will happen in each ‘cell’ of the animation. Step 4: Create the animation and display it to an appropriate audience. Extension Activities: • Research your favourite animated cartoon. (NOTE: It must be suitable for children – not ‘adult’ cartoons such as South Park and Family Guy). Who created the cartoon? When was it created? Where was it created? Where has it been shown? • Identify four different animation techniques used for feature films (for example Rotoscoping, Live Action animation). -

Animation: Types
Animation: Animation is a dynamic medium in which images or objects are manipulated to appear as moving images. In traditional animation, images are drawn or painted by hand on transparent celluloid sheets to be photographed and exhibited on film. Today most animations are made with computer generated (CGI). Commonly the effect of animation is achieved by a rapid succession of sequential images that minimally differ from each other. Apart from short films, feature films, animated gifs and other media dedicated to the display moving images, animation is also heavily used for video games, motion graphics and special effects. The history of animation started long before the development of cinematography. Humans have probably attempted to depict motion as far back as the Paleolithic period. Shadow play and the magic lantern offered popular shows with moving images as the result of manipulation by hand and/or some minor mechanics Computer animation has become popular since toy story (1995), the first feature-length animated film completely made using this technique. Types: Traditional animation (also called cel animation or hand-drawn animation) was the process used for most animated films of the 20th century. The individual frames of a traditionally animated film are photographs of drawings, first drawn on paper. To create the illusion of movement, each drawing differs slightly from the one before it. The animators' drawings are traced or photocopied onto transparent acetate sheets called cels which are filled in with paints in assigned colors or tones on the side opposite the line drawings. The completed character cels are photographed one-by-one against a painted background by rostrum camera onto motion picture film. -

The Significance of Anime As a Novel Animation Form, Referencing Selected Works by Hayao Miyazaki, Satoshi Kon and Mamoru Oshii
The significance of anime as a novel animation form, referencing selected works by Hayao Miyazaki, Satoshi Kon and Mamoru Oshii Ywain Tomos submitted for the degree of Doctor of Philosophy Aberystwyth University Department of Theatre, Film and Television Studies, September 2013 DECLARATION This work has not previously been accepted in substance for any degree and is not being concurrently submitted in candidature for any degree. Signed………………………………………………………(candidate) Date …………………………………………………. STATEMENT 1 This dissertation is the result of my own independent work/investigation, except where otherwise stated. Other sources are acknowledged explicit references. A bibliography is appended. Signed………………………………………………………(candidate) Date …………………………………………………. STATEMENT 2 I hereby give consent for my dissertation, if accepted, to be available for photocopying and for inter-library loan, and for the title and summary to be made available to outside organisations. Signed………………………………………………………(candidate) Date …………………………………………………. 2 Acknowledgements I would to take this opportunity to sincerely thank my supervisors, Elin Haf Gruffydd Jones and Dr Dafydd Sills-Jones for all their help and support during this research study. Thanks are also due to my colleagues in the Department of Theatre, Film and Television Studies, Aberystwyth University for their friendship during my time at Aberystwyth. I would also like to thank Prof Josephine Berndt and Dr Sheuo Gan, Kyoto Seiko University, Kyoto for their valuable insights during my visit in 2011. In addition, I would like to express my thanks to the Coleg Cenedlaethol for the scholarship and the opportunity to develop research skills in the Welsh language. Finally I would like to thank my wife Tomoko for her support, patience and tolerance over the last four years – diolch o’r galon Tomoko, ありがとう 智子. -

The Formation of Temporary Communities in Anime Fandom: a Story of Bottom-Up Globalization ______
THE FORMATION OF TEMPORARY COMMUNITIES IN ANIME FANDOM: A STORY OF BOTTOM-UP GLOBALIZATION ____________________________________ A Thesis Presented to the Faculty of California State University, Fullerton ____________________________________ In Partial Fulfillment of the Requirements for the Degree Master of Arts in Geography ____________________________________ By Cynthia R. Davis Thesis Committee Approval: Mark Drayse, Department of Geography & the Environment, Chair Jonathan Taylor, Department of Geography & the Environment Zia Salim, Department of Geography & the Environment Summer, 2017 ABSTRACT Japanese animation, commonly referred to as anime, has earned a strong foothold in the American entertainment industry over the last few decades. Anime is known by many to be a more mature option for animation fans since Western animation has typically been sanitized to be “kid-friendly.” This thesis explores how this came to be, by exploring the following questions: (1) What were the differences in the development and perception of the animation industries in Japan and the United States? (2) Why/how did people in the United States take such interest in anime? (3) What is the role of anime conventions within the anime fandom community, both historically and in the present? These questions were answered with a mix of historical research, mapping, and interviews that were conducted in 2015 at Anime Expo, North America’s largest anime convention. This thesis concludes that anime would not have succeeded as it has in the United States without the heavy involvement of domestic animation fans. Fans created networks, clubs, and conventions that allowed for the exchange of information on anime, before Japanese companies started to officially release anime titles for distribution in the United States. -

Teachers Guide
Teachers Guide Exhibit partially funded by: and 2006 Cartoon Network. All rights reserved. TEACHERS GUIDE TABLE OF CONTENTS PAGE HOW TO USE THIS GUIDE 3 EXHIBIT OVERVIEW 4 CORRELATION TO EDUCATIONAL STANDARDS 9 EDUCATIONAL STANDARDS CHARTS 11 EXHIBIT EDUCATIONAL OBJECTIVES 13 BACKGROUND INFORMATION FOR TEACHERS 15 FREQUENTLY ASKED QUESTIONS 23 CLASSROOM ACTIVITIES • BUILD YOUR OWN ZOETROPE 26 • PLAN OF ACTION 33 • SEEING SPOTS 36 • FOOLING THE BRAIN 43 ACTIVE LEARNING LOG • WITH ANSWERS 51 • WITHOUT ANSWERS 55 GLOSSARY 58 BIBLIOGRAPHY 59 This guide was developed at OMSI in conjunction with Animation, an OMSI exhibit. 2006 Oregon Museum of Science and Industry Animation was developed by the Oregon Museum of Science and Industry in collaboration with Cartoon Network and partially funded by The Paul G. Allen Family Foundation. and 2006 Cartoon Network. All rights reserved. Animation Teachers Guide 2 © OMSI 2006 HOW TO USE THIS TEACHER’S GUIDE The Teacher’s Guide to Animation has been written for teachers bringing students to see the Animation exhibit. These materials have been developed as a resource for the educator to use in the classroom before and after the museum visit, and to enhance the visit itself. There is background information, several classroom activities, and the Active Learning Log – an open-ended worksheet students can fill out while exploring the exhibit. Animation web site: The exhibit website, www.omsi.edu/visit/featured/animationsite/index.cfm, features the Animation Teacher’s Guide, online activities, and additional resources. Animation Teachers Guide 3 © OMSI 2006 EXHIBIT OVERVIEW Animation is a 6,000 square-foot, highly interactive traveling exhibition that brings together art, math, science and technology by exploring the exciting world of animation. -

LEVY-MASTERSREPORT-2017.Pdf (7.541Mb)
Copyright by Dylan Olim Levy 2017 The Report Committee for Dylan Olim Levy Certifies that this is the approved version of the following report: Animating History and Memory: the Productions and Aesthetics of Waltz with Bashir and Tower APPROVED BY SUPERVISING COMMITTEE: Supervisor: Lalitha Gopalan Charles Ramìrez Berg Animating History and Memory: the Productions and Aesthetics of Waltz with Bashir and Tower by Dylan Olim Levy, B.A. Report Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Master of Arts The University of Texas at Austin May 2017 Abstract Animating History and Memory: the Productions and Aesthetics of Waltz with Bashir and Tower Dylan Olim Levy, M.A. The University of Texas at Austin, 2017 Supervisor: Lalitha Gopalan Films like Waltz with Bashir (2008) and Tower (2016) are unique in that they not only fit within accepted frameworks of documentary filmmaking, but they also use animation as their primary method of storytelling. Anabelle Honess Roe thoroughly explores animated documentaries in her book Animated Documentary, arguing that animation is used in these kinds of films to either “substitute” for traditional means to represent the real world (24), such as live action footage, or to “evoke” the psychology, emotional states, and other subjective experiences of an individual (25). Ultimately, Roe argues that animation is a suitable “representational strategy for documentary” filmmaking because of its “visual dialectic of absence and excess” (39). This report applies Roe’s arguments to the analysis of the aesthetics and roles of animation in Waltz with Bashir and Tower. -

Think Film! on Current Practices and Challenges in Film Culture: a Documentation of a Student Symposium 2020
Repositorium für die Medienwissenschaft Adriane Meusch, Bianka-Isabell Scharmann u.a. (Hg.) Think Film! On Current Practices and Challenges in Film Culture: A Documentation of a Student Symposium 2020 https://doi.org/10.25969/mediarep/13589 Veröffentlichungsversion / published version Konferenzbeitrag / conference object Empfohlene Zitierung / Suggested Citation: Meusch, Adriane; Scharmann, Bianka-Isabell (Hg.): Think Film! On Current Practices and Challenges in Film Culture: A Documentation of a Student Symposium. Frankfurt am Main: Zenodo 2020. DOI: https://doi.org/10.25969/mediarep/13589. Erstmalig hier erschienen / Initial publication here: https://doi.org/10.5281/zenodo.3662799 Nutzungsbedingungen: Terms of use: Dieser Text wird unter einer Creative Commons - This document is made available under a creative commons - Namensnennung 4.0/ Lizenz zur Verfügung gestellt. Nähere Attribution 4.0/ License. For more information see: Auskünfte zu dieser Lizenz finden Sie hier: http://creativecommons.org/licenses/by/4.0/ http://creativecommons.org/licenses/by/4.0/ THINK THINK FILM! Edited by Adriane MeuschandBianka- Adriane Edited by Isabell Scharmann On Current Practices and Challenges in Film Culture: A Documentation of a Student Symposium Think Film! On Current Practices and Challenges in Film Culture: A Documentation of a Student Symposium Edited by Adriane Meusch & Bianka- Isabell Scharmann Frankfurt am Main, 2020 Editors Adriane Meusch and Bianka-Isabell Scharmann, in collaboration with Michelle Rafaela Kamolz https://thinkfilmsymposium.wordpress.com Copy Editor Carly Crane Graphic Design Muriel Serf (mmm.do) Bibliographic information of the German Library The German Library catalogues this publication in the German National Bibliography; detailed bibliographic information can be found on the Internet website: http://dnb.d-nb.de. -

Cartooning America: the Fleischer Brothers Story
NEH Application Cover Sheet (TR-261087) Media Projects Production PROJECT DIRECTOR Ms. Kathryn Pierce Dietz E-mail: [email protected] Executive Producer and Project Director Phone: 781-956-2212 338 Rosemary Street Fax: Needham, MA 02494-3257 USA Field of expertise: Philosophy, General INSTITUTION Filmmakers Collaborative, Inc. Melrose, MA 02176-3933 APPLICATION INFORMATION Title: Cartooning America: The Fleischer Brothers Story Grant period: From 2018-09-03 to 2019-04-19 Project field(s): U.S. History; Film History and Criticism; Media Studies Description of project: Cartooning America: The Fleischer Brothers Story is a 60-minute film about a family of artists and inventors who revolutionized animation and created some of the funniest and most irreverent cartoon characters of all time. They began working in the early 1900s, at the same time as Walt Disney, but while Disney went on to become a household name, the Fleischers are barely remembered. Our film will change this, introducing a wide national audience to a family of brothers – Max, Dave, Lou, Joe, and Charlie – who created Fleischer Studios and a roster of animated characters who reflected the rough and tumble sensibilities of their own Jewish immigrant neighborhood in Brooklyn, New York. “The Fleischer story involves the glory of American Jazz culture, union brawls on Broadway, gangsters, sex, and southern segregation,” says advisor Tom Sito. Advisor Jerry Beck adds, “It is a story of rags to riches – and then back to rags – leaving a legacy of iconic cinema and evergreen entertainment.” BUDGET Outright Request 600,000.00 Cost Sharing 90,000.00 Matching Request 0.00 Total Budget 690,000.00 Total NEH 600,000.00 GRANT ADMINISTRATOR Ms. -

Vol. 3 Issue 4 July 1998
Vol.Vol. 33 IssueIssue 44 July 1998 Adult Animation Late Nite With and Comics Space Ghost Anime Porn NYC: Underground Girl Comix Yellow Submarine Turns 30 Frank & Ollie on Pinocchio Reviews: Mulan, Bob & Margaret, Annecy, E3 TABLE OF CONTENTS JULY 1998 VOL.3 NO.4 4 Editor’s Notebook Is it all that upsetting? 5 Letters: [email protected] Dig This! SIGGRAPH is coming with a host of eye-opening films. Here’s a sneak peak. 6 ADULT ANIMATION Late Nite With Space Ghost 10 Who is behind this spandex-clad leader of late night? Heather Kenyon investigates with help from Car- toon Network’s Michael Lazzo, Senior Vice President, Programming and Production. The Beatles’Yellow Submarine Turns 30: John Coates and Norman Kauffman Look Back 15 On the 30th anniversary of The Beatles’ Yellow Submarine, Karl Cohen speaks with the two key TVC pro- duction figures behind the film. The Creators of The Beatles’Yellow Submarine.Where Are They Now? 21 Yellow Submarine was the start of a new era of animation. Robert R. Hieronimus, Ph.D. tells us where some of the creative staff went after they left Pepperland. The Mainstream Business of Adult Animation 25 Sean Maclennan Murch explains why animated shows targeted toward adults are becoming a more popular approach for some networks. The Anime “Porn” Market 1998 The misunderstood world of anime “porn” in the U.S. market is explored by anime expert Fred Patten. Animation Land:Adults Unwelcome 28 Cedric Littardi relates his experiences as he prepares to stand trial in France for his involvement with Ani- meLand, a magazine focused on animation for adults. -
How to Rotoscope
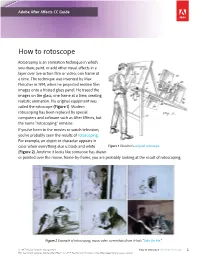
Adobe After Affects CC Guide How to rotoscope Rotoscoping is an animation technique in which you draw, paint, or add other visual effects in a layer over live-action film or video, one frame at a time. The technique was invented by Max Fleischer in 1914, when he projected motion film images onto a frosted glass panel. He traced the images on the glass, one frame at a time, creating realistic animation. His original equipment was called the rotoscope (Figure 1). Modern rotoscoping has been replaced by special computers and software such as After Effects, but the name “rotoscoping” remains. If you’ve been to the movies or watch television, you’ve probably seen the results of rotoscoping. For example, an object or character appears in color when everything else is black and white Figure 1 Fleischer’s original rotoscope. (Figure 2). Anytime it looks like someone has drawn or painted over the movie, frame-by-frame, you are probably looking at the result of rotoscoping. Figure 2 Example of rotoscoping, music video screenshots from A-ha’s “Take On Me.” © 2017 Adobe Systems Incorporated. How to rotoscope After Effects Guide 1 This document requires Adobe After Effects CC 2017. Technical instructions may differ depending on your version. Rotoscoping in After Effects These days, rotoscoping refers to the technique of creating a matte for a moving element on one layer so that it can be composited over another background layer (Figure 3). As you can imagine, creating this matte in every frame of a movie is a laborious process, but necessary if you don’t have a good key or haven’t shot footage in which the foreground is easily separated from the background. -

Rotoscoping Software
JOB ROLE – ROTO ARTIST Sector – Media and Entertainment Sector (Qualification Pack Code: MES/Q3504) ( Class-XI ) PSS Central Institute of Vocational Education Shyamla Hills, Bhopal – 462 013 , Madhya Pradesh, India _________________________________________________________ www.psscive.ac.in 1 UNIT 2: CREATIVE AND TECHNICAL REQUIREMENT Chapter 7: Rotoscoping Software 2 Content Title Slide No. Chapter Objectives 04 Introduction 05 Rotoscoping Software 06-07 Adobe After Effects 08-13 System requirement for Adobe after Effects 14 Advantage of Adobe After Effects in Rotoscoping 15 Silhouette 2020 16- 19 System requirement of Silhouette 2020 20 Nuke 21-24 Minimum System Requirement of Nuke 25 Summary 26 3 Chapter Objectives The students will be able to: ❑ Define Rotoscoping Software, ❑ Explain Adobe After Effects software, its key features, ❑ Prepare System requirement for Adobe after Effects CC2019, ❑ Describe advantage of Adobe After Effects in Rotoscoping, ❑ Explain SilhouetteFX software, its Key features with rotoscoping feature and advantages, ❑ Prepare System requirement of Silhouette 2020, ❑ Explain Nuke, its Key feature and Advantage, ❑ Prepare Minimum System Requirement of Nuke. 4 Introduction Shifting from traditional to digital rotoscopy started in 1990s, Bob sabiston, a computer scientist made a program named ‘Rotoshop’. The technique of rotoshop is adopted from sketching, where artist traced first image and then copied it for next movement. It saves the time of sketching the second image. Another program ‘Matador’ was used for rotoscopy on hundred of feature film between 1990s to early 2000 including Jurassic park, forest gump and hulk. Matador was a paint application. Its main characteristics were paint, mask creation, animation, image stabilization and tracking. In comparison to traditional roto artist, a digital roto artist can do the eight time more work in 1/4th of time. -

Video Puppetry: a Performative Interface for Cutout Animation
Video Puppetry: A Performative Interface for Cutout Animation Connelly Barnes1 David E. Jacobs2 Jason Sanders2 Dan B Goldman3 Szymon Rusinkiewicz1 Adam Finkelstein1 Maneesh Agrawala2 1Princeton University 2University of California, Berkeley 3Adobe Systems Figure 1: A puppeteer (left) manipulates cutout paper puppets tracked in real time (above) to control an animation (below). Abstract 1 Introduction Creating animated content is difficult. While traditional hand- We present a video-based interface that allows users of all skill drawn or stop-motion animation allows broad expressive freedom, levels to quickly create cutout-style animations by performing the creating such animation requires expertise in composition and tim- character motions. The puppeteer first creates a cast of physical ing, as the animator must laboriously craft a sequence of frames puppets using paper, markers and scissors. He then physically to convey motion. Computer-based animation tools such as Flash, moves these puppets to tell a story. Using an inexpensive overhead Toon Boom and Maya provide sophisticated interfaces that allow camera our system tracks the motions of the puppets and renders precise and flexible control over the motion. Yet, the cost of pro- them on a new background while removing the puppeteer’s hands. viding such control is a complicated interface that is difficult to Our system runs in real-time (at 30 fps) so that the puppeteer and learn. Thus, traditional animation and computer-based animation the audience can immediately see the animation that is created. Our tools are accessible only to experts. system also supports a variety of constraints and effects including Puppetry, in contrast, is a form of dynamic storytelling that per- articulated characters, multi-track animation, scene changes, cam- 1 formers of all ages and skill levels can readily engage in.