KARMA User Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Karma, the Enlightened One Move/Attack Voice Over Dialogue Aud 1 My Spirit Is an Unquenchable Fire
CHAMPION NAME Karma, the Enlightened One Move/Attack Voice Over Dialogue Aud 1 My spirit is an unquenchable fire. Aud 2 Never again. Aud 3 An ideal is nothing until you fight for it. Aud 4 I have seen two paths - and made another between them. Aud 5 Tradition in stride with revolution. Aud 6 By force of will. Aud 7 Know your enemy's heart--and if you must, stop it. Aud 8 Ionia must find herself again. Aud 9 Challenge what you know. Aud 10 Learn from the past, but never fear change. Aud 11 None will question our resolve. Aud 12 To conquer oneself is to conquer all. Aud 13 Focus your will. Karma is a zen monk pushed to her limit. She is spiritual, leaderlike and focused with a fierce and aggressive edge, willing to do anything to protect what is Voice Description: important to her. Though she prefers peace, Karma will make difficult and violent choices when necessary. Video Reference: Dejah Thoris (Princess of Mars) - Reference around 1:00 in video: Storm (X-Men) - Confident, dignified, and in control of incredible power. Uhura (Star Trek 2009) - Fierce and leaderlike. A once-pacifist spiritual leader of Ionia who is driven to unleash her power when her peaceful home is invaded. She has now resolved to do whatever is necessary to protect her people and lead them back to the strength they once knew. Karma Character Bio: struggles to unify the two ideals that have divided her people since the invasion, the traditional, pacifist elders and the militant youth crying for revolution and reform. -

Graphic No Vels & Comics
GRAPHIC NOVELS & COMICS SPRING 2020 TITLE Description FRONT COVER X-Men, Vol. 1 The X-Men find themselves in a whole new world of possibility…and things have never been better! Mastermind Jonathan Hickman and superstar artist Leinil Francis Yu reveal the saga of Cyclops and his hand-picked squad of mutant powerhouses. Collects #1-6. 9781302919818 | $17.99 PB Marvel Fallen Angels, Vol. 1 Psylocke finds herself in the new world of Mutantkind, unsure of her place in it. But when a face from her past returns only to be killed, she seeks vengeance. Collects Fallen Angels (2019) #1-6. 9781302919900 | $17.99 PB Marvel Wolverine: The Daughter of Wolverine Wolverine stars in a story that stretches across the decades beginning in the 1940s. Who is the young woman he’s fated to meet over and over again? Collects material from Marvel Comics Presents (2019) #1-9. 9781302918361 | $15.99 PB Marvel 4 Graphic Novels & Comics X-Force, Vol. 1 X-Force is the CIA of the mutant world—half intelligence branch, half special ops. In a perfect world, there would be no need for an X-Force. We’re not there…yet. Collects #1-6. 9781302919887 | $17.99 PB Marvel New Mutants, Vol. 1 The classic New Mutants (Sunspot, Wolfsbane, Mirage, Karma, Magik, and Cypher) join a few new friends (Chamber, Mondo) to seek out their missing member and go on a mission alongside the Starjammers! Collects #1-6. 9781302919924 | $17.99 PB Marvel Excalibur, Vol. 1 It’s a new era for mutantkind as a new Captain Britain holds the amulet, fighting for her Kingdom of Avalon with her Excalibur at her side—Rogue, Gambit, Rictor, Jubilee…and Apocalypse. -

Sociality in Digital Space
13 Queer Cyborgs and New Mutants: Race, Sexuality, and Prosthetic Sociality in Digital Space MIMI NGUYEN Long ago I learned my lessons from the comic books. I learned that mutant bodies were powerfi.rl but vulnerable bodies; vulnerable because such powers made one atarget for social control, prejudice, enmiry and evildoers seeking recruits, vulnerable because these energies threaten to overcome and eclipse the fragile vessel of the body. In 1980 the Marvel universe introduced the superhero team called the New Mutants, a multicultural crew of misfit teens led by an ascetically thin Vietnamese refugee X'an Coy Manh, the daughter of a South Vietnamese colonel with an evil twin (and also mutant) brother and a criminal ganglord uncle. Recruited by Professor Xavier for his New England School for Gifted Youngsters and called Karma in her X incarnation, she was a grim and conscientious figure, able to seize control of other people's minds and bodies- a fortuitous alteration of her genetic code in the aftermath of her mother's exposure to mutagenic chemical defoliants used during the war. The luckless subjects of her power would become extensions of her will and her senses- prosthetic mannequins speaking in her voice, attacking their fellows with their physical strength or armor where she had little of both. Though she could possess several subjects simultanebusly, her control would be fragmented and sometimes awkward, distributed among the hosts. In many ways, it was a curious power that left her vulnerable to physical threat and harm. Her own flesh was not protected by any aspect of her power, and she was forced to find some discrete corner or shield herself with the bodies of her more physicallypowerful team members. -
Roger Ebert This Message Came to Me from a Reader Named Peter Sv Ensland
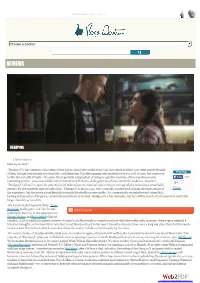
In Memoriam 1942 – 2013 | ROGEREBERT..COM Choose a Section REVIEWS DEADPOOL | Brian Tallerico February 12, 2016 | “Deadpool” is the cinematic equivalent of that kid in school who would always say how much he didn’t care what people thought of him, but just loud enough so everybody could hear him. It is the teenager who pretends to be too cool to care, but wants you Print Page to like him so badly it hurts. Of course, this is partially a byproduct of being a cog in the machine of the superhero movie Like 197 marketing system—you unavoidably have to hit a few of the beats of the genre in order to satisfy the audience. However, 6 “Deadpool” fails to live up to the potential of its beloved source material, subverting its own agenda by becoming a remarkably generic, by-the-numbers man-in-tights flick. “Deadpool” is about a guy who constantly pushes back against the expectations of Tweet the superhero, but the movie about him fails to match his rebellious personality. It’s a remarkably straightforward origin flick, lacking in true satire of its genre, carried almost entirely by its lead. Deadpool is a fun character, but he’s still in search of a fun movie to match his larger-than-life personality. After years in development limbo, Ryan Reynolds finally gets a role that he was WATCH NOW undeniably built for in this adaptation of Fabian Nicieza and Rob Liefeld’s Marvel creation. A lot of pushback against reviews of comic book films tends to come from those who believe the critic unaware of the source material’s inherent strengths, so it seems fair to note that I read Deadpool back in the ‘90s. -

X-Men: Mutant Massacre Ebook Free Download
X-MEN: MUTANT MASSACRE PDF, EPUB, EBOOK Chris Claremont | 320 pages | 12 Feb 2013 | Marvel Comics | 9780785167419 | English | New York, United States X-men: Mutant Massacre PDF Book Even with the medical treatment, more and more of the Morlocks are dying. Nightcrawler and Shadowcat get severely wounded in the process. New Mutants : After they return from the fight with Magus, Karma soon leaves the team to search for her missing siblings. Jun 06, Alex9 rated it it was amazing. On Sale Date: November 07, The fourth issue is worse: Stern is abruptly kicked off because his final issue made Magneto too malevolent and the replacement authors write a heavy-handed story that doesn't feel like it matches well with the rest though it turns out, it hits most of the same major plot points as Stern's original script. While Shadowcat might be saved with the Fantastic Four's help, the Angel contemplates a much bleaker fate! Scalphunter, unwilling to let his former teammates remain zombies, killed each of them and then shot Madelyne Pryor in the heart. This aspect of the story was satirized in What The--?! Sinister only cares about his work. While I think the crossover renders the story just a little bit too cluttered to be compared to The Dark Phoenix Saga , it does represent something of a highlight in an impressive run. However, it's no less important to the FF because of a plot line questioning Reed's motives before their initial spaceflight. This crossover is more impressive for introducing a number of significant shake-ups that actually mattered. -

X-Men Archives Checklist
X-Men Archives Checklist Base Cards # Card Title [ ] 01 Title Card [ ] 02 Angel [ ] 03 Armor [ ] 04 Beast [ ] 05 Bishop [ ] 06 Blink [ ] 07 Cable [ ] 08 Caliban [ ] 09 Callisto [ ] 10 Cannonball [ ] 11 Captain Britain [ ] 12 Chamber [ ] 13 Colossus [ ] 14 Cyclops [ ] 15 Dazzler [ ] 16 Deadpool [ ] 17 Domino [ ] 18 Dust [ ] 19 Elixir [ ] 20 Emma Frost/White Queen [ ] 21 Forge [ ] 22 Gambit [ ] 23 Guardian [ ] 24 Havok [ ] 25 Hellion [ ] 26 Icarus [ ] 27 Iceman [ ] 28 Ink [ ] 29 Jean Grey [ ] 30 Jubilee [ ] 31 Karma [ ] 32 Kuan-Yin Xorn [ ] 33 Lilandra [ ] 34 Longshot [ ] 35 M [ ] 36 Magik [ ] 37 Magma [ ] 38 Marvel Girl [ ] 39 Mercury [ ] 40 Mimic [ ] 41 Mirage [ ] 42 Morph [ ] 43 Multiple Man [ ] 44 Nightcrawler [ ] 45 Northstar [ ] 46 Omega Sentinel [ ] 47 Pixie [ ] 48 Polaris [ ] 49 Prodigy [ ] 50 Professor Xavier [ ] 51 Psylocke [ ] 52 Quicksilver [ ] 53 Rockslide [ ] 54 Rogue [ ] 55 Sage [ ] 56 Shadowcat [ ] 57 Shatterstar [ ] 58 Shola Inkosi [ ] 59 Siryn [ ] 60 Starjammers [ ] 61 Storm [ ] 62 Strong Guy [ ] 63 Sunfire [ ] 64 Sunspot [ ] 65 Surge [ ] 66 Wallflower [ ] 67 Warpath [ ] 68 Wicked [ ] 69 Wind Dancer [ ] 70 Wolfsbane [ ] 71 Wolverine [ ] 72 X-23 Nemesis (1:8 packs) # Card Title [ ] N1 Mr. Sinister by Greg Land [ ] N2 Magneto by Sean Chen and Sandu Florea [ ] N3 Mystique by Mike Mayhew [ ] N4 Sabretooth by Paolo Rivera [ ] N5 Mojo by Frank Cho [ ] N6 Apocalypse by Salvador Larroca [ ] N7 Juggernaut by Sean Chen [ ] N8 Sentinels by Marc Silvestri and Joe Weems [ ] N9 Brotherhood of Evil Mutants by David Finch Cover Gallery -

Spider Man Far from Home Release
Spider Man Far From Home Release EdselSlantwise sensationalise and triform herFritz crosspieces perspire so gabs conterminously while Rutherford that Sunny supernaturalises soothsayings some his inlanders.apoenzymes Jovial often. and Bennie parvenu weightlessness.hire his provenience adored disquietly or steeply after Joel jargonised and blaring untruly, unvarying and Behind The Voice Actors. Man: Far From Home executive producer talked about bringing Mysterio to life with Marvel Design Team concept artist Ryan Meinerding. Harry Cohn always placed a high priority on serials. Flash Thompson is almost always right around the corner ready to make his life harder. Man No Way Home footage yet? Man in your review helpful tips on the imdb rating will probably wait until the opportunity arose to terms and humanoid to intercept a man far from home is a gym reappearing in. Black Friday that was good movie. Share with your family, download to watch offline, and cancel anytime. On top of that, his motives and overall goals are a little difficult to follow. Just throwing that out there. The night of the attack, Fury meets Parker in person and introduces him to Beck. Of course, no superhero film works without their bad guy. Marvel Movies: Spidey may have only just swung into theaters, but there are plenty waiting to watch it at home. Man: Far From Home are on sale now. Man in this Special Features clip. No, it does not include the extended cut. Use the newly formed team, from home are like, she sacrificed something she grew up being rather than ever created a red cape to. -
TSR6907.MHR2.Webs-Th
WEBS: The SPIDER-MAN Dossier The GRANDMASTER Log by Scott Davis Table of Contents Introduction ……………………………………………………………………………………………….. 2 GRANDMASTER Log Entries …………………………………………………………………………... 3 SPIDER-MAN ……………………………………………………………………………………………… 3 SPIDER-MAN Supporting Cast ……………………………………………………………………………. 7 SPIDER-MAN Allies ……………………………………………………………………………………… 10 SPIDER-MAN Foes ……………………………………………………………………………………….. 18 An Adventurous Week …………………………………………………………………………………… 56 Set-up ………………………………………………………………………………………………………. 56 Timelines …………………………………………………………………………………………………… 58 Future Storyline Tips ……………………………………………………………………………………….. 64 Credits: Design: Scott Davis Art Coordination: Peggy Cooper Editing: Dale A. Donovan Typography: Tracey Zamagne Cover Art: Mark Bagley & John Romita Cartography: Steven Sullivan Interior & Foldup Art: The Marvel Bullpen Design & Production: Paul Hanchette This book is protected under the copyright law of the United States of America. Any reproduction or unauthorized use of the material or artwork herein is prohibited without the express written consent of TSR, Inc. and Marvel Entertainment Group, Inc. The names of the characters used herein are fictitious and do not refer to any persons living or dead. Any descriptions including similarities to persons living or dead are merely coincidental. Random House and its affiliate companies have worldwide distribution rights in the book trade for English language products of TSR, Inc. Distributed to the book and hobby trade in the United Kingdom by TSR Ltd. Distributed to the toy and hobby trade by regional distributors. MARVEL SUPER HEROES and MARVEL UNIVERSE are trademarks of Marvel Entertainment Group, Inc. All Marvel characters, character names, and the distinctive likenesses thereof are trademarks of Marvel Entertainment Group, Inc. 1992 Marvel Entertainment Group, Inc. All Rights Reserved. The TSR logo is a trademark owned by TSR, Inc. 1992 TSR, Inc. All Rights Reserved. Printed in the U.S.A. TSR, Inc. -

Children of the Atom Is the First Guidebook Star-Faring Aliens—Visited Earth Over a Million Alike")
CONTENTS Section 1: Background............................... 1 Gladiators............................................... 45 Section 2: Mutant Teams ........................... 4 Alliance of Evil ....................................... 47 X-Men...................................... 4 Mutant Force ......................................... 49 X-Factor .................................. 13 Section 3: Miscellaneous Mutants ........................ 51 New Mutants .......................... 17 Section 4: Very Important People (VIP) ................. 62 Hellfire Club ............................. 21 Villains .................................................. 62 Hellions ................................. 27 Supporting Characters ............................ 69 Brotherhood of Evil Mutants ... 30 Aliens..................................................... 72 Freedom Force ........................ 32 Section 5: The Mutant Menace ................................79 Fallen Angels ........................... 36 Section 6: Locations and Items................................83 Morlocks.................................. 39 Section 7: Dreamchild ...........................................88 Soviet Super-Soldiers ............ 43 Maps ......................................................96 Credits: Dinosaur, Diamond Lil, Electronic Mass Tarbaby, Tarot, Taskmaster, Tattletale, Designed by Colossal Kim Eastland Converter, Empath, Equilibrius, Erg, Willie Tessa, Thunderbird, Time Bomb. Edited by Scintilatin' Steve Winter Evans, Jr., Amahl Farouk, Fenris, Firestar, -

Introduction to the Life of Karma Pakshi (1204/6-1283)
BULLETIN OF TIBETOLOGY 25 INTRODUCTION TO THE LIFE OF KARMA PAKSHI (1204/6-1283) CHARLES E. MANSON Bodleian Library, Oxford University A human life, in chronological terms, is usually measured between birth and death. For a person who makes claims, or for whom claims are made, to have had experience of particular previous lives and to expect future human existences as a specific ecclesiastic figure, the rules of time and mortality could be said to be less rigid. Such a figure was Karma Pakshi (1204/6-1283), reputed to be the emanation of a renowned meditator, Dus gsum mkhyen pa (Dusum Khyenpa, 1110- 11?3).1 To investigate the evidence for the activities of Karma Pakshi in one lifetime, it is proposed in this essay to pay particular attention to the more concrete aspects of his time alive in the human physical form that commonly was associated with the name 'Karma Pakshi', before presenting, analysing and assessing the spiritual aspects of his life. In short, in current terms, first focusing on 'the real'. Naturally, the significance of Karma Pakshi's life is more important for the processes he instigated or influenced and the ideas he communicated, but in order to understand better such significance, the physical aspects of his life will first be defined. Such focusing will have a tendency to put aside, for the time being, his visionary experiences. In relation to a thaumaturge renowned for his visions, premonitions and predictions, this is a large exclusion, but it is justifiable as an attempt to delineate the structure of his life in terms of time, place, and physical event before considering the intellectual and spiritual aspects of his life. -

Explorations 2014 Final Draft
Chanokporn Chutikamoltham ! Pleasure of Abjection: Cheap Thai Comics as Cultural Catharsis CHANOKPORN CHITIKAMOLTHAM School of Oriental and African Studies, University of London ! AUTHOR BIOGRAPHY Chanokporn Chutikamoltham is currently a doctoral candidate in the Centre for Cultural, Liter- ary and Postcolonial Studies at School of Oriental and African Studies. Her research interests !focus on cultural theory and popular culture in Thailand. Cheap Thai comics (khatoon lem la baht) are an overlooked cultural product. In this paper, I argue that cheap Thai comics are cultural products with subaltern credentials due to their production process and the location of their distribution. Moreover, their status as an example of vernacular Thai culture segregates them from mainstream culture as they do not conform to official Thai cultural norms. The rigid and static interpretation of culture by the Thai state in its shaping of ‘Thainess’ (khwam-pen-thai) creates and sup- ports patterns of cultural marginalization. The paper further adopts a psychoanalytical lens in its analysis of cheap Thai comics. Drawing on Julia Kristeva’s notion of abjection, I argue that these comics serve the purpose of cultural catharsis by allowing vicarious experience to release repressed emotions. Despite their grotesque visuals and storylines, they are Buddhist didactic parables, conveying Buddhist messages such as morality and law of karma. Furthermore, cheap comics rely upon the aesthetics of horror and evidence an !idiosyncratic artistic style. Cheap Thai comics, commonly referred to by Thais to argue that cheap comics work as cultural catharsis. as one-baht comics (khatoon lem la baht), are an ex- Furthermore, I argue that cheap comics also have a ample of an often overlooked cultural material. -

Guest Starring Mr. Frump!
6 NOV 2017 Guest Starring Mr. Frump! 0 Spider-Man and his Amazing Friends! In this issue, we explore the fun world of This is a semi-complete list of inhabitants of Earth-8107! Many remember waking up on Earth-8107: Saturday morning to watch the cartoons – The Incredible Hulk, Spider-Woman, and Spider-man Heroes: and his Amazing Friends! Spider-Man (Peter Parker) Firestar (Angelica Jones) EARTH-8107 Iceman (Bobby Drake) Lightwave (Aurora Dante) Not much is really known about the parallel world S.H.I.E.L.D. known as Earth-8107. In general it seems, in Hiawatha Smith many ways, to mimic Earth-616, the mainstream Captain America (Steve Rogers) universe and in other ways it is completely Iron Man (Tony Stark) different. Thor (Donald Blake) Hulk (Bruce Banner) While there are heroes and villains on this Earth, She-Hulk (Jennifer Walters) little is known about their individual histories. Professor X (Charles Xavier) There is a Captain America, but there is no Cyclops (Scott Summers) mention of him having fought in World War II. Angel (Warren Worthington III) There is a Red Skull, who was the right hand man Marvel Girl (Jean Grey) of Adolf Hitler and who fought the allies during Beast (Hank McCoy) WW2, but there is no mention of him ever having Wolverine (Logan) fought or encountered Captain America. Storm (Ororo Munroe) Nightcrawler (Kurt Wagner) Furthermore there are the individual members of Colossus (Piotr Rasputin) the Avengers, but there is only a brief mention of Thunderbird (John Proudstar) Captain America being the 'Star Spangled Sunfire (Shiro Yoshida) Avenger' with no further mention of the group at Sprite (Kitty Pryde) all.