"Empirical Photometric Control of CTX" —— Robbins Et Al
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Exoplanet Exploration Collaboration Initiative TP Exoplanets Final Report
EXO Exoplanet Exploration Collaboration Initiative TP Exoplanets Final Report Ca Ca Ca H Ca Fe Fe Fe H Fe Mg Fe Na O2 H O2 The cover shows the transit of an Earth like planet passing in front of a Sun like star. When a planet transits its star in this way, it is possible to see through its thin layer of atmosphere and measure its spectrum. The lines at the bottom of the page show the absorption spectrum of the Earth in front of the Sun, the signature of life as we know it. Seeing our Earth as just one possibly habitable planet among many billions fundamentally changes the perception of our place among the stars. "The 2014 Space Studies Program of the International Space University was hosted by the École de technologie supérieure (ÉTS) and the École des Hautes études commerciales (HEC), Montréal, Québec, Canada." While all care has been taken in the preparation of this report, ISU does not take any responsibility for the accuracy of its content. Electronic copies of the Final Report and the Executive Summary can be downloaded from the ISU Library website at http://isulibrary.isunet.edu/ International Space University Strasbourg Central Campus Parc d’Innovation 1 rue Jean-Dominique Cassini 67400 Illkirch-Graffenstaden Tel +33 (0)3 88 65 54 30 Fax +33 (0)3 88 65 54 47 e-mail: [email protected] website: www.isunet.edu France Unless otherwise credited, figures and images were created by TP Exoplanets. Exoplanets Final Report Page i ACKNOWLEDGEMENTS The International Space University Summer Session Program 2014 and the work on the -

The Day the Earth Smiled
National Aeronautics and and Space Space Administration Administration The Day the Earth Smiled www.nasa.gov Mars Pallene’s Ring Venus Mimas Janus Janus’ Ring Prometheus Pandora Spokes Enceladus Epimetheus Clumps Earth and Moon Tethys On July 19, 2013, in an event celebrated the world advance that their photo would be taken from such a For full details of this image, visit: over, NASA’s Cassini spacecraft slipped into Saturn’s great distance. http://saturn.jpl.nasa.gov/photos/imagedetails/index. shadow and turned to image the planet, seven of cfm?imageId=4915 its moons, its rings — and, in the background, our This image, which has been contrast-enhanced home planet, Earth. With the sun’s powerful and to bring out details, spans about 405,000 miles The Cassini mission to Saturn is a cooperative potentially damaging rays eclipsed by Saturn itself, (652,000 kilometers) across. In the lower right of the project of the National Aeronautics and Space Cassini’s onboard cameras were able to take advan- mosaic, in between the diffuse, bluish E ring (the Administration (NASA), the European Space Agency tage of this unique viewing geometry. They acquired outermost ring seen here) and the faint but narrower and the Italian Space Agency. The Jet Propulsion a panoramic mosaic of the Saturn system that allows G ring, is the pale blue dot of our planet, Earth. Look Laboratory, a division of the California Institute of scientists to see details in the rings and throughout closely and you can see the moon protruding from Technology, manages the mission for NASA. -

Exploring Solar-Terrestrial Interactions Via Multiple Observers a White Paper for the Voyage 2050 Long-Term Plan in the ESA Science Programme
Exploring Solar-Terrestrial Interactions via Multiple Observers A White Paper for the Voyage 2050 long-term plan in the ESA Science Programme Pollock et al. 2003 Contact Scientist Graziella Branduardi-Raymont Mullard Space Science Laboratory, University College London Holmbury St Mary, Dorking, Surrey RH5 6NT, UK Tel. +44 (0)1483 204133 [email protected] Exploring Solar-Terrestrial Interactions via Multiple Observers Executive summary The central question we propose to address is: How does solar wind energy flow through the Earth’s magnetosphere, how is it converted and distributed? This is a fundamental science question expressing our need to understand how the Sun creates the heliosphere, and how the planets interact with the solar wind and its magnetic field. This is not just matter of scientific curiosity – it also addresses a clear and pressing practical problem. As our world becomes ever more dependent on complex technology – both in space and on the ground – society becomes more exposed to the vagaries of space weather, the conditions on the Sun and in the solar wind, magnetosphere, ionosphere and thermosphere that can influence the performance and reliability of technological systems and endanger human life and health. This fundamental question breaks down to several sub-questions: 1) How is energy transferred from the solar wind to the magnetosphere at the magnetopause? 2) What are the external and internal drivers of the different magnetospheric regimes? 3) How does energy circulate through the magnetotail? 4) How do behaviours in the North and South hemispheres relate to each other? 5) What are the sources and losses of ring current and radiation belt plasma in the inner magnetosphere? 6) How does feedback from the inner magnetosphere influence dayside and nightside processes? Much knowledge has already been acquired through observations in space and on the ground over the past decades, but the infant stage of space weather forecasting demonstrates that we still have a vast amount of learning to do. -

Tradate, Luned 21 Gennaio 2013
Grruuppppoo Assttrroonnoommiiccoo Trraaddaatteessee ATTIVITA’ 2013 ATTIVITA’ 2013 Via Mameli 13 G RUPPO 21049 TRADATE (Va) A STRONOMICO ITALIA http://www.gruppoastronomicotradatese.it T RADATESE Tel./FAX 0331-810117 C.F. 01673900120 Gennaio 2014 O G G E T T O : resoconto attività del GAT durante l'anno 2013 Nel 2013 (39° anno della nostra Associazione) siamo stati molto impegnati nella preparazione di ben due spedizioni nella Lapponia norvegese a caccia di aurore boreali e in due importanti Congressi. Senza per altro trascurare la solita intensissima attività pubblica e didattica. Ecco, comunque, l ‘usuale sintesi delle nostre attività NORMALI (ovvero istituzionali della nostra Associazione) e delle nostre attività SPECIALI (ossia decise anno per anno dal nostro CD). 1) ATTIVITA' NORMALI : si tratta di conferenze pubbliche e di lezioni scolastiche distribuite lungo TUTTO il corso dell'anno. In totale sono state 97 così distribuite: 1a)CONFERENZE PUBBLICHE A TRADATE, sono state 16, quasi sempre localizzate nell’ accogliente platea del CineTeatro P.GRASSI, di norma sempre molto affollato, con una presenza crescente anche di ragazzi delle scuole superiori. Questo grazie alla nostra abitudine di trattare in maniera rigorosamente scientifica ma nel contempo comprensibile a tutti, i temi di più stretta attualità (il cielo incontaminato delle Ande, i pianeti extrasolari, la materia oscura, il 100° anniversario della Deriva dei continenti, ecc, ecc). Da rimarcare che, pur NON godendo il GAT di alcun finanziamento da parte di Enti pubblici, e pur invitando spesso a Tradate ospiti di grande nome, le nostre serate rimangono, per statuto, sempre libere e gratuite per tutti. (vedi allegato 1a). 1b)LEZIONI PRESSO SCUOLE: sono state 50, con circa 130 ore di lezioni (un vero record !). -
Rocketstem • Vol. 2 No. 3 • May 2014 • Issue 7
RocketSTEMVol. 2 • No. 3 • May 2014 • Issue 7 Join the vast legions of citizen scientists at the Zooniverse 10 years of discovery for Cassini at Saturn Jim Adams aligns NASA technology for future missions All the equipment you need for doing astrophotography Discussing string theory, ice cream, and more with physicist Brian Greene the NASA sponsored Earth Day event April 22, 2014 at Union Station in Washington, DC. NASA announced the mosaic. The image is comprised of more than 36,000 individual photos submitted by people around the world. To view the entire mosaic and related images and videos, please visit: http://go.nasa.gov/1n4y8qp. Credit: NASA/Aubrey Gemignani Contents Follow us online: Brian Greene facebook.com/RocketSTEM Famed theoretical physicist and string theorist educates us on a variety of topics. twitter.com/rocketstem 06 www.rocketstem.org Astrophotography All of our issues are available via Ready to photograph the a full-screen online reader at: stars? We give you a rundown on the equipment you need. www.issuu.com/rocketstem 16 Editorial Staff Managing Editor: Chase Clark Cassini Astronomy Editor: Mike Barrett A decade of discovery and Photo Editor: J.L. Pickering images while orbiting Saturn, Contributing Writers its rings and 62 moons. Mike Barrett • Lloyd Campbell 22 Brenden Clark • Chase Clark Rich Holtzin • Joe Maness Jim Adams Sherry Valare • Amjad Zaidi During his career at NASA, Contributing Photographers Adams has been involved Paul Alers • Mike Barrett with dozens of missions. Dennis Bonilla • Brenden Clark 38 Lark Elliott • Aubrey Gemignani Dusty Hood • R. Hueso Zooniverse Bill Ingalls • Steve Jurvetson W. -
Rocketstem • Vol. 2 No. 3 • May 2014 • Issue 7
RocketSTEMVol. 2 • No. 3 • May 2014 • Issue 7 Join the vast legions of citizen scientists at the Zooniverse 10 years of discovery for Cassini at Saturn Jim Adams aligns NASA technology for future missions All the equipment you need for doing astrophotography Discussing string theory, ice cream, and more with physicist Brian Greene the NASA sponsored Earth Day event April 22, 2014 at Union Station in Washington, DC. NASA announced the mosaic. The image is comprised of more than 36,000 individual photos submitted by people around the world. To view the entire mosaic and related images and videos, please visit: http://go.nasa.gov/1n4y8qp. Credit: NASA/Aubrey Gemignani Contents Follow us online: Brian Greene facebook.com/RocketSTEM Famed theoretical physicist and string theorist educates us on a variety of topics. twitter.com/rocketstem 06 www.rocketstem.org Astrophotography All of our issues are available via Ready to photograph the a full-screen online reader at: stars? We give you a rundown on the equipment you need. www.issuu.com/rocketstem 16 Editorial Staff Managing Editor: Chase Clark Cassini Astronomy Editor: Mike Barrett A decade of discovery and Photo Editor: J.L. Pickering images while orbiting Saturn, Contributing Writers its rings and 62 moons. Mike Barrett • Lloyd Campbell 22 Brenden Clark • Chase Clark Rich Holtzin • Joe Maness Jim Adams Sherry Valare • Amjad Zaidi During his career at NASA, Contributing Photographers Adams has been involved Paul Alers • Mike Barrett with dozens of missions. Dennis Bonilla • Brenden Clark 38 Lark Elliott • Aubrey Gemignani Dusty Hood • R. Hueso Zooniverse Bill Ingalls • Steve Jurvetson W. -

The Day the Earth Smiled
SPACE SCOOP DES NOUVELLES DES QUATRE COINS DE L’UNIVERS 23The juillet Day 2013 the Earth Smiled Something great, something big, something new and very special has just happened! On July 19 2013, the Cassini spacecraft orbiting around Saturn, over a billion kilometres away, was turned around to snap a photograph of the Earth! The photo-shoot was timed perfectly so that the brilliant light of the Sun was blocked by Saturn itself. The beautiful ringed planet looms large in the front of the picture, along with its entire ring system, and the Earth appears as a very distant ‘pale blue dot’. The Earth has been circled in this picture because it's so tiny, you might miss it otherwise! It might be a very small picture, but we're all in it, the billions of us on Earth. For the first time, this space photograph has captured the Saturn system with Earth in natural colour. So, it shows the view exactly as human eyes would see it from that distance! The picture will join a legacy of space-based images of our fragile home. Others include the famous ‘Earthrise’ photograph taken in 1968 by an astronaut from about 380,000 kilometres during the Apollo 8 moon mission and the 1990 ‘Pale Blue Dot’ image captured by Voyager 1 as it soared through space about 6 billion kilometres away from Earth! The event was used as a great opportunity for everyone around the globe to savour just how special our beautiful blue-ocean planet is and how precious life is on it. -

The Day the Earth Smiled
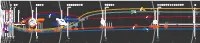
news & views CASSINI–HUYGENS The day the Earth smiled This mosaic, a ‘family photo’ of Saturn, its rings, seven of its moons and three inner planets (Earth, Mars and Venus), was 2 shot on 19 July 2013, while Cassini was 3 10 9 flying in the shadow of Saturn’s disk, with 8 7 the Sun shining behind the planet. This unique view, impossible for an observer on the Earth, allows us, among other 4 5 things, to observe the sunlight scattered 11 by icy particles within the tenuous E ring, 6 continuously resupplied by Enceladus’s 1 plumes. Close to the rings appears a pale 12 dot, our Earth, more than 1.4 billion kilometres away. Looking at this remarkable image the 1 Earth/Moon 3 Venus 5 Pandora 7 Janus 9. Mimas 11. Enceladus prophetic words of Arthur C. Clarke, 2 Mars 4 Prometheus 6 Epimetheus 8 Janus’s ring 10. Pallene’s ring 12. Tethys written well before Cassini arrived at Image credit: NASA/JPL-Caltech/SSI Saturn in 2004, come to mind: “However long you look at Saturn, and fly in and out among its moons, you can never quite believe it. Every so often you We could fly into their shadow, and then that for me best collects the richness find yourself thinking: ‘It’s all a dream, they no longer gleam like silver — they of Saturn’s system. a thing like that can’t be real.’ And you would be a faint blaze, a bridge of smoke go to the nearest view-port — and there across the stars. -

Curriculum Vitae Steven Pinker Department of Psychology Harvard University William James Hall 970 33 Kirkland St., Cambridge, MA
Curriculum Vitae Steven Pinker Department of Psychology Harvard University William James Hall 970 33 Kirkland St., Cambridge, MA 02l38 Office: 617-495-0831 pinker at wjh period Harvard period edu Web site: http://www.stevenpinker.com Twitter: @sapinker ORCID ID https://orcid.org/0000-0002-2319-4085 Biographical Information Born September 18, 1954, Montreal, Canada U. S. Citizen Education Doctor of Philosophy (Experimental Psychology), Harvard University, 1979. Bachelor of Arts (First Class Honors in Psychology), McGill University, 1976. Diploma of College Studies, Dawson College, 1973. Academic Positions 2008-2013 Harvard College Professor, Harvard University 2003- Johnstone Family Professor of Psychology, Harvard University 2000-2003 Peter de Florez Professor, Massachusetts Institute of Technology 1994-99 Director, McDonnell-Pew Center for Cognitive Neuroscience at MIT 1989-2000 Professor, Department of Brain and Cognitive Sciences, Massachusetts Institute of Technology 1985-94 Co-Director, Center for Cognitive Science, Massachusetts Institute of Technology 1985-89 Associate Professor, Department of Brain and Cognitive Sciences, Massachusetts Institute of Technology 1982-85 Assistant Professor, Department of Psychology, Massachusetts Institute of Technology 1981-82 Assistant Professor, Department of Psychology, Stanford University 1980-81 Assistant Professor, Department of Psychology, Harvard University 1979-80 Postdoctoral Fellow, Center for Cognitive Science, Massachusetts Institute of Technology Page 1 of 39 Honors and Awards General: -

Beyond Earth a CHRONICLE of DEEP SPACE EXPLORATION, 1958–2016
Beyond Earth A CHRONICLE OF DEEP SPACE EXPLORATION, 1958–2016 Asif A. Siddiqi Beyond Earth A CHRONICLE OF DEEP SPACE EXPLORATION, 1958–2016 by Asif A. Siddiqi NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Office of Communications NASA History Division Washington, DC 20546 NASA SP-2018-4041 Library of Congress Cataloging-in-Publication Data Names: Siddiqi, Asif A., 1966– author. | United States. NASA History Division, issuing body. | United States. NASA History Program Office, publisher. Title: Beyond Earth : a chronicle of deep space exploration, 1958–2016 / by Asif A. Siddiqi. Other titles: Deep space chronicle Description: Second edition. | Washington, DC : National Aeronautics and Space Administration, Office of Communications, NASA History Division, [2018] | Series: NASA SP ; 2018-4041 | Series: The NASA history series | Includes bibliographical references and index. Identifiers: LCCN 2017058675 (print) | LCCN 2017059404 (ebook) | ISBN 9781626830424 | ISBN 9781626830431 | ISBN 9781626830431?q(paperback) Subjects: LCSH: Space flight—History. | Planets—Exploration—History. Classification: LCC TL790 (ebook) | LCC TL790 .S53 2018 (print) | DDC 629.43/509—dc23 | SUDOC NAS 1.21:2018-4041 LC record available at https://lccn.loc.gov/2017058675 Original Cover Artwork provided by Ariel Waldman The artwork titled Spaceprob.es is a companion piece to the Web site that catalogs the active human-made machines that freckle our solar system. Each space probe’s silhouette has been paired with its distance from Earth via the Deep Space Network or its last known coordinates. This publication is available as a free download at http://www.nasa.gov/ebooks. ISBN 978-1-62683-043-1 90000 9 781626 830431 For my beloved father Dr. -
Solar System Tight
Images courtesy of: NASA Probe routes courtesy of: NASA and National Geographic Information courtesy of: Wikipedia, NASA, NSSDC, This infographic focuses on the exploration of our UNISEC, ISAS, BMDO, ESA, SAS, CSA, ASI, DLR, RKA, Solar System through the lens of space exploration ISRO, JAXA, HGS, BWF that took place since its inception sixty years ago. The routes of eight space probes are tracked and select- ed images from its vantage points are shown to pro- vide you with a view of our solar system through the MOON PHOBOS DEIMOS IO EUROPA CALLISTO GANYMEDE MIMAS ENCELADUS TETHYS DIONE RHEA TITAN HYPERION IAPETUS lens of the space probes. MIRANDA ARIEL UMBRIEL TITANIA OBERON NAIAD THALASSA DESPINA GALATEA LARISSA PROTEUS TRITON NEREID HALIMEDE SAO LAOMEDEIA PSAMANTHE NESO DEIMOS This segment shows the FAILED NASA CSA DLR ISAS BMDO amount of space probes released from the different SUCCESS USSR SAS RKA UNISEC HGS space stations on earth. ESA ASI ISRO JAXA BWF The lines represent the route of the space probes as they SOLAR PROBES MARINER 10 GALILEO VOYAGER 1 PIONER 1O PIONEER 11 make their way to explore our solar system. MARS PROBES CASSINI VOYAGER 2 PIONEER 11 NEW HORIZONS PIONEER 11 1985 - 02 1990 INSTRUMENT POWER SHARING PASSED THE ORBIT OF PLUTO BEGAN DUE TO DECLINING GENERATOR POWER OUTPUT 1995 - 09 - 30 PIONEER 11 ROUTINE DAILY MISSION OPERATIONS STOPPED. 1995 - 11 - 30 OPERATOR: NASA/ARC LAST SIGNAL RECIEVED SOLAR PROBES MERCURY PROBES VENUS PROBES LUNAR PROBES MARS PROBES ASTEROID PROBES JUPITER PROBES SATURN PROBES URANUS PROBES COSPAR ID: 1973-019A/SATCAT NO: 6421 NEPTUNE PROBES PLUTO PROBES 04/06/1973, 02:11:00 UTC - LAUNCH DATE VOYAGER 2 PIONEER 10 12/03/1974 - CLOSESTER APPROACH TO JUPITER PIONEER 5 MARINER 10 SPUTNIK 7 LUNA E-1 NO. -
Conservation Corner by Corinne Peterson Pocahontas County Naturalist
Conservation Corner By Corinne Peterson Pocahontas County Naturalist September 27, 2017 Have you been following the final days of the 20-year international Cassini mission to Saturn? If so, you might remember that one of several space events we looked at last spring included Cassini’s Grand Finale. Launched by NASA in 1997, the spacecraft entered Saturn’s orbit in 2004 and in 2005 successfully landed the ESA probe Huygens on Saturn’s largest moon, Titan. As Cassini’s fuel tank read empty, the spacecraft was sent on one last mission. Cassini spent the summer entering the gap between Saturn’s cloud tops and rings 22 times before disintegrating in a final meteoritic blaze on Sept. 15. “The Day the Earth Smiled” ~ July 19, 2013 Solar Eclipse Since prehistoric times, humans have followed the wandering path of Saturn, one of the brightest objects in the night sky. Ancient writings reveal that Babylonian as well as Hindu, Chinese, and Japanese astronomers followed the orbit of Saturn. In 1610, Galileo first viewed Saturn through a modern tele- scope. In 1659, Dutch Astronomer Huygens discovered Saturn’s rings and largest moon, and in the early 1660’s French-Italian Astronomer Cassini discovered four more moons. It wasn’t until the fly-by missions of Pioneer 11 in 1979 and Voyagers 1 and 2 in the early 1980s that close-up images revealed hundreds of rings, similar to the grooves on a phonograph record, and over 60 moons. Cassini, however, is the only spacecraft to ever orbit Saturn, and its mission’s findings will help rewrite the science books.