A Low Cost Position Sensing Method with Optical Sensors for Switched Reluctance Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Republic of Korea Health System Review
Health Systems in Transition Vol. 11 No. 7 2009 Republic of Korea Health system review Chang Bae Chun • Soon Yang Kim Jun Young Lee • Sang Yi Lee Health Systems in Transition Chang Bae Chun, National Health Insurance Corporation Soon Yang Kim, Yeungnam University Jun Young Lee, University of Seoul Sang Yi Lee, Jeju National University Republic of Korea: Health System Review 2009 The European Observatory on Health Systems and Policies is a partnership between the World Health Organization Regional Offi ce for Europe, the Governments of Belgium, Finland, Norway, Slovenia, Spain and Sweden, the Veneto Region of Italy, the European Investment Bank, the World Bank, the London School of Economics and Political Science, and the London School of Hygiene & Tropical Medicine. Keywords: DELIVERY OF HEALTH CARE EVALUATION STUDIES FINANCING, HEALTH HEALTH CARE REFORM HEALTH SYSTEM PLANS – organization and administration REPUBLIC OF KOREA © World Health Organization 2009 on behalf of the European Observatory on Health Systems and Policies All rights reserved. The European Observatory on Health Systems and Policies welcomes requests for permission to reproduce or translate its publications, in part or in full. Please address requests about the publication to: Publications WHO Regional Offi ce for Europe Scherfi gsvej 8 DK-2100 Copenhagen Ø, Denmark Alternatively, complete an online request form for documentation, health information, or for permission to quote or translate, on the Regional Offi ce web site (http://www.euro.who.int/PubRequest) The views expressed by authors or editors do not necessarily represent the decisions or the stated policies of the European Observatory on Health Systems and Policies or any of its partners. -

Changyi Park Curriculum Vitae
Changyi Park Curriculum Vitae Professor Contact j Department of Statistics Office: +82-2-6490-2634 Information j University of Seoul Fax: +82-2-6490-2629 j 704 Mirae Hall E-mail: [email protected] j Seoul Siripdae-ro 163 (Jeonnong-dong) Website: statlearn.uos.ac.kr j Dongdaemun-gu, Seoul 02504 Korea Education Ph.D., Statistics, The Ohio State University, August 2005. Thesis: Generalization Error Rates for Margin-based Classifiers. Adviser: Professor Xiaotong Shen. Area of Study: Statistical learning theory. Ph.D. program, Statistics, Seoul National University, 1998 { 1999. M.S., Statistics, Seoul National University, February 1996. Adviser: Professor Jongweoo Jeon. B.S., Computer Science and Statistics, Seoul National University, Febru- ary 1994. Positions Professor, Department of Statistics, University of Seoul, 2017 { Associate Professor, Department of Statistics, University of Seoul, 2012 { 2017. Assistant Professor, Department of Statistics, University of Seoul, 2008 { 2012. Research Assistant Professor, Institute of Statistics, Korea University, 2005 { 2008. Supervisor: Professor Ja-Yong Koo. Grant: Statistical Modeling of Complex Structured Data and its Ap- plications (KRF-2005-070-C00020). Administrative Appointments Chair, School of Cross-disciplinary Studies, University of Seoul, March{ August 2020. Chair, School of Cross-disciplinary Studies, University of Seoul, 2016{ 2017. Chair, Department of Statistics, University of Seoul, 2013{2014. Honors and Awards Best Paper Award, Korean Data & Information Society, November 2019. Excellent Research Award, University of Seoul, 2010. Excellent Research Award, University of Seoul, 2009. 1/8 Research Grants National Research Foundation (NRF-2020R1F1A1A01048268): Develop- ment of Kernel Feature Selection Methods in Machine Learning. 156,774,000 (KRW), 06/01/20 - 02/28/23, PI. -

University of Seoul, a University That Leads the Future Value and the Spirits of Times
UNIVERSITY OF SEOUL University of Seoul 163 Seoulsiripdae-ro University of Seoul, a university that leads the Dongdaemun-gu, Seoul 02504 Republic of Korea www.uos.ac.kr future value and the spirits of times. Contents Message from the President 03 History of UOS 05 Innovation 2030+ 06 UOS Power 10 UOS in Numbers 14 Colleges 20 Graduate Schools 21 Relevant Incorporations 22 International Programs 23 Programs for International Students 24 Living at UOS 36 Partner Institutions of UOS 38 Campus Map 40 The main gate of University of Seoul Message from the President 03 Over the next 100 years, the University of Seoul will take the lead in creating the spirits of the times and establishing the future value. Since opening its doors in 1918, the University of Seoul has been a proud public university of Seoul, the capital of the Republic of Korea. The university now boasts 100 years of great history and tradition. The University of Seoul has contributed to the country and society in various aspects through cultivating individuals' talent and through academic research, responding to the needs of the times. Based on infallible support from the city of Seoul, the University of Seoul has grown into one of the most prestigious universities in Korea with the highest level of investment in education and scholarships among national and public universities in the nation. Welcoming another 100 years, the University of Seoul will take the lead in creating a spirit of the times that we should succeed and develop, as well as establishing the social, economic, and cultural values that our society will require in the future based on our ideals of education, truth, creation, and service, with our background of accumulated knowledge and experience. -
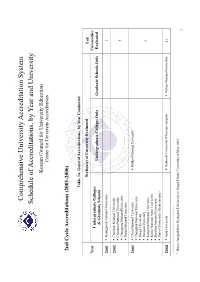
Schedule of Accreditations, by Year and University
Comprehensive University Accreditation System Schedule of Accreditations, by Year and University Korean Council for University Education Center for University Accreditation 2nd Cycle Accreditations (2001-2006) Table 1a: General Accreditations, by Year Conducted Section(s) of University Evaluated # of Year Universities Undergraduate Colleges Undergraduate Colleges Only Graduate Schools Only Evaluated & Graduate Schools 2001 Kyungpook National University 1 2002 Chonbuk National University Chonnam National University 4 Chungnam National University Pusan National University 2003 Cheju National University Mokpo National University Chungbuk National University Daegu University Daejeon University 9 Kangwon National University Korea National Sport University Sunchon National University Yonsei University (Seoul campus) 2004 Ajou University Dankook University (Cheonan campus) Mokpo National University 41 1 Name changed from Kyungsan University to Daegu Haany University in May 2003. 1 Andong National University Hanyang University (Ansan campus) Catholic University of Daegu Yonsei University (Wonju campus) Catholic University of Korea Changwon National University Chosun University Daegu Haany University1 Dankook University (Seoul campus) Dong-A University Dong-eui University Dongseo University Ewha Womans University Gyeongsang National University Hallym University Hanshin University Hansung University Hanyang University Hoseo University Inha University Inje University Jeonju University Konkuk University Korea -

South Korea 2018
Office of International Education Country Report South Korea Highlights UGA’s Department of Public Admin- istration has a dual M.P.A. degree with Seoul National University, where students earn degrees from both institutions by taking a year of courses at each. Public Administration also provides training to Korean public servants in the Min- istry of Personnel Management and sends UGA students to study civic government in Seoul each summer. South Korea is also a valuable partner for joint academic output with the main areas of co-publication including: Biochemistry and Molecular Biology and Genetics and Heredity. South Korea sent the 3rd most international students to UGA in Fall 2016. January 2018 Active Partnerships Joint Publications UGA Students Abroad Rank Rank Rank 13 4 505 6 67 10 Visiting Scholars UGA Faculty Visits International Students Rank Rank 93 2 45 253 3 UGA Education Abroad in South Korea During the 2016-2017 academic year, 67 UGA students studied in South Korea, many of whom went on reciprocal student exchanges. Current study abroad programs in South Korea include: Program City/Destination Focus Korean Teaching Internship Nonsan Internship Seoul National University Seoul Dual Degree Dual MPA SPIA in Seoul Seoul Study Abroad Sogang University Seoul Exchange Yonsei University Seoul Exchange Yonsei University Interna- Fukuoka Summer School tional Summer School Academic Collaboration in Korea During 2007-2017, UGA faculty collaborated with colleagues in South Korea to joint- ly publish 505 scholarly articles. Top areas of cooperation during this period included: Biochemistry and Molecular Biology and Genetics and Heredity. Top collaborating insti- tutions in South Korea during this period included Korea University and Seoul National University. -
Kobe University Repository : Thesis
Kobe University Repository : Thesis 学位論文題目 The role of L1 and L2 orthography on loanword phonology(外来語音韻 Title 論におけるL1とL2つづり字の役割) 氏名 Kwon, Yeonjoo Author 専攻分野 博士(文学) Degree 学位授与の日付 2014-03-25 Date of Degree 公開日 2015-03-01 Date of Publication 資源タイプ Thesis or Dissertation / 学位論文 Resource Type 報告番号 甲第6031号 Report Number 権利 Rights JaLCDOI URL http://www.lib.kobe-u.ac.jp/handle_kernel/D1006031 ※当コンテンツは神戸大学の学術成果です。無断複製・不正使用等を禁じます。著作権法で認められている範囲内で、適切にご利用ください。 PDF issue: 2021-10-08 P a g e | 1 博士論文 2013 年 12 月 10 日 The role of L1 and L2 orthography on loanword phonology (外来語音韻論における L1 と L2 つづり字の役割) 神戸大学大学院人文学研究科博士課程 後期課程 社会動態専攻 言語学 権延姝 Kwon Yeonjoo P a g e | 2 The role of L1 and L2 orthography on loanword phonology Table of Contents 1. Introduction ............................................................................................................................................ 6 1.1. Problems in Korean words borrowed from foreign language ................................................. 6 1.3. What is loanword? ................................................................................................................... 7 1.4. Why loanword phonology? .................................................................................................... 11 1.5. Previous studies on loanword phonology .............................................................................. 11 1.6. Outline of the thesis ............................................................................................................... 12 2. Previous -

Hanyang University (HU)
Hanyang University (HU) Partner Information Type of University Private Location Seoul, Korea Founded 1939 Population of City 9.82 million President/Vice- Kim Woo-seung (Male) # of Students 35,324 Chancellor Web Page www.hanyang.ac.kr/english/ # of Faculty 4,686 Faculties/Colleges/Schools/Majors: Faculties • Engineering • Art and Physical Education • Medicine • Music • Humanities • Division of International Studies • Social Sciences • Nursing • Natural Sciences • Industrial Convergence • Policy Science • Education • Economics and Finance • Human Ecology • Business • Law Other U.S. Partners: To see full list of U.S. partners please refer to this link. http://www.hanyang.ac.kr/web/eng/overseas-partners Partner Contacts: Chong Seung Yoon Vice President for International Affairs [email protected] GSU Information Length of GSU 14 years Relationship Current Agreements: GSU College of Arts and Sciences –Program Specific Agreement for a Student Exchange (2005 – 2024) • Program Director: Kim Reimann Prior Agreements: University-Wide Memorandum of Cooperation (2013-2018) • Program Director: Wolfgang Schlör • Partner Contact: Ki-jeong Lee GSU Robinson College of Business- Program Specific Agreement for Student Exchange (2008 - 2011) • Program Director: Andria Reddick Current GSU Engagements: GSU and HU at EAIE Conference (Sep 2019) Dr. Wolfgang Schlör (GSU Associate Provost of International Initiatives), Chong-Seung Yoon (HU Vice President of International Affairs), Hyemin Yoo (Manager of Outbound Exchange at Seoul Campus), Yoori Choi (Associate Manager of Inbound Exchange & Visiting Coordinator at ERICA campus), and Seungwoo Hong (Coordinator of Inbound Exchange & Visits) will attend the European Association for International Education (EAIE) Conference in Helsinki, Finland from Sep 24 – 27, 2019. During the EAIE conference Dr. -

Education for Democracy and Social Justice Global, National, and Local Contexts
The 19th International Conference on Education Research Education for Democracy and Social Justice Global, National, and Local Contexts October 17~19, 2018 Seoul National University, Hoam Faculty House E-M AIL [email protected] Homepage (Registration) www.icer.snu.ac.kr Co-hosted by Organized by Cooperated by Department of Education Education Research Institute Global Education Cooperation of Seoul National University The 19th International Conference on Education Research Education for Democracy and Social Justice Greetings Invited Scholars As Director of the Seoul National University Education Research Institute, and as the co-chair of this year’s ICER, I would Hyo-Je Cho Fazal Rizvi like to extend to all participants in this conference my heartfelt welcome and gratitude. Also, I would like to spend a short ■ Professor, Sungonghoe University ■ Professor, University of Melbourne time acknowledging our other co-hosts: the Gyeonggido Office of Education, the Korea Education Development Institute Rethinking Democracy/Human Rights Education on the ■ Fellow, Academy of the Social Sciences in Seventieth Anniversary of the Universal Declaration of Australia (KEDI), the Korea Institute for Curriculum and Evaluation (KICE), and the Korean Education Sociology Association. Human Rights Global Connectivity and its Ethical Challenges in Furthermore, I would also like to acknowledge the cooperating organizations: the Global Partnership for Education (GPE), Education Springer as well as Pakyoungsa. Melanie Walker ■ Professor, University of the Free State Leon Tikly As we are now set to seek a new paradigm of education, the centrality of education has started to shift from delivering Education and Democracy Capabilities ■ Professor, University of Bristol knowledge to nurturing advanced capacities such as problem-solving skills and creative thinking abilities. -
Q 3 -01 -201 My Name Is Ruben Klein and I Am a Third-Year Bachelor Student in International Business Administration at Radboud University in Nijmegen
DUO-KOREA STUDENT FELLOW ESSAY FORM 1. DUO-Korea Identification Number: 2. Originating Institution (Country): Radboud University, the Netherlands 3. Destination Institution (Country): University of Seoul 4. Exchange Period: Fall 2017 5. Major: Business Administration 6. Name: Ruben Klein 7. Language used for Lectures in Destination Institution: English (If it was mixed with English and Vernacular, please specify percentage of each language.) Topics to include but not limited to the following in minimum A4 3 pages (font size 12, single spaced); 1. Classes taken in host institution, progress and accomplishment (result) 2. Off-Campus Activities (e.g. extracurricular or community activities) 3. Things learned from exchange experience (with anecdote) 4. Advice to future exchange student fellows CCEPTANCE OF RELEASE OF INFORMATION I authorize ASEM-DUO Fellowship Programme to publish my name and all persons or entities acting pursuant to ASEM-DUO Fellowship Programme's permission or authority, all rights to use my name. I understand that my name may be used for educational, advertising, and promotionalpurposes in all conventional and electronic media, and any future media. I also authorize the use of any printed material in connection therewith. Signature: Date: Q 3 -01 -201 My Name is Ruben Klein and I am a third-year bachelor student in International Business Administration at Radboud University in Nijmegen. One of the obligatory parts of the International Business Administration program at Radboud University is that during the first semester of the third year you go abroad. When the time came for me to choose a university somewhere abroad the choice for one in Seoul was not a very hard one. -

Ji Yeol Jimmy Oh, CV – July 2019
Ji Yeol Jimmy Oh, CV – July 2019 JI YEOL JIMMY OH This Version: July 2019 School of Business #513 E-mail: [email protected], Hanyang University [email protected] Wangsimni-ro 222, Seongdong-gu, Seoul Office Tel: +82 (0)2 2220 2689 04763 Republic of Korea Mobile: +82 (0)10 2389 0890 ACADEMIC EMPLOYMENT 2015- Assistant Professor of Finance, School of Business, Hanyang University 2012-2015 Lecturer/Assistant Professor of Economics, Korea Military Academy (KMA) * Fulfilling mandatory military service requirement as army officer 2012-15 ACADEMIC POSITIONS HELD 2016- Track Chair, Finance MBA, Hanyang University Business School 2016-2018 Track Chair, Finance Area, Graduate School, Hanyang University Business School EDUCATION 2008-2012 Ph.D. in Economics, University of Cambridge Thesis Title: Essays on Modelling Financial Markets with Ambiguity and Liquidity Constraints Supervisor: Demosthenes N. Tambakis (Cambridge) Committee: Amil Dasgupta (LSE), Jayant V. Ganguli (Essex) 2007-2008 M.Phil. in Economics (with distinction), University of Cambridge 2004-2007 B.A. in Economics, University of Cambridge PUBLICATION IN REFEREED JOURNALS 2019 Beta or duration? Risk-taking by balanced mutual funds in Korea, with Keun Woo Park (Hanyang) and Min Yeon Han (Hanyang), Finance Research Letters, forthcoming. Foreigners at the gate? Foreign investor trading and the disposition effect of domestic individual investors, with Keun Woo Park (Hanyang) and Seong Hoon Jeong (Daegu Catholic), North American Journal of Economics and Finance 49, 165-180. Investor behavior around monetary policy announcements: Evidence from the Korean stock market, with Keun Woo Park (Hanyang) and Da Hea Hong (Korea Risk Management Co.), Finance Research Letters 28, 355-362. -
KOREA at SOAS
KOREA at SOAS CentreKOREA of Korean at SOAS Studies, SOAS Annual Review Centre of Korean Studies, SOAS Annual Review September 2008 - August 2009 2008/2009 CENTRE OF KOREAN STUDIES (CKS) MEMBERS Dr Lucien BROWN Research Fellow Centre of Korean Studies [email protected] Dr Jae Hoon YEON Reader in Korean Language and Literature Dr Dae-oup CHANG Chair, Centre of Korean Studies Lecturer in Development Studies Department of the Languages and Cultures of Japan and Korea Department of Development Studies [email protected] [email protected] Dr Charlotte HORLYCK Lecturer in the History of Korean Art Department of Art and Archaeology Current Honorary Appointments [email protected] Professorial Research Associate: Professor Keith D HOWARD Professor Martina DEUCHLER ~ Oct 2002 - Aug 2011 Professor of Music BA (LEIDEN) PHD (HARVARD) Department of Music [email protected] Research Associate: Dr Owen MILLER ~ Jul 2008 - Aug 2010 Dr Anders KARLSSON PHD BA (LONDON) Lecturer in Korean Studies [email protected] Department of the Languages and Cultures of Japan and Korea [email protected] Dr Youngsook PAK ~ May 2007 - Aug 2010 PHD (UNIVERSITY OF HEIDELBERG) Dr Stefan KNOOB [email protected] Research Fellow Centre of Korean Studies Visiting Scholars: [email protected] Ms Hakyung CHANG ~ Apr 2009 - Mar 2010 MA BA (SOOK-MYUNG WOMEN’S UNIVERSITY) Dr Grace KOH [email protected] Lecturer in Korean Literature Department of the Languages and Cultures of Japan and Korea Professor Sang Hie HAN ~ Mar 2009 - Feb 2010 [email protected] PHD LLM LLB (SEOUL NATIONAL UNIVERSITY) [email protected] Dr Tat -

Kyung Hee University Bulletin 경희대영문요람원고 최종2 1 2012.2.24 4:28 PM 페이지2 004 경희대영문요람원고 최종2 1 2012.2.24 4:28 PM 페이지3 004
경희대영문요람원고_최종2_1 2012.2.24 4:28 PM 페이지1 004 2011-2012 Kyung Hee University Bulletin 경희대영문요람원고_최종2_1 2012.2.24 4:28 PM 페이지2 004 경희대영문요람원고_최종2_1 2012.2.24 4:28 PM 페이지3 004 :: KYUNG HEE’S MISSION In a century marked by two world wars, global ideological conflict, and the omnipresent specter of nuclear destruction, the United Nations has been a beacon of hope in a sea of distress. Kyung Hee University recognizes the United Nations’role in its effort to obtain universal peace and understanding. In this vein, the university seeks to emulate those ideals in its educational system. The university ’s emblem is thus modeled after that of the United Nations, and its school song, which praises peace and liberty, resonates with its commitment to those ideals. The university pursues the United Nations ’ideals through its commitment to creativity, progress, and cooperation, thereby hoping to promote the role of intellectuals and academics in world affairs. To engage intellectuals directly with world events, the university has initiated several international movements, especially the Global Cooperation Society Movement (GCS) which is comparable to Oxford University ’s Moral Rearmament Movement (MRA). The GCS strives to protect human rights, build a society of freedom and equality, and ultimately, attain world peace. The Movement for Better Living and the Movement for a Brighter Society (both initiated by Chancellor Choue) also embody the humanistic spirit of the university. Kyung Hee University strives to bridge cultural and social gaps by promoting mutual understanding and prosperity. As a result, the university encourages frequent exchanges with sister schools overseas to facilitate the exchange of ideas.