Magnetic Units and Measurements AN0045
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Units and Magnitudes (Lecture Notes)
physics 8.701 topic 2 Frank Wilczek Units and Magnitudes (lecture notes) This lecture has two parts. The first part is mainly a practical guide to the measurement units that dominate the particle physics literature, and culture. The second part is a quasi-philosophical discussion of deep issues around unit systems, including a comparison of atomic, particle ("strong") and Planck units. For a more extended, profound treatment of the second part issues, see arxiv.org/pdf/0708.4361v1.pdf . Because special relativity and quantum mechanics permeate modern particle physics, it is useful to employ units so that c = ħ = 1. In other words, we report velocities as multiples the speed of light c, and actions (or equivalently angular momenta) as multiples of the rationalized Planck's constant ħ, which is the original Planck constant h divided by 2π. 27 August 2013 physics 8.701 topic 2 Frank Wilczek In classical physics one usually keeps separate units for mass, length and time. I invite you to think about why! (I'll give you my take on it later.) To bring out the "dimensional" features of particle physics units without excess baggage, it is helpful to keep track of powers of mass M, length L, and time T without regard to magnitudes, in the form When these are both set equal to 1, the M, L, T system collapses to just one independent dimension. So we can - and usually do - consider everything as having the units of some power of mass. Thus for energy we have while for momentum 27 August 2013 physics 8.701 topic 2 Frank Wilczek and for length so that energy and momentum have the units of mass, while length has the units of inverse mass. -

On the First Electromagnetic Measurement of the Velocity of Light by Wilhelm Weber and Rudolf Kohlrausch
Andre Koch Torres Assis On the First Electromagnetic Measurement of the Velocity of Light by Wilhelm Weber and Rudolf Kohlrausch Abstract The electrostatic, electrodynamic and electromagnetic systems of units utilized during last century by Ampère, Gauss, Weber, Maxwell and all the others are analyzed. It is shown how the constant c was introduced in physics by Weber's force of 1846. It is shown that it has the unit of velocity and is the ratio of the electromagnetic and electrostatic units of charge. Weber and Kohlrausch's experiment of 1855 to determine c is quoted, emphasizing that they were the first to measure this quantity and obtained the same value as that of light velocity in vacuum. It is shown how Kirchhoff in 1857 and Weber (1857-64) independently of one another obtained the fact that an electromagnetic signal propagates at light velocity along a thin wire of negligible resistivity. They obtained the telegraphy equation utilizing Weber’s action at a distance force. This was accomplished before the development of Maxwell’s electromagnetic theory of light and before Heaviside’s work. 1. Introduction In this work the introduction of the constant c in electromagnetism by Wilhelm Weber in 1846 is analyzed. It is the ratio of electromagnetic and electrostatic units of charge, one of the most fundamental constants of nature. The meaning of this constant is discussed, the first measurement performed by Weber and Kohlrausch in 1855, and the derivation of the telegraphy equation by Kirchhoff and Weber in 1857. Initially the basic systems of units utilized during last century for describing electromagnetic quantities is presented, along with a short review of Weber’s electrodynamics. -

Lawrence Berkeley National Laboratory Recent Work
Lawrence Berkeley National Laboratory Recent Work Title E.E. REVIEW COURSE - LECTURE VIII. Permalink https://escholarship.org/uc/item/733807j5 Authors Martinelli, E. Leppard, J. Perl, H. Publication Date 1952-04-21 eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA UCRT. 1888 Radiation Laboratory Berkeley, California ELECTRICAL ENGINEERING REVIEW COURSE LECTURE VIII April 21, 1952 E. Martinelli (Notes by: J. Leppard, H. -Perl) I. MAG1TETIC FIELDS A. Electrostatic Case Coulomb's Law which is given for th~ electrostatic case can be stated thus~ 2 ~ F = f e1 e2 / r in which F is in dynes, r in centimeters, f = 1 (dimensionless}j'l-gives the value of the charge e, in electro static units (ESU). B. Magnetic Case The magnetic case has an equivalent which was first determined "experi mentally by Ampere. Given two closed loops of wire of length~. Using electromagnetic units (EMU) i is measured in ab amperes = 10 amperes. r is measured in centimeters.· C = 1 (dimensionless). DISCLAIMER This document was prepared as an account of work sponsored by the United States Government. While this document is believed to contain correct information, neither the United States Government nor any agency thereof, nor the Regents of the University of California, nor any of their employees, makes any warranty, express or implied, or assumes any legal responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by its trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or the Regents of the University of California. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -
The Meaning of the Constant C in Weber's Electrodynamics
Proe. Int. conf. "Galileo Back in Italy - II" (Soc. Ed. Androme-:ia, Bologna, 2000), pp. 23-36, R. Monti (editor) The Meaning of the Constant c in Weber's Electrodynamics A. K. T. Assis' Instituto de Fisica 'Gleb Wat.aghin' Universidade Estadual de Campinas - Unicamp 13083-970 Campinas, Sao Paulo, Brasil Abstract In this work it is analysed three basic electromagnetic systems of units utilized during last century by Ampere, Gauss, Weber, Maxwell and all the others: The electrostatic, electrodynamic and electromagnetic ones. It is presented how the basic equations of electromagnetism are written in these systems (and also in the present day international system of units MKSA). Then it is shown how the constant c was introduced in physics by Weber's force. It is shown that it has the unit of velocity and is the ratio of the electromagnetic and electrostatic Wlits of charge. Weber and Kohlrausch '5 experiment to determine c is presented, emphasizing that they were 'the first to measure this quantity and obtained the same value as that of light velocity in vacuum. It is shown how Kirchhoff and Weber obtained independently of one another, both working in the framev.-ork of \Veber's electrodynamics, the fact that an electromagnetic signal (of current or potential) propagate at light velocity along a thin wire of negligible resistivity. Key Words: Electromagnetic units, light velocity, wave equation. PACS: O1.55.+b (General physics), 01.65.+g (History of science), 41.20.·q (Electric, magnetic, and electromagnetic fields) ·E-mail: assisOiCLunicamp.br, homepage: www.lCi.unicamp.brrassis AA. VV•. -
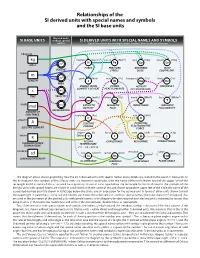
Relationships of the SI Derived Units with Special Names and Symbols and the SI Base Units
Relationships of the SI derived units with special names and symbols and the SI base units Derived units SI BASE UNITS without special SI DERIVED UNITS WITH SPECIAL NAMES AND SYMBOLS names Solid lines indicate multiplication, broken lines indicate division kilogram kg newton (kg·m/s2) pascal (N/m2) gray (J/kg) sievert (J/kg) 3 N Pa Gy Sv MASS m FORCE PRESSURE, ABSORBED DOSE VOLUME STRESS DOSE EQUIVALENT meter m 2 m joule (N·m) watt (J/s) becquerel (1/s) hertz (1/s) LENGTH J W Bq Hz AREA ENERGY, WORK, POWER, ACTIVITY FREQUENCY second QUANTITY OF HEAT HEAT FLOW RATE (OF A RADIONUCLIDE) s m/s TIME VELOCITY katal (mol/s) weber (V·s) henry (Wb/A) tesla (Wb/m2) kat Wb H T 2 mole m/s CATALYTIC MAGNETIC INDUCTANCE MAGNETIC mol ACTIVITY FLUX FLUX DENSITY ACCELERATION AMOUNT OF SUBSTANCE coulomb (A·s) volt (W/A) C V ampere A ELECTRIC POTENTIAL, CHARGE ELECTROMOTIVE ELECTRIC CURRENT FORCE degree (K) farad (C/V) ohm (V/A) siemens (1/W) kelvin Celsius °C F W S K CELSIUS CAPACITANCE RESISTANCE CONDUCTANCE THERMODYNAMIC TEMPERATURE TEMPERATURE t/°C = T /K – 273.15 candela 2 steradian radian cd lux (lm/m ) lumen (cd·sr) 2 2 (m/m = 1) lx lm sr (m /m = 1) rad LUMINOUS INTENSITY ILLUMINANCE LUMINOUS SOLID ANGLE PLANE ANGLE FLUX The diagram above shows graphically how the 22 SI derived units with special names and symbols are related to the seven SI base units. In the first column, the symbols of the SI base units are shown in rectangles, with the name of the unit shown toward the upper left of the rectangle and the name of the associated base quantity shown in italic type below the rectangle. -

SI and CGS Units in Electromagnetism
SI and CGS Units in Electromagnetism Jim Napolitano January 7, 2010 These notes are meant to accompany the course Electromagnetic Theory for the Spring 2010 term at RPI. The course will use CGS units, as does our textbook Classical Electro- dynamics, 2nd Ed. by Hans Ohanian. Up to this point, however, most students have used the International System of Units (SI, also known as MKSA) for mechanics, electricity and magnetism. (I believe it is easy to argue that CGS is more appropriate for teaching elec- tromagnetism to physics students.) These notes are meant to smooth the transition, and to augment the discussion in Appendix 2 of your textbook. The base units1 for mechanics in SI are the meter, kilogram, and second (i.e. \MKS") whereas in CGS they are the centimeter, gram, and second. Conversion between these base units and all the derived units are quite simply given by an appropriate power of 10. For electromagnetism, SI adds a new base unit, the Ampere (\A"). This leads to a world of complications when converting between SI and CGS. Many of these complications are philosophical, but this note does not discuss such issues. For a good, if a bit flippant, on- line discussion see http://info.ee.surrey.ac.uk/Workshop/advice/coils/unit systems/; for a more scholarly article, see \On Electric and Magnetic Units and Dimensions", by R. T. Birge, The American Physics Teacher, 2(1934)41. Electromagnetism: A Preview Electricity and magnetism are not separate phenomena. They are different manifestations of the same phenomenon, called electromagnetism. One requires the application of special relativity to see how electricity and magnetism are united. -

Mechanical Energy
Chapter 2 Mechanical Energy Mechanics is the branch of physics that deals with the motion of objects and the forces that affect that motion. Mechanical energy is similarly any form of energy that’s directly associated with motion or with a force. Kinetic energy is one form of mechanical energy. In this course we’ll also deal with two other types of mechanical energy: gravitational energy,associated with the force of gravity,and elastic energy, associated with the force exerted by a spring or some other object that is stretched or compressed. In this chapter I’ll introduce the formulas for all three types of mechanical energy,starting with gravitational energy. Gravitational Energy An object’s gravitational energy depends on how high it is,and also on its weight. Specifically,the gravitational energy is the product of weight times height: Gravitational energy = (weight) × (height). (2.1) For example,if you lift a brick two feet off the ground,you’ve given it twice as much gravitational energy as if you lift it only one foot,because of the greater height. On the other hand,a brick has more gravitational energy than a marble lifted to the same height,because of the brick’s greater weight. Weight,in the scientific sense of the word,is a measure of the force that gravity exerts on an object,pulling it downward. Equivalently,the weight of an object is the amount of force that you must exert to hold the object up,balancing the downward force of gravity. Weight is not the same thing as mass,which is a measure of the amount of “stuff” in an object. -

Weber's Law and Mach's Principle
Weber's Law and Mach's Principle Andre K. T. Assis 1. Introduction Recently we applied a Weber's force law for gravitation to implement quantitatively Mach's Principle (Assis 1989, 1992a). In this work we present a briefreview of Weher's electrodynamics and analyze in greater detail the compliance of a Weber's force law for gravitation with Mach's Principle. 2. Weber's Electrodynamics In this section we discuss Weber's original work as applied to electro magnetism. For detailed references of Weber's electrodynamics, see (Assis 1992b, 1994). In order to unify electrostatics (Coulomb's force, Gauss's law) with electrodynamics (Ampere's force between current elements), W. Weber proposed in 1846 that the force exerted by an electrical charge q2 on another ql should be given by (using vectorial notation and in the International System of Units): (1) In this equation, (;0=8.85'10- 12 Flm is the permittivity of free space; the position vectors of ql and qz are r 1 and r 2, respectively; the distance between the charges is r lZ == Ir l - rzl '" [(Xl -XJ2 + (yj -yJZ + (Zl -ZJ2j112; r12=(r) -r;JlrI2 is the unit vector pointing from q2 to ql; the radial velocity between the charges is given by fIZ==drlzfdt=rI2'vIZ; and the Einstein Studies, vol. 6: Mach's Principle: From Newton's Bucket to Quantum Gravity, pp. 159-171 © 1995 Birkhliuser Boston, Inc. Printed in the United States. 160 Andre K. T. Assis radial acceleration between the charges is [VIZ" VIZ - (riZ "VIZ)2 + r lz " a 12J r" where drlz dvlz dTI2 rIZ=rl-rl , V1l = Tt' a'l=Tt= dt2· Moreover, C=(Eo J4J)"'!12 is the ratio of electromagnetic and electrostatic units of charge %=41f·1O-7 N/Al is the permeability of free space). -
![Arxiv:1303.1588V2 [Physics.Hist-Ph] 8 Jun 2015 4.4 Errors in the Article](https://docslib.b-cdn.net/cover/6367/arxiv-1303-1588v2-physics-hist-ph-8-jun-2015-4-4-errors-in-the-article-1106367.webp)
Arxiv:1303.1588V2 [Physics.Hist-Ph] 8 Jun 2015 4.4 Errors in the Article
Translation of an article by Paul Drude in 1904 Translation by A. J. Sederberg1;∗ (pp. 512{519, 560{561), J. Burkhart2;y (pp. 519{527), and F. Apfelbeck3;z (pp. 528{560) Discussion by B. H. McGuyer1;x 1Department of Physics, Princeton University, Princeton, New Jersey 08544, USA 2Department of Physics, Columbia University, 538 West 120th Street, New York, NY 10027-5255, USA June 9, 2015 Abstract English translation of P. Drude, Annalen der Physik 13, 512 (1904), an article by Paul Drude about Tesla transformers and wireless telegraphy. Includes a discussion of the derivation of an equivalent circuit and the prediction of nonreciprocal mutual inductance for Tesla transformers in the article, which is supplementary material for B. McGuyer, PLoS ONE 9, e115397 (2014). Contents 1 Introduction 2 2 Bibliographic information 2 3 Translation 3 I. Definition and Integration of the Differential Equations . .3 Figure 1 . .5 II. The Magnetic Coupling is Very Small . .9 III. Measurement of the Period and the Damping . 12 IV. The Magnetic Coupling is Not Very Small . 19 VII. Application to Wireless Telegraphy . 31 Figure 2 . 32 Figure 3 . 33 Summary of Main Results . 39 4 Discussion 41 4.1 Technical glossary . 41 4.2 Hopkinson's law . 41 4.3 Equivalent circuit parameters from the article . 42 arXiv:1303.1588v2 [physics.hist-ph] 8 Jun 2015 4.4 Errors in the article . 42 4.5 Modifications to match Ls with previous work . 42 ∗Present address: Division of Biological Sciences, University of Chicago, 5812 South Ellis Avenue, Chicago, IL 60637, USA. yPresent address: Department of Microsystems and Informatics, Hochschule Kaiserslautern, Amerikastrasse 1, D-66482 Zweibr¨ucken, Germany. -

From Cell to Battery System in Bevs: Analysis of System Packing Efficiency and Cell Types
Article From Cell to Battery System in BEVs: Analysis of System Packing Efficiency and Cell Types Hendrik Löbberding 1,* , Saskia Wessel 2, Christian Offermanns 1 , Mario Kehrer 1 , Johannes Rother 3, Heiner Heimes 1 and Achim Kampker 1 1 Chair for Production Engineering of E-Mobility Components, RWTH Aachen University, 52064 Aachen, Germany; c.off[email protected] (C.O.); [email protected] (M.K.); [email protected] (H.H.); [email protected] (A.K.) 2 Fraunhofer IPT, 48149 Münster, Germany; [email protected] 3 Faculty of Mechanical Engineering, RWTH Aachen University, 52072 Aachen, Germany; [email protected] * Correspondence: [email protected] Received: 7 November 2020; Accepted: 4 December 2020; Published: 10 December 2020 Abstract: The motivation of this paper is to identify possible directions for future developments in the battery system structure for BEVs to help choosing the right cell for a system. A standard battery system that powers electrified vehicles is composed of many individual battery cells, modules and forms a system. Each of these levels have a natural tendency to have a decreased energy density and specific energy compared to their predecessor. This however, is an important factor for the size of the battery system and ultimately, cost and range of the electric vehicle. This study investigated the trends of 25 commercially available BEVs of the years 2010 to 2019 regarding their change in energy density and specific energy of from cell to module to system. Systems are improving. However, specific energy is improving more than energy density. -

AP Physics 2: Algebra Based
AP® PHYSICS 2 TABLE OF INFORMATION CONSTANTS AND CONVERSION FACTORS -27 -19 Proton mass, mp =1.67 ¥ 10 kg Electron charge magnitude, e =1.60 ¥ 10 C -27 -19 Neutron mass, mn =1.67 ¥ 10 kg 1 electron volt, 1 eV= 1.60 ¥ 10 J -31 8 Electron mass, me =9.11 ¥ 10 kg Speed of light, c =3.00 ¥ 10 m s Universal gravitational Avogadro’s number, N 6.02 1023 mol- 1 -11 3 2 0 = ¥ constant, G =6.67 ¥ 10 m kg s Acceleration due to gravity 2 Universal gas constant, R = 8.31 J (mol K) at Earth’s surface, g = 9.8 m s -23 Boltzmann’s constant, kB =1.38 ¥ 10 J K 1 unified atomic mass unit, 1 u=¥= 1.66 10-27 kg 931 MeV c2 -34 -15 Planck’s constant, h =¥=¥6.63 10 J s 4.14 10 eV s -25 3 hc =¥=¥1.99 10 J m 1.24 10 eV nm -12 2 2 Vacuum permittivity, e0 =8.85 ¥ 10 C N m 9 22 Coulomb’s law constant, k =1 4pe0 = 9.0 ¥ 10 N m C -7 Vacuum permeability, mp0 =4 ¥ 10 (T m) A -7 Magnetic constant, k¢ =mp0 4 = 1 ¥ 10 (T m) A 1 atmosphere pressure, 1 atm=¥= 1.0 1052 N m 1.0¥ 105 Pa meter, m mole, mol watt, W farad, F kilogram, kg hertz, Hz coulomb, C tesla, T UNIT second, s newton, N volt, V degree Celsius, ∞C SYMBOLS ampere, A pascal, Pa ohm, W electron volt, eV kelvin, K joule, J henry, H PREFIXES VALUES OF TRIGONOMETRIC FUNCTIONS FOR COMMON ANGLES Factor Prefix Symbol q 0 30 37 45 53 60 90 12 tera T 10 sinq 0 12 35 22 45 32 1 109 giga G cosq 1 32 45 22 35 12 0 106 mega M 103 kilo k tanq 0 33 34 1 43 3 • 10-2 centi c 10-3 milli m The following conventions are used in this exam.