The Correlation of Pedal Position to Tail Rotor Power Requirement on the OH-58A+
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
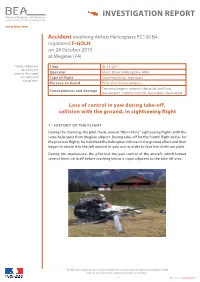
Loss of Control in Yaw During Take-Off, Collision with the Ground, in Sightseeing Flight
INVESTIGATION REPORT www.bea.aero Accident involving Airbus Helicopters EC130 B4 registered F-GOLH on 24 October 2015 at Megève (74) (1)Unless otherwise Time At 11:45(1) specified, the times in this report Operator Mont-Blanc Hélicoptère MBH are expressed Type of flight Commercial air transport in local time. Persons on board Pilot and six passengers Two passengers injured, the pilot and four Consequences and damage passengers slightly injured, helicopter destroyed Loss of control in yaw during take-off, collision with the ground, in sightseeing flight 1 - HISTORY OF THE FLIGHT During the morning, the pilot made several “Mont Blanc” sightseeing flights with the same helicopter from Megève altiport. During take-off for the fourth flight and as for the previous flights, he stabilized the helicopter in hover in the ground effect and then began to rotate it to the left around its yaw axis in order to face the climb-out path. During this manoeuvre, the pilot lost the yaw control of the aircraft, which turned several times on itself before crashing below a slope adjacent to the take-off area. The BEA investigations are conducted with the sole objective of improving aviation safety and are not intended to apportion blame or liabilities. 1/9 BEA-0647.en/January 2018 2 - ADDITIONAL INFORMATION 2.1 Examination of the accident site and wreckage The wreckage is located 25 meters to the north-north/west below the take-off area. Observations indicate that the engine was providing power and that the rotor struck the ground with energy. The cyclic pitch and collective pitch controls are continuous. -

Adventures in Low Disk Loading VTOL Design
NASA/TP—2018–219981 Adventures in Low Disk Loading VTOL Design Mike Scully Ames Research Center Moffett Field, California Click here: Press F1 key (Windows) or Help key (Mac) for help September 2018 This page is required and contains approved text that cannot be changed. NASA STI Program ... in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. to the advancement of aeronautics and space Collected papers from scientific and science. The NASA scientific and technical technical conferences, symposia, seminars, information (STI) program plays a key part in or other meetings sponsored or co- helping NASA maintain this important role. sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information technical, or historical information from Officer. It collects, organizes, provides for NASA programs, projects, and missions, archiving, and disseminates NASA’s STI. The often concerned with subjects having NASA STI program provides access to the NTRS substantial public interest. Registered and its public interface, the NASA Technical Reports Server, thus providing one of • TECHNICAL TRANSLATION. the largest collections of aeronautical and space English-language translations of foreign science STI in the world. Results are published in scientific and technical material pertinent to both non-NASA channels and by NASA in the NASA’s mission. NASA STI Report Series, which includes the following report types: Specialized services also include organizing and publishing research results, distributing • TECHNICAL PUBLICATION. Reports of specialized research announcements and feeds, completed research or a major significant providing information desk and personal search phase of research that present the results of support, and enabling data exchange services. -

Over Thirty Years After the Wright Brothers
ver thirty years after the Wright Brothers absolutely right in terms of a so-called “pure” helicop- attained powered, heavier-than-air, fixed-wing ter. However, the quest for speed in rotary-wing flight Oflight in the United States, Germany astounded drove designers to consider another option: the com- the world in 1936 with demonstrations of the vertical pound helicopter. flight capabilities of the side-by-side rotor Focke Fw 61, The definition of a “compound helicopter” is open to which eclipsed all previous attempts at controlled verti- debate (see sidebar). Although many contend that aug- cal flight. However, even its overall performance was mented forward propulsion is all that is necessary to modest, particularly with regards to forward speed. Even place a helicopter in the “compound” category, others after Igor Sikorsky perfected the now-classic configura- insist that it need only possess some form of augment- tion of a large single main rotor and a smaller anti- ed lift, or that it must have both. Focusing on what torque tail rotor a few years later, speed was still limited could be called “propulsive compounds,” the following in comparison to that of the helicopter’s fixed-wing pages provide a broad overview of the different helicop- brethren. Although Sikorsky’s basic design withstood ters that have been flown over the years with some sort the test of time and became the dominant helicopter of auxiliary propulsion unit: one or more propellers or configuration worldwide (approximately 95% today), jet engines. This survey also gives a brief look at the all helicopters currently in service suffer from one pri- ways in which different manufacturers have chosen to mary limitation: the inability to achieve forward speeds approach the problem of increased forward speed while much greater than 200 kt (230 mph). -

WYVER Heavy Lift VTOL Aircraft
WYVER Heavy Lift VTOL Aircraft Rensselaer Polytechnic Institute 1st June, 2005 1 ACKNOWLEDGEMENTS We would like to thank Professor Nikhil Koratkar for his help, guidance, and recommendations, both with the technical and aesthetic aspects of this proposal. 22ND ANNUAL AHS INTERNATIONAL STUDENT DESIGN COMPETITION UNDERGRADUATE CATEGORY Robin Chin Raisul Haque Rafael Irizarry Heather Maffei Trevor Tersmette 2 TABLE OF CONTENTS Executive Summary.................................................................................................................................. 4 1. Introduction........................................................................................................................................... 9 2. Design Philosophy.............................................................................................................................. 10 2.1 Mission Requirements .................................................................................................................. 11 2.2 Aircraft Configuration Trade Study.............................................................................................. 11 2.2.1 Tandem Design Evaluation.................................................................................................... 12 2.2.2 Tilt-Rotor Design Evaluation ................................................................................................ 15 2.2.3 Tri-Rotor Design Evaluation ................................................................................................ -

As365 N3 Cmj
BBase_Dauphin.aiase_Dauphin.ai 006/03/20066/03/2006 110:40:290:40:29 C M J CM EUROCOPTER MJ CJ AS365 N3 CMJ N Technical Data 365 N3 06.101.02 E Eurocopter reserves the right to make configuration and data changes at any time without notice. The facts and figures contained in this document and expressed in good faith do not constitute any offer or contract with Eurocopter Technical Data Contents 1 – Foreword ................................................................................................... 3 2 - General characteristics ............................................................................ 4 3 - Standard Aircraft Definition .................................................................... 12 4 - Optional equipment ................................................................................. 14 5 - Table of Constraints ................................................................................ 21 6 - Main performance .................................................................................... 35 Manufacturers notice Attention ! EUROCOPTER, its logo, AS365 N3, DAUPHIN, FENESTRON, STARFLEX, are trade marks of the Eurocopter group. Eurocopter’s policy is one of on-going product enhancement which means that alterations in definition, pictures, weights, dimensions or performance may be made at any time without notice being included in those documents that have already been issued. This document cannot thus be taken as an offer or serve as an appendix to a contract without a prior check as to its validity -

Helicopter Slip Rings
Helicopter Slip Rings Helicopter Slip Rings Proven reliability in the most demanding of applications and environments Description Today’s rotorcraft applications place unique demands on slip ring technology because of equipment requirements and environmental conditions. From de-ice applications (with their need for high rotational speed, exposure to weather conditions and high vibration) to weapon stations and electro-optic sensor systems (with high bandwidth signal transmission), helicopter slip rings must perform in a highly reliable mode with the latest product advancements. Typical Applications Our many years of experience in this arena has allowed Moog to be a • Blade de-ice leader in slip ring technology for rotorcraft applications. Employing a • Blade position combination of precious metal fiber and composite brush technology • Tip lights for signal and power transfer, we are qualified to meet the most • Flight controls demanding applications effectively and economically. Contact us with • FLIR systems your requirements so we can help you find a solution. • Target acquisition systems • Weapon stations Features • Multiple contact technologies suited for the application - Monofilament wire brush - Multiple precious metal fiber brush - Composite brush • Environmental sealing • EMI Shielding • FEA structure analysis • High shock and vibration capabilities • Wide operating temperature envelope • Vertical integration of position sensors and ancillary products • High frequency bandwidth • High reliability and life • Redundant bearing designs 146 Moog • www.moog.com Helicopter Slip Rings HELICOPTER SLIP RING DESIGN CRITERIA Electrical slip rings are used in helicopter, tilt- design criteria: demanding, particularly with the advent of rotor and rotorcraft applications for a variety tiltrotor aircraft, electro-optics and target of applications. Historically, slip rings were • Use of existing designs acquisition systems. -

Report on Accident to Pawan Hans Ltd. Dauphin AS 365 N3 Helicopter
FINAL INVESTIGATION REPORT OF ACCIDENT TO PAWAN HANS LTD. DAUPHIN AS 365 N3 HELICOPTER VT-PHZ AT HARSIL HELIPAD UTTRAKHAND ON 28/06/2013. 1. Helicopter Type : Dauphin AS 365 N3 Nationality : INDIAN Registration : VT - PHZ 2. Owner/ Operator : Pawan Hans Ltd. 3. Pilot – in –Command : Holder of ATPL (H) Extent of injuries : Nil 4. Co-Pilot : Flying Under Rule 160 Extent of injuries : Nil 5. Place of Accident : Harsil Helipad, Uttarakhand 6. Co-ordinates of Accident Site : 31o2’18.26’’ N 78o44’26.03’’ E 7. Last point of Departure : Matli Helipad, Uttarakhand 8. Intended place of Landing : Harsil Helipad, Uttarakhand 9. Date & Time of Accident : 28th June, 2013; 05:25 UTC (Approx.) 10. Passengers on Board : 01 Extent of Injuries : NIL 11. Phase of Operation : Landing 12. Type of Accident : Crash landing (ALL TIMINGS IN THE REPORT ARE IN UTC) 1 SYNOPSIS: Pawan Hans Ltd. (PHL) Dauphin AS 365 N3 Helicopter VT-PHZ, was engaged in services with state Government of Uttrakhand to carry out rescue of devotees and local people from the area affected by flash floods. On 28/06/2013, PHL Helicopter VT-PHZ was positioned by the State Government to carry out rescue operation and evacuate people from Harsil Army Helipad located at 8200 feet. The helicopter was under the command of ATPL (H) holder on type with co-pilot (flying under Rule 160) and one passenger on board. Prior to this flight, the helicopter had landed twice at the Harsil helipad safely on same day. However, Pilot-in Command (PIC), carried out third landing at Harsil helipad under strong tail wind conditions. -

Soviet Heavy Lift Helicopters the Payload Bay of the Mi-6 Was Massive by Period Or a Captive Cargo Platform
Soviet heavy lift milestones MILE STONES helicopters Dr Carlo Kopp Russian industry remains a world class manufacturer of heavy lift helicopters, continuing to produce designs that are the most used operationally. Less appreciated in the West is the heritage of these designs dating back to the 1950s when Soviet industry poured intellectual and material resources into heavy lift design, development and manufacture. Soviet interest in rotary wing aircraft was a natural byproduct of the enormous doctrinal weight of manoeuvre warfare philosophy in the Red Army, and a propensity to emulate German designs, but do better if achievable. That led to the ubiquitous Avtomat Kalashnikova, starting from Hugo Schmeisser’s MP43/StG.44 series, and is a pattern repeated through the 1950s. Initially, Germany led in high payload rotary wing design, with the Focke-Achgelis FA-223 Drache side-by-side twin-rotor design. Built in small numbers and trialled operationally in 1945 the FA-223 could lift a tonne of payload on a sling, powered by a 1,000 SHP class radial piston engine. The first operational use of helicopters was in Burma, with the well publicised combat rescue operations commencing in April 1944, using early Sikorsky R-4 Hoverfly aircraft, later supplemented by R-6 aircraft. The Mi-6 was the first mass production heavy lift helicopter. With around 2/3 of the payload The Red Army regarded tactical aviation as capability of the C-130, it was a major asset for the Red Army. subordinate to the land army, so it took an While the Mil bureau invested its efforts in immediate interest in the helicopter, which was conventional tail rotor designs, following the US appealing as the replacement for numerous light and British lead, the Kamov bureau developed observation and liaison aircraft – the ubiquitous a series of coaxial rotor designs, a technology Polikarpov Po-2 biplane having been built in large which remains almost unique to Soviet/Russian numbers for this purpose. -

Aerodynamic Concept of the Uav in the Gyrodyne Configuration
TRANSACTIONS OF THE INSTITUTE OF AVIATION 1 (250) 2018, pp. 49–66 DOI: 10.2478/tar-2018-0005 © Copyright by Wydawnictwa Naukowe Instytutu Lotnictwa AERODYNAMIC CONCEPT OF THE UAV IN THE GYRODYNE CONFIGURATION Jan Muchowski*, Marek Szumski*, Andrzej Krzysiak** *Department of Fluid Mechanics and Aerodynamics, Mechanical Engineering and Aeronautics, Rzeszow University of Technology, al. Powstańców Warszawy 8, 35-959 Rzeszow **Aerodynamics Department, Institute of Aviation, Al. Krakowska 110/114, 02-256 Warsaw [email protected], [email protected], [email protected], Abstract The article presents an aerodynamic concept of UAV in the gyrodyne configuration, as a more efficient one than the currently used UAV airframe configuration applied for monitoring tasks of pow- er lines and railway infrastructure. A sample task which is realised by conceptual gyrodyne based on monitoring aerial power lines was characterised and described . The assumed idea of UAV was shown in comparison to the currently used aircraft configuration presented in the introduction. Referring to momentum theory, hover efficiency of the multicopter and the helicopter was evaluated. In relation to the helicopter, an initial draft of the airframe conception accompanied by a description of advan- tages of the gyrodyne configuration was exposed. Problems related to the gyrodyne configuration were emphasised in the summary. Keywords: aerodynamic concept, UAV, VTOL, gyrodyne, airframe configuration 1. INTRODUCTION In recent years a dynamic growth of the UAV (Unmanned Aerial Vehicle) usage in civil and mili- tary missions can be observed . Economic aspects are the main reasons of that increase, i.e. the purchas- ing cost of the UAS (Unmanned Aircraft System) varies from 40% up to 80% of the manned system cost. -

Helicopter Tail Rotor Orthogonal Blade Vortex Interaction F.N. Cotona,∗, J.S. Marshallb, R.A.Mcd. Galbraitha, R.B. Greena Adep
Helicopter Tail Rotor Orthogonal Blade Vortex Interaction F.N. Cotona,∗, J.S. Marshallb, R.A.McD. Galbraitha, R.B. Greena aDepartment of Aerospace Engineering, University of Glasgow, Glasgow, G12 8QQ, U.K. bDepartment of Mechanical and Industrial Engineering and IIHR – Hydroscience and Engineering, The University of Iowa, Iowa City, IA 52242, U.S. Abstract The aerodynamic operating environment of the helicopter is particularly complex and, to some extent, dominated by the vortices trailed from the main and tail rotors. These vortices not only determine the form of the induced flow field but also interact with each other and with elements of the physical structure of the flight vehicle. Such interactions can have implications in terms of structural vibration, noise generation and flight performance. In this paper, the interaction of main rotor vortices with the helicopter tail rotor is considered and, in particular, the limiting case of the orthogonal interaction. The significance of the topic is introduced by highlighting the operational issues for helicopters arising from tail rotor interactions. The basic phenomenon is then described before experimental studies of the interaction are presented. Progress in numerical modelling is then considered and, finally, the prospects for future research in the area are discussed. ∗ Corresponding Author. Tel.: +44 141 330 4305, Fax.: +44 141 330 5560, E-Mail.: [email protected] 1. INTRODUCTION.............................................................................................................................. -
Rotorcraft Performance Model (RPM) for Use in AEDT
Rotorcraft Performance Model (RPM) for use in AEDT November 2015 DOT- VNTSC-FAA-16-03 Prepared for: Office of Environment and Energy Federal Aviation Administration U.S. Department of Transportation Notice This document is disseminated under the sponsorship of the U.S. Department of Transportation in the interest of information exchange. The U.S. Government assumes no liability for use of the information contained in this document. This report does not constitute a standard, specification, or regulation. The United States Government does not endorse products or manufacturers. Trademarks or manufacturers’ names appear herein only because they are considered essential to the objective of this document. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED November 2015 Final Report 4. TITLE AND SUBTITLE 5a. FUNDING NUMBERS Rotorcraft Performance Model (RPM) for use in AEDT FA5JC6/PJ1C1 6. AUTHOR(S) 5b. CONTRACT NUMBER David A. Senzig, Eric R. Boeker 8. -

Helicopter Society (AHS) International STEM Committee: Free to Distribute with Attribution History of Rotorcraft
History and Overview of Rotating Wing Aircraft Photo by Paolo Rosa Produced by the American Helicopter Society (AHS) International STEM Committee: www.vtol.org/stem Free to distribute with attribution History of Rotorcraft • Definition of Rotorcraft – Any flying machine using rotating wings to provide lift, propulsion, and control that enable vertical flight and hover Rotating wings provide propulsion, Rotating wings provide lift, but negligible lift and control. propulsion, control at same time. History of Rotorcraft • Two key configurations developed in parallel – Autogiro • Close to helicopter, uses many of same mechanical feature • Cannot hover • Unpowered rotor – Helicopter • Powered rotor • Many configurations have been developed • Autogiros flew first! – Autogiro innovations enabled development of first helicopters Autogyro – How it Works Lift Unpowered Rotor that Spins Due to Wind Blowing Through Rotor Like a Wind Turbine Relative Wind No Need for Anti-Torque Since Not Driven Thrust By an Engine Fixed to the Fuselage Control Surfaces Autogyro – How it Works Kind of like parasailing, except rotor provides lift in addition to drag. Helicopter – How it Works • Powered Rotor • Equal and opposite torque applied to rotor acts on fuselage Tail Rotor Rotor Thrust Thrust Main Rotor Drive Shaft Tail Boom Cockpit Tail Rotor Engine, Fuel, Landing Skids Transmission, etc. Controls Helicopter – Need for Anti-Torque • Engine fixed on body – exerts torque on rotor shaft – Rotor shaft exerts equal and opposite torque on body • Many configurations