Rotorcraft Performance Model (RPM) for Use in AEDT
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Loss of Control in Yaw During Take-Off, Collision with the Ground, in Sightseeing Flight
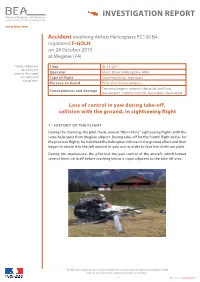
INVESTIGATION REPORT www.bea.aero Accident involving Airbus Helicopters EC130 B4 registered F-GOLH on 24 October 2015 at Megève (74) (1)Unless otherwise Time At 11:45(1) specified, the times in this report Operator Mont-Blanc Hélicoptère MBH are expressed Type of flight Commercial air transport in local time. Persons on board Pilot and six passengers Two passengers injured, the pilot and four Consequences and damage passengers slightly injured, helicopter destroyed Loss of control in yaw during take-off, collision with the ground, in sightseeing flight 1 - HISTORY OF THE FLIGHT During the morning, the pilot made several “Mont Blanc” sightseeing flights with the same helicopter from Megève altiport. During take-off for the fourth flight and as for the previous flights, he stabilized the helicopter in hover in the ground effect and then began to rotate it to the left around its yaw axis in order to face the climb-out path. During this manoeuvre, the pilot lost the yaw control of the aircraft, which turned several times on itself before crashing below a slope adjacent to the take-off area. The BEA investigations are conducted with the sole objective of improving aviation safety and are not intended to apportion blame or liabilities. 1/9 BEA-0647.en/January 2018 2 - ADDITIONAL INFORMATION 2.1 Examination of the accident site and wreckage The wreckage is located 25 meters to the north-north/west below the take-off area. Observations indicate that the engine was providing power and that the rotor struck the ground with energy. The cyclic pitch and collective pitch controls are continuous. -

United Nations Peacekeeping Missions Military Aviation Unit Manual Second Edition April 2021
UN Military Aviation Unit Manual United Nations Peacekeeping Missions Military Aviation Unit Manual Second Edition April 2021 Second Edition 2019 DEPARTMENT OF PEACE OPERATIONS DEPARTMENT OF OPERATIONAL SUPPORT UN Military Aviation Unit Manual Produced by: Office of Military Affairs, Department of Peace Operations UN Secretariat One UN Plaza, New York, NY 10017 Tel. 917-367-2487 Approved by: Jean-Pierre Lacroix, Under-Secretary-General for Peace Operations Department of Peace Operations (DPO). Atul Khare Under-Secretary-General for Operational Support Department of Operational Support (DOS) April 2021. Contact: PDT/OMA/DPO Review date: 30/ 04 / 2026 Reference number: 2021.04 Printed at the UN, New York © UN 2021. This publication enjoys copyright under Protocol 2 of the Universal Copyright Convention. Nevertheless, governmental authorities or Member States may freely photocopy any part of this publication for exclusive use within their training institutes. However, no portion of this publication may be reproduced for sale or mass publication without the express consent, in writing, of the Office of Military Affairs, UN Department of Peace Operations. ii UN Military Aviation Unit Manual Foreword We are delighted to introduce the United Nations Peacekeeping Missions Military Aviation Unit Manual, an essential guide for commanders and staff deployed in peacekeeping operations, and an important reference for Member States and the staff at United Nations Headquarters. For several decades, United Nations peacekeeping has evolved significantly in its complexity. The spectrum of multi-dimensional UN peacekeeping operations includes challenging tasks such as restoring state authority, protecting civilians and disarming, demobilizing and reintegrating ex-combatants. In today’s context, peacekeeping missions are deploying into environments where they can expect to confront asymmetric threats and contend with armed groups over large swaths of territory. -

Future Battlefield Rotorcraft Capability (FBRC) – Anno 2035 and Beyond
November 2018 Future Battle eld Rotorcraft Capability Anno 2035 and Beyond Joint Air Power Competence Centre Cover picture © Airbus © This work is copyrighted. No part may be reproduced by any process without prior written permission. Inquiries should be made to: The Editor, Joint Air Power Competence Centre (JAPCC), [email protected] Disclaimer This document is a product of the Joint Air Power Competence Centre (JAPCC). It does not represent the opinions or policies of the North Atlantic Treaty Organization (NATO) and is designed to provide an independent overview, analysis and food for thought regarding possible ways ahead on this subject. Comments and queries on this document should be directed to the Air Operations Support Branch, JAPCC, von-Seydlitz-Kaserne, Römerstraße 140, D-47546 Kalkar. Please visit our website www.japcc.org for the latest information on JAPCC, or e-mail us at [email protected]. Author Cdr Maurizio Modesto (ITA Navy) Release This paper is releasable to the Public. Portions of the document may be quoted without permission, provided a standard source credit is included. Published and distributed by The Joint Air Power Competence Centre von-Seydlitz-Kaserne Römerstraße 140 47546 Kalkar Germany Telephone: +49 (0) 2824 90 2201 Facsimile: +49 (0) 2824 90 2208 E-Mail: [email protected] Website: www.japcc.org Denotes images digitally manipulated JAPCC |Future BattlefieldRotorcraft Capability and – AnnoBeyond 2035 | November 2018 Executive Director, JAPCC Director, Executive DEUAF General, Lieutenant Klaus Habersetzer port Branchviae-mail [email protected]. AirOperationsSup contact to theJAPCC’s free feel thisdocument.Please to withregard have you may comments welcome any We thisstudy. -

NASA Mars Helicopter Team Striving for a “Kitty Hawk” Moment
NASA Mars Helicopter Team Striving for a “Kitty Hawk” Moment NASA’s next Mars exploration ground vehicle, Mars 2020 Rover, will carry along what could become the first aircraft to fly on another planet. By Richard Whittle he world altitude record for a helicopter was set on June 12, 1972, when Aérospatiale chief test pilot Jean Boulet coaxed T his company’s first SA 315 Lama to a hair-raising 12,442 m (40,820 ft) above sea level at Aérodrome d’Istres, northwest of Marseille, France. Roughly a year from now, NASA hopes to fly an electric helicopter at altitudes equivalent to two and a half times Boulet’s enduring record. But NASA’s small, unmanned machine actually will fly only about five meters above the surface where it is to take off and land — the planet Mars. Members of NASA’s Mars Helicopter team prepare the flight model (the actual vehicle going to Mars) for a test in the JPL The NASA Mars Helicopter is to make a seven-month trip to its Space Simulator on Jan. 18, 2019. (NASA photo) destination folded up and attached to the underbelly of the Mars 2020 Rover, “Perseverance,” a 10-foot-long (3 m), 9-foot-wide (2.7 The atmosphere of Mars — 95% carbon dioxide — is about one m), 7-foot-tall (2.13 m), 2,260-lb (1,025-kg) ground exploration percent as dense as the atmosphere of Earth. That makes flying at vehicle. The Rover is scheduled for launch from Cape Canaveral five meters on Mars “equal to about 100,000 feet [30,480 m] above this July on a United Launch Alliance Atlas V rocket and targeted sea level here on Earth,” noted Balaram. -
Design, Modelling and Control of a Space UAV for Mars Exploration
Design, Modelling and Control of a Space UAV for Mars Exploration Akash Patel Space Engineering, master's level (120 credits) 2021 Luleå University of Technology Department of Computer Science, Electrical and Space Engineering Design, Modelling and Control of a Space UAV for Mars Exploration Akash Patel Department of Computer Science, Electrical and Space Engineering Faculty of Space Science and Technology Luleå University of Technology Submitted in partial satisfaction of the requirements for the Degree of Masters in Space Science and Technology Supervisor Dr George Nikolakopoulos January 2021 Acknowledgements I would like to take this opportunity to thank my thesis supervisor Dr. George Nikolakopoulos who has laid a concrete foundation for me to learn and apply the concepts of robotics and automation for this project. I would be forever grateful to George Nikolakopoulos for believing in me and for supporting me in making this master thesis a success through tough times. I am thankful to him for putting me in loop with different personnel from the robotics group of LTU to get guidance on various topics. I would like to thank Christoforos Kanellakis for guiding me in the control part of this thesis. I would also like to thank Björn Lindquist for providing me with additional research material and for explaining low level and high level controllers for UAV. I am grateful to have been a part of the robotics group at Luleå University of Technology and I thank the members of the robotics group for their time, support and considerations for my master thesis. I would also like to thank Professor Lars-Göran Westerberg from LTU for his guidance in develop- ment of fluid simulations for this master thesis project. -

Real-Time Helicopter Flight Control: Modelling and Control by Linearization and Neural Networks
Purdue University Purdue e-Pubs Department of Electrical and Computer Department of Electrical and Computer Engineering Technical Reports Engineering August 1991 Real-Time Helicopter Flight Control: Modelling and Control by Linearization and Neural Networks Tobias J. Pallett Purdue University School of Electrical Engineering Shaheen Ahmad Purdue University School of Electrical Engineering Follow this and additional works at: https://docs.lib.purdue.edu/ecetr Pallett, Tobias J. and Ahmad, Shaheen, "Real-Time Helicopter Flight Control: Modelling and Control by Linearization and Neural Networks" (1991). Department of Electrical and Computer Engineering Technical Reports. Paper 317. https://docs.lib.purdue.edu/ecetr/317 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. Real-Time Helicopter Flight Control: Modelling and Control by Linearization and Neural Networks Tobias J. Pallett Shaheen Ahmad TR-EE 91-35 August 1991 Real-Time Helicopter Flight Control: Modelling and Control by Lineal-ization and Neural Networks Tobias J. Pallett and Shaheen Ahmad Real-Time Robot Control Laboratory, School of Electrical Engineering, Purdue University West Lafayette, IN 47907 USA ABSTRACT In this report we determine the dynamic model of a miniature helicopter in hovering flight. Identification procedures for the nonlinear terms are also described. The model is then used to design several linearized control laws and a neural network controller. The controllers were then flight tested on a miniature helicopter flight control test bed the details of which are also presented in this report. Experimental performance of the linearized and neural network controllers are discussed. -
National Rappel Operations Guide
National Rappel Operations Guide 2019 NATIONAL RAPPEL OPERATIONS GUIDE USDA FOREST SERVICE National Rappel Operations Guide i Page Intentionally Left Blank National Rappel Operations Guide ii Table of Contents Table of Contents ..........................................................................................................................ii USDA Forest Service - National Rappel Operations Guide Approval .............................................. iv USDA Forest Service - National Rappel Operations Guide Overview ............................................... vi USDA Forest Service Helicopter Rappel Mission Statement ........................................................ viii NROG Revision Summary ............................................................................................................... x Introduction ...................................................................................................... 1—1 Administration .................................................................................................. 2—1 Rappel Position Standards ................................................................................. 2—6 Rappel and Cargo Letdown Equipment .............................................................. 4—1 Rappel and Cargo Letdown Operations .............................................................. 5—1 Rappel and Cargo Operations Emergency Procedures ........................................ 6—1 Documentation ................................................................................................ -

Adventures in Low Disk Loading VTOL Design
NASA/TP—2018–219981 Adventures in Low Disk Loading VTOL Design Mike Scully Ames Research Center Moffett Field, California Click here: Press F1 key (Windows) or Help key (Mac) for help September 2018 This page is required and contains approved text that cannot be changed. NASA STI Program ... in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. to the advancement of aeronautics and space Collected papers from scientific and science. The NASA scientific and technical technical conferences, symposia, seminars, information (STI) program plays a key part in or other meetings sponsored or co- helping NASA maintain this important role. sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information technical, or historical information from Officer. It collects, organizes, provides for NASA programs, projects, and missions, archiving, and disseminates NASA’s STI. The often concerned with subjects having NASA STI program provides access to the NTRS substantial public interest. Registered and its public interface, the NASA Technical Reports Server, thus providing one of • TECHNICAL TRANSLATION. the largest collections of aeronautical and space English-language translations of foreign science STI in the world. Results are published in scientific and technical material pertinent to both non-NASA channels and by NASA in the NASA’s mission. NASA STI Report Series, which includes the following report types: Specialized services also include organizing and publishing research results, distributing • TECHNICAL PUBLICATION. Reports of specialized research announcements and feeds, completed research or a major significant providing information desk and personal search phase of research that present the results of support, and enabling data exchange services. -

Helicopter Physics by Harm Frederik Althuisius López
Helicopter Physics By Harm Frederik Althuisius López Lift Happens Lift Formula Torque % & Lift is a mechanical aerodynamic force produced by the Lift is calculated using the following formula: 2 = *4 '56 Torque is a measure of how much a force acting on an motion of an aircraft through the air, it generally opposes & object causes that object to rotate. As the blades of a Where * is the air density, 4 is the velocity, '5 is the lift coefficient and 6 is gravity as a means to fly. Lift is generated mainly by the the surface area of the wing. Even though most of these components are helicopter rotate against the air, the air pushes back on the rd wings due to their shape. An Airfoil is a cross-section of a relatively easy to measure, the lift coefficient is highly dependable on the blades following Newtons 3 Law of Motion: “To every wing, it is a streamlined shape that is capable of generating shape of the airfoil. Therefore it is usually calculated through the angle of action there is an equal and opposite reaction”. This significantly more lift than drag. Drag is the air resistance attack of a specific airfoil as portrayed in charts much like the following: reaction force is translated into the fuselage of the acting as a force opposing the motion of the aircraft. helicopter via torque, and can be measured for individual % & -/ 0 blades as follows: ! = #$ = '()*+ ∫ # 1# , where $ is the & -. Drag Force. As a result the fuselage tends to rotate in the Example of a Lift opposite direction of its main rotor spin. -
Micro Coaxial Helicopter Controller Design
Micro Coaxial Helicopter Controller Design A Thesis Submitted to the Faculty of Drexel University by Zelimir Husnic in partial fulfillment of the requirements for the degree of Doctor of Philosophy December 2014 c Copyright 2014 Zelimir Husnic. All Rights Reserved. ii Dedications To my parents and family. iii Acknowledgments There are many people who need to be acknowledged for their involvement in this research and their support for many years. I would like to dedicate my thankfulness to Dr. Bor-Chin Chang, without whom this work would not have started. As an excellent academic advisor, he has always been a helpful and inspiring mentor. Dr. B. C. Chang provided me with guidance and direction. Special thanks goes to Dr. Mishah Salman and Dr. Humayun Kabir for their mentorship and help. I would like to convey thanks to my entire thesis committee: Dr. Chang, Dr. Kwatny, Dr. Yousuff, Dr. Zhou and Dr. Kabir. Above all, I express my sincere thanks to my family for their unconditional love and support. iv v Table of Contents List of Tables ........................................... viii List of Figures .......................................... ix Abstract .............................................. xiii 1. Introduction .......................................... 1 1.1 Vehicles to be Discussed................................... 1 1.2 Coaxial Benefits ....................................... 2 1.3 Motivation .......................................... 3 2. Helicopter Flight Dynamics ................................ 4 2.1 Introduction ........................................ -

Helicopter Flying Handbook (FAA-H-8083-21B) Chapter 8
Chapter 8 Ground Procedures and Flight Preparations Introduction Once a pilot takes off, it is up to him or her to make sound, safe decisions throughout the flight. It is equally important for the pilot to use the same diligence when conducting a preflight inspection, making maintenance decisions, refueling, and conducting ground operations. This chapter discusses the responsibility of the pilot regarding ground safety in and around the helicopter and when preparing to fly. 8-1 Preflight There are two primary methods of deferring maintenance on rotorcraft operating under part 91. They are the deferral Before any flight, ensure the helicopter is airworthy by provision of 14 CFR part 91, section 91.213(d) and an FAA- inspecting it according to the rotorcraft flight manual (RFM), approved MEL. pilot’s operating handbook (POH), or other information supplied either by the operator or the manufacturer. The deferral provision of 14 CFR section 91.213(d) is Remember that it is the responsibility of the pilot in command widely used by most pilot/operators. Its popularity is due (PIC) to ensure the aircraft is in an airworthy condition. to simplicity and minimal paperwork. When inoperative equipment is found during preflight or prior to departure, the In preparation for flight, the use of a checklist is important decision should be to cancel the flight, obtain maintenance so that no item is overlooked. [Figure 8-1] Follow the prior to flight, determine if the flight can be made under the manufacturer’s suggested outline for both the inside and limitations imposed by the defective equipment, or to defer outside inspection. -

Paper Helicopters Preparation
Paper Helicopters Preparation CLASS LEVEL First – sixth class OBJECTIVES Content Strand and Strand Unit Energy & forces, Forces Through investigation the child should be enabled to come to appreciate that gravity is a force, SESE: Science Curriculum page 87. In this activity children explore how some things fall and how varying the size of the rotor blades, the shape of the rotor blades and the weight of a paper helicopter affect the way a helicopter spins. Skill development Through completing the strand units of the science curriculum the child should be enabled to design, plan and carry out simple experiments, having regard to one or two variables and the need to sequence tasks and tests, SESE: Science Curriculum page 79. This activity helps them understand fair testing by changing only one variable (i.e. shape only or length only) at a time. Investigating; experimenting; observing; analysing; measuring/timing; recording and communicating. CURRICULUM LINKS Mathematics Data / representing and interpreting data SESE: History Continuity and change over time/ technological and scientific developments over long periods BACKGROUND A previous activity on how things fall (i.e. the weight of the object is not a factor – Galileo and the Leaning Tower of Pisa) would help understanding of this activity, but not essential. MATERIALS/EQUIPMENT Paper, Ruler, Paper Clips, Scissors Templates of different sizes PREPARATION Test out a few thicknesses of paper/cardboard first to see that some of them spin. BACKGROUND The shape of the helicopter rotor blades make it spin INFORMATION when dropped from a height. Gravity pulls the helicopter down. The air resists the movement and pushes up each rotor separately, causing the helicopter to spin.