Houston, S. and Thomson, D. (2017) on the Modelling of Gyroplane Flight Dynamics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
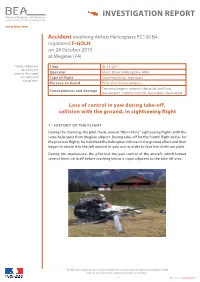
Loss of Control in Yaw During Take-Off, Collision with the Ground, in Sightseeing Flight
INVESTIGATION REPORT www.bea.aero Accident involving Airbus Helicopters EC130 B4 registered F-GOLH on 24 October 2015 at Megève (74) (1)Unless otherwise Time At 11:45(1) specified, the times in this report Operator Mont-Blanc Hélicoptère MBH are expressed Type of flight Commercial air transport in local time. Persons on board Pilot and six passengers Two passengers injured, the pilot and four Consequences and damage passengers slightly injured, helicopter destroyed Loss of control in yaw during take-off, collision with the ground, in sightseeing flight 1 - HISTORY OF THE FLIGHT During the morning, the pilot made several “Mont Blanc” sightseeing flights with the same helicopter from Megève altiport. During take-off for the fourth flight and as for the previous flights, he stabilized the helicopter in hover in the ground effect and then began to rotate it to the left around its yaw axis in order to face the climb-out path. During this manoeuvre, the pilot lost the yaw control of the aircraft, which turned several times on itself before crashing below a slope adjacent to the take-off area. The BEA investigations are conducted with the sole objective of improving aviation safety and are not intended to apportion blame or liabilities. 1/9 BEA-0647.en/January 2018 2 - ADDITIONAL INFORMATION 2.1 Examination of the accident site and wreckage The wreckage is located 25 meters to the north-north/west below the take-off area. Observations indicate that the engine was providing power and that the rotor struck the ground with energy. The cyclic pitch and collective pitch controls are continuous. -

Assessment of a Fuel Cell Powered Air Taxi in Urban Flight Conditions
Assessment of a Fuel Cell Powered Air Taxi in Urban Flight Conditions M. Husemann1, C. Glaser2, E. Stumpf3 Institute of Aerospace Systems (ILR), RWTH Aachen University, 52062 Aachen, Germany This paper presents a first estimation of potential impacts on the flight operations of small air taxis in urban areas using a fuel cell instead of a battery as an energy resource. The expanding application of electric components is seen as a possibility to reduce operating costs and environmental impacts in the form of noise and pollutant emissions due to lower consumption of fossil fuels. The majority of such designs have so far been based on the use of (not yet) sufficiently efficient batteries. Long charging times, possible overheating or a limited service life in the form of limited charging cycles pose a challenge to the development of such aircraft. Parameter studies are conducted to identify possible advantages of using a fuel cell. In particular, the range and payload capacity ist investigated and first effects on the cost structure will be presented. The evaluation of the studies shows that the use of fuel cells enables significantly longer ranges than the use of batteries. In addition, the range potential gained can be used, for example, to transport more payload over the same distance. Furthermore, the technological maturity in the form of the individual energy density and the weight of the powertrain unit has a significant effect on the cost structure. Fuel cells therefore have a high potential for applications in the mobility sector, but still require extensive research efforts. I. Introduction Increasing traffic volume due to advanced technologies and growing mobility demand often leads to heavy traffic and circumstantial routing, especially in metropolitan areas. -

Helicopter Dynamics Concerning Retreating Blade Stall on a Coaxial Helicopter
Helicopter Dynamics Concerning Retreating Blade Stall on a Coaxial Helicopter A project presented to The Faculty of the Department of Aerospace Engineering San José State University In partial fulfillment of the requirements for the degree Master of Science in Aerospace Engineering by Aaron Ford May 2019 approved by Prof. Jeanine Hunter Faculty Advisor © 2019 Aaron Ford ALL RIGHTS RESERVED ABSTRACT Helicopter Dynamics Concerning Retreating Blade Stall on a Coaxial Helicopter by Aaron Ford A model of helicopter blade flapping dynamics is created to determine the occurrence of retreating blade stall on a coaxial helicopter with pusher-propeller in straight and level flight. Equations of motion are developed, and blade element theory is utilized to evaluate the appropriate aerodynamics. Modelling of the blade flapping behavior is verified against benchmark data and then used to determine the angle of attack distribution about the rotor disk for standard helicopter configurations utilizing both hinged and hingeless rotor blades. Modelling of the coaxial configuration with the pusher-prop in straight and level flight is then considered. An approach was taken that minimizes the angle of attack and generation of lift on the advancing side while minimizing them on the retreating side of the rotor disk. The resulting asymmetric lift distribution is compensated for by using both counter-rotating rotor disks to maximize lift on their respective advancing sides and reduce drag on their respective retreating sides. The result is an elimination of retreating blade stall in the coaxial and pusher-propeller configuration. Finally, an assessment of the lift capability of the configuration at both sea level and at “high and hot” conditions were made. -

Adventures in Low Disk Loading VTOL Design
NASA/TP—2018–219981 Adventures in Low Disk Loading VTOL Design Mike Scully Ames Research Center Moffett Field, California Click here: Press F1 key (Windows) or Help key (Mac) for help September 2018 This page is required and contains approved text that cannot be changed. NASA STI Program ... in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. to the advancement of aeronautics and space Collected papers from scientific and science. The NASA scientific and technical technical conferences, symposia, seminars, information (STI) program plays a key part in or other meetings sponsored or co- helping NASA maintain this important role. sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information technical, or historical information from Officer. It collects, organizes, provides for NASA programs, projects, and missions, archiving, and disseminates NASA’s STI. The often concerned with subjects having NASA STI program provides access to the NTRS substantial public interest. Registered and its public interface, the NASA Technical Reports Server, thus providing one of • TECHNICAL TRANSLATION. the largest collections of aeronautical and space English-language translations of foreign science STI in the world. Results are published in scientific and technical material pertinent to both non-NASA channels and by NASA in the NASA’s mission. NASA STI Report Series, which includes the following report types: Specialized services also include organizing and publishing research results, distributing • TECHNICAL PUBLICATION. Reports of specialized research announcements and feeds, completed research or a major significant providing information desk and personal search phase of research that present the results of support, and enabling data exchange services. -
Micro Coaxial Helicopter Controller Design
Micro Coaxial Helicopter Controller Design A Thesis Submitted to the Faculty of Drexel University by Zelimir Husnic in partial fulfillment of the requirements for the degree of Doctor of Philosophy December 2014 c Copyright 2014 Zelimir Husnic. All Rights Reserved. ii Dedications To my parents and family. iii Acknowledgments There are many people who need to be acknowledged for their involvement in this research and their support for many years. I would like to dedicate my thankfulness to Dr. Bor-Chin Chang, without whom this work would not have started. As an excellent academic advisor, he has always been a helpful and inspiring mentor. Dr. B. C. Chang provided me with guidance and direction. Special thanks goes to Dr. Mishah Salman and Dr. Humayun Kabir for their mentorship and help. I would like to convey thanks to my entire thesis committee: Dr. Chang, Dr. Kwatny, Dr. Yousuff, Dr. Zhou and Dr. Kabir. Above all, I express my sincere thanks to my family for their unconditional love and support. iv v Table of Contents List of Tables ........................................... viii List of Figures .......................................... ix Abstract .............................................. xiii 1. Introduction .......................................... 1 1.1 Vehicles to be Discussed................................... 1 1.2 Coaxial Benefits ....................................... 2 1.3 Motivation .......................................... 3 2. Helicopter Flight Dynamics ................................ 4 2.1 Introduction ........................................ -

System of Systems Modeling for Personal Air Vehicles
9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization AIAA 2002-5620 4-6 September 2002, Atlanta, Georgia SYSTEM -OF -SYSTEMS MO DELING FOR PERSONAL AIR VEHICLES Daniel DeLaurentis, Taewoo Kang, Choongiap Lim, Dimitri Mavris, Daniel Schrage Aerospace Systems Design Laboratory (ASDL) School of Aerospace Engineering Georgia Institute of Technology, Atlanta, GA 30332 http://www.asdl.gatech.edu Abstract Introduction On -going research is described in this paper System -of -systems problems contain multiple, concerning the development of a methodology for interacting, non -homogeneous functional elements, each adaptable system studies of future transportation of which may be represented as traditional systems solutions based upon personal air vehicles. Two themselves. This collection often exists within multiple challenges in this resea rch are presented. The hierarchies and is not packaged in a physical unit. Thus, challenge of deriving requirements for revolutionary according to this preliminary definition, an aircraft is a transportation concepts is a difficult one, due to the system while a network of personal aircraft operated fact that future transportation system infrastructure collaboratively with ground systems for improved and market economics are inter -related (and transportation is a system -of -systems. In such a probl em, uncertain) parts of the eq uation. Thus, there is a need for example, there are multiple, distinct vehicle types, for a macroscopic transportation model, and such a ground and air control networks, economic drivers, etc. task is well suited for the field of techniques known The increase in complexity brought by system -of - as system dynamics. The determination and system problems challenges the current state -of -the -art in visualization of the benefits of proposed personal air conceptual design methods. -

Remote ID NPRM Maps out UAS Airspace Integration Plans by Charles Alcock
PUBLICATIONS Vol.49 | No.2 $9.00 FEBRUARY 2020 | ainonline.com « Joby Aviation’s S4 eVTOL aircraft took a leap forward in the race to launch commercial service with a January 15 announcement of $590 million in new investment from a group led by Japanese car maker Toyota. Joby says it will have the piloted S4 flying as part of the Uber Air air taxi network in early adopter cities before the end of 2023, but it will surely take far longer to get clearance for autonomous eVTOL operations. (Full story on page 8) People HAI’s new president takes the reins page 14 Safety 2019 was a bad year for Part 91 page 12 Part 135 FAA has stern words for BlackBird page 22 Remote ID NPRM maps out UAS airspace integration plans by Charles Alcock Stakeholders have until March 2 to com- in planned urban air mobility applications. Read Our SPECIAL REPORT ment on proposed rules intended to provide The final rule resulting from NPRM FAA- a framework for integrating unmanned air- 2019-100 is expected to require remote craft systems (UAS) into the U.S. National identification for the majority of UAS, with Airspace System. On New Year’s Eve, the exceptions to be made for some amateur- EFB Hardware Federal Aviation Administration (FAA) pub- built UAS, aircraft operated by the U.S. gov- When it comes to electronic flight lished its long-awaited notice of proposed ernment, and UAS weighing less than 0.55 bags, (EFBs), most attention focuses on rulemaking (NPRM) for remote identifica- pounds. -

Over Thirty Years After the Wright Brothers
ver thirty years after the Wright Brothers absolutely right in terms of a so-called “pure” helicop- attained powered, heavier-than-air, fixed-wing ter. However, the quest for speed in rotary-wing flight Oflight in the United States, Germany astounded drove designers to consider another option: the com- the world in 1936 with demonstrations of the vertical pound helicopter. flight capabilities of the side-by-side rotor Focke Fw 61, The definition of a “compound helicopter” is open to which eclipsed all previous attempts at controlled verti- debate (see sidebar). Although many contend that aug- cal flight. However, even its overall performance was mented forward propulsion is all that is necessary to modest, particularly with regards to forward speed. Even place a helicopter in the “compound” category, others after Igor Sikorsky perfected the now-classic configura- insist that it need only possess some form of augment- tion of a large single main rotor and a smaller anti- ed lift, or that it must have both. Focusing on what torque tail rotor a few years later, speed was still limited could be called “propulsive compounds,” the following in comparison to that of the helicopter’s fixed-wing pages provide a broad overview of the different helicop- brethren. Although Sikorsky’s basic design withstood ters that have been flown over the years with some sort the test of time and became the dominant helicopter of auxiliary propulsion unit: one or more propellers or configuration worldwide (approximately 95% today), jet engines. This survey also gives a brief look at the all helicopters currently in service suffer from one pri- ways in which different manufacturers have chosen to mary limitation: the inability to achieve forward speeds approach the problem of increased forward speed while much greater than 200 kt (230 mph). -

Treball Final De Grau
TREBALL FINAL DE GRAU TÍTOL DEL TFG: Air taxi transportation infrastructures in Barcelona TITULACIÓ: Grau en Enginyeria d’Aeronavegació AUTOR: Alexandru Nicorici Ionut DIRECTOR: José Antonio Castán Ponz DATA: 19 de juny del 2020 Títol: Air taxi transportation infrastructures in Barcelona Autor: Alexandru Nicorici Ionut Director: José Antonio Castán Ponz Data: 19 de juny del 2020 Resum El següent projecte parteix de la visió d’un futur on la mobilitat urbana es reparteix també al medi aèri. A partir d’aquesta premissa, s’escull el dron de passatgers com a mitjà de transport i es busca adaptar tot un sistema infrastructural per al vehicle autònom dins el perímetre d’una ciutat, Barcelona. En un inici, la primera pregunta a respondre és: permet la normativa actual l’ús de drons de passatgers autònoms en zones urbanes? Tant les regulacions europees com les nacionals espanyoles han estat estudiades i resumides per determinar que sí es permeten operacions amb aquest tipus de vehicles i es preveu la seva integració dintre de l’aviació civil. Seguidament, un estudi de mercat de taxi drons és realitzat amb l’objectiu d’esbrinar si la tecnologia d’avui dia permet operar a paràmetres òptims i oferir el servei de taxi d’una manera completament segura i satisfactòria per al client. Prototips en fase de test i actualment funcionals han estat analitzats; per finalment, elegir un d’aquest últims com a candidat apte per al transport de persones dins la capital catalana. Un cop es té el vehicle de transport, cal mirar si la pròpia ciutat ofereix garanties d’èxit per aquest servei de transport aeri. -

Technical University of Munich Professorship for Modeling Spatial Mobility
Technical University of Munich Professorship for Modeling Spatial Mobility ENVIRONMENTAL EVALUATION OF URBAN AIR MOBILITY OPERATION Author: ALONA PUKHOVA Supervised by: Prof. Dr.-Ing. Rolf Moeckel (TUM) M. Sc. Raoul Rothfeld (Bauhaus Luftfahrt e.V.) 24.04.2019 Contents Abstract iv Acknowledgements v Acronym List vi 1 Introduction 1 1.1 Urban Air Mobility . 1 1.2 Advent of electric mobility and current state of the technology . 2 1.3 The impact of transportation on environment . 6 1.4 Research questions . 8 2 Literature Review 9 2.1 Emission modelling tools, emission factor . 9 2.2 Environmental evaluation of conventional transportation . 11 2.3 Effect of electrification in transportation on the environment . 13 2.3.1 Conventional and electric cars . 13 2.3.2 Electric Buses . 16 2.3.3 Electric bikes and scooters . 17 2.4 Air vehicle types and characteristics . 19 2.5 Source and composition of electricity . 26 i 3 Methodology 30 3.1 MATSim and UAM Extension . 30 3.2 Munich City Scenario . 31 3.2.1 Status quo (baseline) . 33 3.2.2 UAM integration . 33 3.3 Emission Calculation . 35 3.3.1 Electricity Mix . 37 3.3.2 Air Vehicle . 39 3.3.3 Conventional and electric cars . 41 3.3.4 Bus . 42 3.3.5 Tram . 44 3.3.6 U-Bahn (Underground Train) . 45 3.3.7 Sub-Urban and Regional Trains . 46 4 Results 49 4.1 Baseline Scenario . 49 4.2 Urban Air Vehicle . 51 4.3 UAM Scenario . 55 4.4 Comparison of BaU and UAM Scenarios . -
Development of a Helicopter Vortex Ring State Warning System Through a Moving Map Display Computer
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1999-09 Development of a helicopter vortex ring state warning system through a moving map display computer Varnes, David J. Monterey, California. Naval Postgraduate School http://hdl.handle.net/10945/26475 DUDLEY KNOX LIBRARY NAVAL POSTGRADUATE SCHOOL MONTEREY CA 93943-5101 NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS DEVELOPMENT OF A HELICOPTER VORTEX RING STATE WARNING SYSTEM THROUGH A MOVING MAP DISPLAY COMPUTER by David J. Varnes September 1999 Thesis Advisor: Russell W. Duren Approved for public release; distribution is unlimited. Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington. VA 22202-4302, and to the Office of Management and Budget. Paperwork Reduction Project (0704-0188) Washington DC 20503. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED 1. agency use only (Leave blank) September 1999 Master's Thesis 4. TITLE AND SUBTITLE 5. FUNDING NUMBERS DEVELOPMENT OF A HELICOPTER VORTEX RING STATE WARNING SYSTEM THROUGH A MOVING MAP DISPLAY COMPUTER 6. AUTHOR(S) Varnes, David, J. 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES) PERFORMING ORGANIZATION Naval Postgraduate School REPORT NUMBER Monterey, CA 93943-5000 10. -

WYVER Heavy Lift VTOL Aircraft
WYVER Heavy Lift VTOL Aircraft Rensselaer Polytechnic Institute 1st June, 2005 1 ACKNOWLEDGEMENTS We would like to thank Professor Nikhil Koratkar for his help, guidance, and recommendations, both with the technical and aesthetic aspects of this proposal. 22ND ANNUAL AHS INTERNATIONAL STUDENT DESIGN COMPETITION UNDERGRADUATE CATEGORY Robin Chin Raisul Haque Rafael Irizarry Heather Maffei Trevor Tersmette 2 TABLE OF CONTENTS Executive Summary.................................................................................................................................. 4 1. Introduction........................................................................................................................................... 9 2. Design Philosophy.............................................................................................................................. 10 2.1 Mission Requirements .................................................................................................................. 11 2.2 Aircraft Configuration Trade Study.............................................................................................. 11 2.2.1 Tandem Design Evaluation.................................................................................................... 12 2.2.2 Tilt-Rotor Design Evaluation ................................................................................................ 15 2.2.3 Tri-Rotor Design Evaluation ................................................................................................