Chapter 3 Helicopter Flight Controls Introduction There Are Three Major Controls in a Helicopter That the Pilot Must Use During Flight
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
MANUAL REVISION TRANSMITTAL Manual 146 (61-00-46) Propeller Owner's Manual and Logbook
HARTZELL PROPELLER INC. One Propeller Place Piqua, Ohio 45356-2634 U.S.A. Telephone: 937.778.4200 Fax: 937.778.4391 MANUAL REVISION TRANSMITTAL Manual 146 (61-00-46) Propeller Owner's Manual and Logbook REVISION 3 dated June 2012 Attached is a copy of Revision 3 to Hartzell Propeller Inc. Manual 146. Page Control Chart for Revision 3: Remove Insert Page No. Page No. COVER AND INSIDE COVER COVER AND INSIDE COVER REVISION HIGHLIGHTS REVISION HIGHLIGHTS pages 5 and 6 pages 5 and 6 SERVICE DOCUMENTS LIST SERVICE DOCUMENTS LIST pages 11 and 12 pages 11 and 12 LIST OF EFFECTIVE PAGES LIST OF EFFECTIVE PAGES pages 15 and 16 pages 15 and 16 TABLE OF CONTENTS TABLE OF CONTENTS pages 17 thru 24 pages 17 thru 26 INTRODUCTION INTRODUCTION pages 1-1 thru 1-14 pages 1-1 thru 1-16 DESCRIPTION AND DESCRIPTION AND OPERATION OPERATION pages 2-1 thru 2-20 pages 2-1 thru 2-24 INSTALLATION AND INSTALLATION AND REMOVAL REMOVAL pages 3-1 thru 3-22 pages 3-1 thru 3-24 TESTING AND TESTING AND TROUBLESHOOTING TROUBLESHOOTING pages 4-1 thru 4-10 pages 4-1 thru 4-10 continued on next page Page Control Chart for Revision 3 (continued): Remove Insert Page No. Page No. INSPECTION AND INSPECTION AND CHECK CHECK pages 5-1 thru 5-24 pages 5-1 thru 5-26 MAINTENANCE MAINTENANCE PRACTICES PRACTICES pages 6-1 thru 6-36 pages 6-1 thru 6-38 DE-ICE SYSTEMS DE-ICE SYSTEMS pages 7-1 thru 7-6 pages 7-1 thru 7-6 NOTE 1: When the manual revision has been inserted in the manual, record the information required on the Record of Revisions page in this manual. -
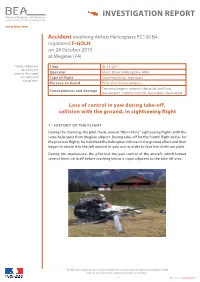
Loss of Control in Yaw During Take-Off, Collision with the Ground, in Sightseeing Flight
INVESTIGATION REPORT www.bea.aero Accident involving Airbus Helicopters EC130 B4 registered F-GOLH on 24 October 2015 at Megève (74) (1)Unless otherwise Time At 11:45(1) specified, the times in this report Operator Mont-Blanc Hélicoptère MBH are expressed Type of flight Commercial air transport in local time. Persons on board Pilot and six passengers Two passengers injured, the pilot and four Consequences and damage passengers slightly injured, helicopter destroyed Loss of control in yaw during take-off, collision with the ground, in sightseeing flight 1 - HISTORY OF THE FLIGHT During the morning, the pilot made several “Mont Blanc” sightseeing flights with the same helicopter from Megève altiport. During take-off for the fourth flight and as for the previous flights, he stabilized the helicopter in hover in the ground effect and then began to rotate it to the left around its yaw axis in order to face the climb-out path. During this manoeuvre, the pilot lost the yaw control of the aircraft, which turned several times on itself before crashing below a slope adjacent to the take-off area. The BEA investigations are conducted with the sole objective of improving aviation safety and are not intended to apportion blame or liabilities. 1/9 BEA-0647.en/January 2018 2 - ADDITIONAL INFORMATION 2.1 Examination of the accident site and wreckage The wreckage is located 25 meters to the north-north/west below the take-off area. Observations indicate that the engine was providing power and that the rotor struck the ground with energy. The cyclic pitch and collective pitch controls are continuous. -
Propeller Operation and Malfunctions Basic Familiarization for Flight Crews
PROPELLER OPERATION AND MALFUNCTIONS BASIC FAMILIARIZATION FOR FLIGHT CREWS INTRODUCTION The following is basic material to help pilots understand how the propellers on turbine engines work, and how they sometimes fail. Some of these failures and malfunctions cannot be duplicated well in the simulator, which can cause recognition difficulties when they happen in actual operation. This text is not meant to replace other instructional texts. However, completion of the material can provide pilots with additional understanding of turbopropeller operation and the handling of malfunctions. GENERAL PROPELLER PRINCIPLES Propeller and engine system designs vary widely. They range from wood propellers on reciprocating engines to fully reversing and feathering constant- speed propellers on turbine engines. Each of these propulsion systems has the similar basic function of producing thrust to propel the airplane, but with different control and operational requirements. Since the full range of combinations is too broad to cover fully in this summary, it will focus on a typical system for transport category airplanes - the constant speed, feathering and reversing propellers on turbine engines. Major propeller components The propeller consists of several blades held in place by a central hub. The propeller hub holds the blades in place and is connected to the engine through a propeller drive shaft and a gearbox. There is also a control system for the propeller, which will be discussed later. Modern propellers on large turboprop airplanes typically have 4 to 6 blades. Other components typically include: The spinner, which creates aerodynamic streamlining over the propeller hub. The bulkhead, which allows the spinner to be attached to the rest of the propeller. -

Adventures in Low Disk Loading VTOL Design
NASA/TP—2018–219981 Adventures in Low Disk Loading VTOL Design Mike Scully Ames Research Center Moffett Field, California Click here: Press F1 key (Windows) or Help key (Mac) for help September 2018 This page is required and contains approved text that cannot be changed. NASA STI Program ... in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. to the advancement of aeronautics and space Collected papers from scientific and science. The NASA scientific and technical technical conferences, symposia, seminars, information (STI) program plays a key part in or other meetings sponsored or co- helping NASA maintain this important role. sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information technical, or historical information from Officer. It collects, organizes, provides for NASA programs, projects, and missions, archiving, and disseminates NASA’s STI. The often concerned with subjects having NASA STI program provides access to the NTRS substantial public interest. Registered and its public interface, the NASA Technical Reports Server, thus providing one of • TECHNICAL TRANSLATION. the largest collections of aeronautical and space English-language translations of foreign science STI in the world. Results are published in scientific and technical material pertinent to both non-NASA channels and by NASA in the NASA’s mission. NASA STI Report Series, which includes the following report types: Specialized services also include organizing and publishing research results, distributing • TECHNICAL PUBLICATION. Reports of specialized research announcements and feeds, completed research or a major significant providing information desk and personal search phase of research that present the results of support, and enabling data exchange services. -

Aircraft Service Manual
Propeller Technical Manual Jabiru Aircraft Pty Ltd JPM0001-1 4A482U0D And 4A484E0D Propellers Propeller Technical Manual FOR 4A482U0D and 4A484E0D Propellers DOCUMENT No. JPM0001-1 DATED: 1st Feb 2013 This Manual has been prepared as a guide to correctly operate & maintain Jabiru 4A482U0D and 4A484E0D propellers. It is the owner's responsibility to regularly check the Jabiru web site at www.jabiru.net.au for applicable Service Bulletins and have them implemented as soon as possible. Manuals are also updated periodically with the latest revisions available from the web site. Failure to maintain the propeller, engine or aircraft with current service information may render the aircraft un-airworthy and void Jabiru’s Limited, Express Warranty. This document is controlled while it remains on the Jabiru server. Once this no longer applies the document becomes uncontrolled. Should you have any questions or doubts about the contents of this manual, please contact Jabiru Aircraft Pty Ltd. This document is controlled while it remains on the Jabiru server. Once this no longer applies the document becomes uncontrolled. ISSUE 1 Dated : 1st Feb 2013 Issued By: DPS Page: 1 of 32 L:\files\Manuals_For_Products\Propeller_Manuals\JPM0001-1_Prop_Manual (1).doc Propeller Technical Manual Jabiru Aircraft Pty Ltd JPM0001-1 4A482U0D And 4A484E0D Propellers 1.1 TABLE OF FIGURES ............................................................................................................................................. 3 1.2 LIST OF TABLES ................................................................................................................................................. -

Over Thirty Years After the Wright Brothers
ver thirty years after the Wright Brothers absolutely right in terms of a so-called “pure” helicop- attained powered, heavier-than-air, fixed-wing ter. However, the quest for speed in rotary-wing flight Oflight in the United States, Germany astounded drove designers to consider another option: the com- the world in 1936 with demonstrations of the vertical pound helicopter. flight capabilities of the side-by-side rotor Focke Fw 61, The definition of a “compound helicopter” is open to which eclipsed all previous attempts at controlled verti- debate (see sidebar). Although many contend that aug- cal flight. However, even its overall performance was mented forward propulsion is all that is necessary to modest, particularly with regards to forward speed. Even place a helicopter in the “compound” category, others after Igor Sikorsky perfected the now-classic configura- insist that it need only possess some form of augment- tion of a large single main rotor and a smaller anti- ed lift, or that it must have both. Focusing on what torque tail rotor a few years later, speed was still limited could be called “propulsive compounds,” the following in comparison to that of the helicopter’s fixed-wing pages provide a broad overview of the different helicop- brethren. Although Sikorsky’s basic design withstood ters that have been flown over the years with some sort the test of time and became the dominant helicopter of auxiliary propulsion unit: one or more propellers or configuration worldwide (approximately 95% today), jet engines. This survey also gives a brief look at the all helicopters currently in service suffer from one pri- ways in which different manufacturers have chosen to mary limitation: the inability to achieve forward speeds approach the problem of increased forward speed while much greater than 200 kt (230 mph). -

Helicopter Safety July-August 1991
F L I G H T S A F E T Y F O U N D A T I O N HELICOPTER SAFETY Vol. 17 No. 4 For Everyone Concerned with the Safety of Flight July/August 1991 The Philosophy and Realities of Autorotations Like the power-off glide in a fixed-wing aircraft, the autorotation in a helicopter must be used properly if it is to be a successful safety maneuver. by Michael K. Hynes Aviation Consultant In all helicopter flying, there is no single event that has a In the early years of airplane flight, the fear of engine greater impact on safety than the autorotation maneuver. failure, or that the airplane might have structural prob- The mere mention of the word “autorotation” at any lems during flight, was very strong. If either of these gathering of helicopter pilots, especially flight instruc- events took place, the pilot’s ability to get the airplane tors, will guarantee a long and lively discussion. safely on the ground quickly was important. The time it took to get the airplane on the ground was directly in There are many misconceptions about autorotations and proportion to the altitude at which the airplane was being they contribute to the accident rate when an autorotation flown. It is therefore logical that all early flights were precedes a helicopter landing accident. One approach to flown at low altitudes, often at less than 500 feet above a discussion of autorotations is to look at the subject the ground (agl). from three views: first, the philosophy of the subject; second, the reality of the circumstances that require au- At these low altitudes, the pilot did not always have the torotations; and third, the execution of the maneuver. -

DYNAMIC MODELING of AUTOROTATION for SIMULTANEOUS LIFT and WIND ENERGY EXTRACTION by SADAF MACKERTICH B.S. Rochester Institute O
DYNAMIC MODELING OF AUTOROTATION FOR SIMULTANEOUS LIFT AND WIND ENERGY EXTRACTION by SADAF MACKERTICH B.S. Rochester Institute of Technology, 2012 A thesis submitted in partial fulfilment of the requirements for the degree of Master of Science in the Department of Mechanical and Aerospace Engineering in the College of Engineering and Computer Science at the University of Central Florida Orlando, Florida Spring Term 2016 Major Professor: Tuhin Das c 2016 Sadaf Mackertich ii ABSTRACT The goal of this thesis is to develop a multi-body dynamics model of autorotation with the objective of studying its application in energy harvesting. A rotor undergoing autorotation is termed an Autogyro. In the autorotation mode, the rotor is unpowered and its interaction with the wind causes an upward thrust force. The theory of an autorotating rotorcraft was originally studied for achieving safe flight at low speeds and later used for safe descent of helicopters under engine failure. The concept can potentially be used as a means to collect high-altitude wind energy. Autorotation is inherently a dynamic process and requires detailed models for characterization. Existing models of autorotation assume steady operating conditions with constant angu- lar velocity of the rotor. The models provide spatially averaged aerodynamic forces and torques. While these steady-autorotation models are used to create a basis for the dynamic model developed in this thesis, the latter uses a Lagrangian formulation to determine the equations of motion. The aerodynamic effects on the blades that produce thrust forces, in- plane torques, and out-of-plane torques, are modeled as non-conservative forces within the Lagrangian framework. -
Development of a Helicopter Vortex Ring State Warning System Through a Moving Map Display Computer
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1999-09 Development of a helicopter vortex ring state warning system through a moving map display computer Varnes, David J. Monterey, California. Naval Postgraduate School http://hdl.handle.net/10945/26475 DUDLEY KNOX LIBRARY NAVAL POSTGRADUATE SCHOOL MONTEREY CA 93943-5101 NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS DEVELOPMENT OF A HELICOPTER VORTEX RING STATE WARNING SYSTEM THROUGH A MOVING MAP DISPLAY COMPUTER by David J. Varnes September 1999 Thesis Advisor: Russell W. Duren Approved for public release; distribution is unlimited. Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington. VA 22202-4302, and to the Office of Management and Budget. Paperwork Reduction Project (0704-0188) Washington DC 20503. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED 1. agency use only (Leave blank) September 1999 Master's Thesis 4. TITLE AND SUBTITLE 5. FUNDING NUMBERS DEVELOPMENT OF A HELICOPTER VORTEX RING STATE WARNING SYSTEM THROUGH A MOVING MAP DISPLAY COMPUTER 6. AUTHOR(S) Varnes, David, J. 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES) PERFORMING ORGANIZATION Naval Postgraduate School REPORT NUMBER Monterey, CA 93943-5000 10. -

WYVER Heavy Lift VTOL Aircraft
WYVER Heavy Lift VTOL Aircraft Rensselaer Polytechnic Institute 1st June, 2005 1 ACKNOWLEDGEMENTS We would like to thank Professor Nikhil Koratkar for his help, guidance, and recommendations, both with the technical and aesthetic aspects of this proposal. 22ND ANNUAL AHS INTERNATIONAL STUDENT DESIGN COMPETITION UNDERGRADUATE CATEGORY Robin Chin Raisul Haque Rafael Irizarry Heather Maffei Trevor Tersmette 2 TABLE OF CONTENTS Executive Summary.................................................................................................................................. 4 1. Introduction........................................................................................................................................... 9 2. Design Philosophy.............................................................................................................................. 10 2.1 Mission Requirements .................................................................................................................. 11 2.2 Aircraft Configuration Trade Study.............................................................................................. 11 2.2.1 Tandem Design Evaluation.................................................................................................... 12 2.2.2 Tilt-Rotor Design Evaluation ................................................................................................ 15 2.2.3 Tri-Rotor Design Evaluation ................................................................................................ -

Hydromatic Propeller
HYDROMATIC PROPELLER International Historic Engineering Landmark Hamilton Standard The American Society of A Division of United Technologies Mechanical Engineers Windsor Locks, Connecticut November 8, 1990 Historical Significance The text of this International Landmark Designation: The Hamilton Standard Hydromatic propeller represented INTERNATIONAL HISTORIC MECHANICAL a major advance in propeller design and laid the groundwork ENGINEERING LANDMARK for further advancements in propulsion over the next 50 years. The Hydromatic was designed to accommodate HAMILTON STANDARD larger blades for increased thrust, and provide a faster rate HYDROMATIC PROPELLER of pitch change and a wider range of pitch control. This WINDSOR LOCKS, CONNECTICUT propeller utilized high-pressure oil, applied to both sides of LATE 1930s the actuating piston, for pitch control as well as feathering — the act of stopping propeller rotation on a non-functioning The variable-pitch aircraft propeller allows the adjustment engine to reduce drag and vibration — allowing multiengined in flight of blade pitch, making optimal use of the engine’s aircraft to safely continue flight on remaining engine(s). power under varying flight conditions. On multi-engined The Hydromatic entered production in the late 1930s, just aircraft it also permits feathering the propeller--stopping its in time to meet the requirements of the high-performance rotation--of a nonfunctioning engine to reduce drag and military and transport aircraft of World War II. The vibration. propeller’s performance, durability and reliability made a The Hydromatic propeller was designed for larger blades, major contribution to the successful efforts of the U.S. and faster rate of pitch change, and wider range of pitch control Allied air forces. -

As365 N3 Cmj
BBase_Dauphin.aiase_Dauphin.ai 006/03/20066/03/2006 110:40:290:40:29 C M J CM EUROCOPTER MJ CJ AS365 N3 CMJ N Technical Data 365 N3 06.101.02 E Eurocopter reserves the right to make configuration and data changes at any time without notice. The facts and figures contained in this document and expressed in good faith do not constitute any offer or contract with Eurocopter Technical Data Contents 1 – Foreword ................................................................................................... 3 2 - General characteristics ............................................................................ 4 3 - Standard Aircraft Definition .................................................................... 12 4 - Optional equipment ................................................................................. 14 5 - Table of Constraints ................................................................................ 21 6 - Main performance .................................................................................... 35 Manufacturers notice Attention ! EUROCOPTER, its logo, AS365 N3, DAUPHIN, FENESTRON, STARFLEX, are trade marks of the Eurocopter group. Eurocopter’s policy is one of on-going product enhancement which means that alterations in definition, pictures, weights, dimensions or performance may be made at any time without notice being included in those documents that have already been issued. This document cannot thus be taken as an offer or serve as an appendix to a contract without a prior check as to its validity