Negative Resistance Oscillators
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Thyristors.Pdf
THYRISTORS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. Thyristors Thyristors are a class of semiconductor devices characterized by 4-layers of alternating p and n material. Four-layer devices act as either open or closed switches; for this reason, they are most frequently used in control applications. Some thyristors and their symbols are (a) 4-layer diode (b) SCR (c) Diac (d) Triac (e) SCS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The 4-layer diode (or Shockley diode) is a type of thyristor that acts something like an ordinary diode but conducts in the forward direction only after a certain anode to cathode voltage called the forward-breakover voltage is reached. The basic construction of a 4-layer diode and its schematic symbol are shown The 4-layer diode has two leads, labeled the anode (A) and the Anode (A) A cathode (K). p 1 n The symbol reminds you that it acts 2 p like a diode. It does not conduct 3 when it is reverse-biased. n Cathode (K) K Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The concept of 4-layer devices is usually shown as an equivalent circuit of a pnp and an npn transistor. Ideally, these devices would not conduct, but when forward biased, if there is sufficient leakage current in the upper pnp device, it can act as base current to the lower npn device causing it to conduct and bringing both transistors into saturation. -

Robust Wireless Power Transfer Using a Nonlinear Parity–Time-Symmetric Circuit Sid Assawaworrarit1, Xiaofang Yu1 & Shanhui Fan1
LETTER doi:10.1038/nature22404 Robust wireless power transfer using a nonlinear parity–time-symmetric circuit Sid Assawaworrarit1, Xiaofang Yu1 & Shanhui Fan1 Considerable progress in wireless power transfer has been made in PT-symmetric systems are invariant under the joint parity and the realm of non-radiative transfer, which employs magnetic-field time reversal operation14,15. In optical systems, where the symmetry coupling in the near field1–4. A combination of circuit resonance conditions can be met by engineering the gain/loss regions and and impedance transformation is often used to help to achieve their coupling, PT-symmetric systems have exhibited unusual efficient transfer of power over a predetermined distance of about properties16–20. A linear PT-symmetric system supports two phases, the size of the resonators3,4. The development of non-radiative depending on the magnitude of the gain/loss relative to the coupling wireless power transfer has paved the way towards real-world strength. In the unbroken or exact phase, eigenmode frequencies applications such as wireless powering of implantable medical remain real and energy is equally distributed between the gain and devices and wireless charging of stationary electric vehicles1,2,5–8. loss regions; in the broken phase, one of the eigenmodes grows expo- However, it remains a fundamental challenge to create a wireless nentially while the other decays exponentially. Recently, the concept power transfer system in which the transfer efficiency is robust of PT symmetry has been extensively explored in laser structures21–24. against the variation of operating conditions. Here we propose Theoretically, the inclusion of nonlinear gain saturation in the analysis theoretically and demonstrate experimentally that a parity–time- of a PT-symmetric system causes that system to reach a steady state symmetric circuit incorporating a nonlinear gain saturation element in a laser-like fashion that still contains the following PT symmetry provides robust wireless power transfer. -

Eimac Care and Feeding of Tubes Part 3
SECTION 3 ELECTRICAL DESIGN CONSIDERATIONS 3.1 CLASS OF OPERATION Most power grid tubes used in AF or RF amplifiers can be operated over a wide range of grid bias voltage (or in the case of grounded grid configuration, cathode bias voltage) as determined by specific performance requirements such as gain, linearity and efficiency. Changes in the bias voltage will vary the conduction angle (that being the portion of the 360° cycle of varying anode voltage during which anode current flows.) A useful system has been developed that identifies several common conditions of bias voltage (and resulting anode current conduction angle). The classifications thus assigned allow one to easily differentiate between the various operating conditions. Class A is generally considered to define a conduction angle of 360°, class B is a conduction angle of 180°, with class C less than 180° conduction angle. Class AB defines operation in the range between 180° and 360° of conduction. This class is further defined by using subscripts 1 and 2. Class AB1 has no grid current flow and class AB2 has some grid current flow during the anode conduction angle. Example Class AB2 operation - denotes an anode current conduction angle of 180° to 360° degrees and that grid current is flowing. The class of operation has nothing to do with whether a tube is grid- driven or cathode-driven. The magnitude of the grid bias voltage establishes the class of operation; the amount of drive voltage applied to the tube determines the actual conduction angle. The anode current conduction angle will determine to a great extent the overall anode efficiency. -

Shults Robert D 196308 Ms 10
AN INVESTIGATION OF THE INFLUENCE OF CIRCUIT PARAMETERS ON THE OUTPUT WAVESHAPE OF A TUNNEL DIODE OSCILLATOR A THESIS Presented to The Faculty of the Graduate Division by Robert David Shults In Partial Fulfillment of the Requirements for the Degree Master of Science in Electrical Engineering Georgia Institute of Technology June, I963 AN INVESTIGATION OF THE INFLUENCE OF CIRCUIT PARAMETERS ON THE OUTPUT WAVESHAPE OF A TUNNEL DIODE OSCILLATOR Approved: —VY -w/T //'- Dr. W. B.l/Jonesj UJr. (Chairman) _A a t~l — Dry 3* L. Hammond, Jr. V ^^ __—^ '-" ^^ *• Br> J. T. Wang * Date Approved by Chairman: //l&U (A* l/j^Z) In presenting the dissertation as a partial, fulfillment of the requirements for an advanced degree from the Georgia Institute of Technology, I agree that the Library of the Institution shall make it available for inspection and circulation in accordance witn its regulations governing materials of this type. I agree -chat permission to copy from, or to publish from, this dissertation may be granted by the professor under whose direction it was written^ or, in his absence, by the dean of the Graduate Division when luch copying or publication is solely for scholarly purposes ftad does not involve potential financial gain. It is under stood that any copying from, or publication of, this disser tation which involves potential financial gain will not be allowed without written permission. _/2^ d- ii ACKNOWLEDGMEBTTS The author wishes to thank his thesis advisor, Dr. W. B„ Jones, Jr., for his suggestion of the problem and for his continued guidance and encouragement during the course of the investigation. -

Effect of Load Impedance on the Performance of Microwave Negative Resistance Oscillators
Effect of Load Impedance on the Firas M. Ali , Suhad H. Jasim Issue No. 39/2016 Performance of Microwave… Effect of Load Impedance on the Performance of Microwave Negative Resistance Oscillators Firas Mohammed Ali Al-Raie [email protected] University of Technology - Department of Electrical Engineering - Baghdad - Iraq Suhad Hussein Jasim [email protected] University of Technology - Department of Electrical Engineering - Baghdad - Iraq Abstract: In microwave negative resistance oscillators, the RF transistor presents impedance with a negative real part at either of its input or output ports. According to the conventional theory of microwave negative resistance oscillators, in order to sustain oscillation and optimize the output power of the circuit, the magnitude of the negative real part of the input/output impedance should be maximized. This paper discusses the effect of the circuit’s load impedance on the input negative resistance and other oscillator performance characteristics in common base microwave oscillators. New closed-form relations for the optimum load impedance that maximizes the magnitude of the input negative resistance have been derived analytically in terms of the Z- parameters of the RF transistor. Furthermore, nonlinear CAD simulation is carried out to show the deviation of the large-signal Journal of Al Rafidain University College 427 ISSN (1681-6870) Effect of Load Impedance on the Firas M. Ali , Suhad H. Jasim Issue No. 39/2016 Performance of Microwave… optimum load impedance from its small-signal value. It has been shown also that the optimum load impedance for maximum negative input resistance differs considerably from its value required for maximum output power under large-signal conditions. -
The Bipolar Junction Transistor (BJT)
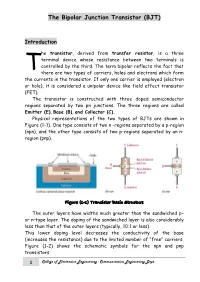
The Bipolar Junction Transistor (BJT) Introduction he transistor, derived from transfer resistor, is a three terminal device whose resistance between two terminals is controlled by the third. The term bipolar reflects the fact that T there are two types of carriers, holes and electrons which form the currents in the transistor. If only one carrier is employed (electron or hole), it is considered a unipolar device like field effect transistor (FET). The transistor is constructed with three doped semiconductor regions separated by two pn junctions. The three regions are called Emitter (E), Base (B), and Collector (C). Physical representations of the two types of BJTs are shown in Figure (1–1). One type consists of two n -regions separated by a p-region (npn), and the other type consists of two p-regions separated by an n- region (pnp). Figure (1-1) Transistor Basic Structure The outer layers have widths much greater than the sandwiched p– or n–type layer. The doping of the sandwiched layer is also considerably less than that of the outer layers (typically, 10:1 or less). This lower doping level decreases the conductivity of the base (increases the resistance) due to the limited number of “free” carriers. Figure (1-2) shows the schematic symbols for the npn and pnp transistors 1 College of Electronics Engineering - Communication Engineering Dept. Figure (1-2) standard transistor symbol Transistor operation Objective: understanding the basic operation of the transistor and its naming In order for the transistor to operate properly as an amplifier, the two pn junctions must be correctly biased with external voltages. -

A High-Resolution Reflective Microwave Planar Sensor for Sensing of Vanadium Electrolyte
sensors Article A High-Resolution Reflective Microwave Planar Sensor for Sensing of Vanadium Electrolyte Nazli Kazemi 1 , Kalvin Schofield 1 and Petr Musilek 1,2,∗ 1 Electrical and Computer Engineering, University of Alberta, Edmonton, AB T6G 1H9, Canada; [email protected] (N.K.); kschofi[email protected] (K.S.) 2 Applied Cybernetics, University of Hradec Králové, 500 03 Hradec Králové, Czech Republic * Correspondence: [email protected] Abstract: Microwave planar sensors employ conventional passive complementary split ring res- onators (CSRR) as their sensitive region. In this work, a novel planar reflective sensor is introduced that deploys CSRRs as the front-end sensing element at fres = 6 GHz with an extra loss-compensating negative resistance that restores the dissipated power in the sensor that is used in dielectric material characterization. It is shown that the S11 notch of −15 dB can be improved down to −40 dB with- out loss of sensitivity. An application of this design is shown in discriminating different states of vanadium redox solutions with highly lossy conditions of fully charged V5+ and fully discharged V4+ electrolytes. Keywords: microwave sensor; negative resistance; vanadium redox flow batteries; reflective sensor 1. Introduction Citation: Kazemi, N.; Shcofield, K.; During the past decade, microwave planar resonators have been found to be highly Musilek, P. A High-Resolution suitable for sensing applications, mainly due to their compact size, high sensitivity, low Reflective Microwave Planar Sensor manufacturing cost, and high design flexibility [1–10]. Split ring resonators (SRR), along for Sensing of Vanadium Electrolyte. with their complementary version (CSRR), are the main building blocks of these sensors [11]. -

Tunnel-Diode Microwave Amplifiers
Tunnel diodes provide a means of low-noise microwave amplification, with the amplifiers using the negative resistance of the tunnel diode to a.chieve amplification by reflection. Th e tunnel diode and its assumed equivalent circuit are discussed. The concept of negative-resistance reflection amplifiers is discussed from the standpoints of stability, gain, and noise performance. Two amplifi,er configurations are shown. of which the circulator-coupled type 1'S carried further into a design fo/' a C-band amplifier. The result 1'S an amph'fier at 6000 mc/s with a 5.S-db noise figure over 380 mc/s. An X-band amplifier is also reported. C. T. Munsterman Tunnel-Diode Microwave Am.plifiers ecent advances in tunnel-diode fabrication where the gain of the ith stage is denoted by G i techniques have made the tunnel diode a and its noise figure by F i. This equation shows that Rpractical, low-noise, microwave amplifier. Small stages without gain (G < 1) contribute greatly to size, low power requirements, and reliability make the overall system noise figure, especially if they these devices attractive for missile application, es are not preceded by some source of gain. If a pecially since receiver sensitivity is significantly low-noise-amplification device can be located near improved, with resulting increased homing time. the source of the signal, the contribution from the Work undertaken at APL over the past year has successive stages can be minimized by making G] resulted in the unique design techniques and hard sufficiently large, and the overall noise figure is ware discussed in this paper.-Y.· then that of the amplifier Fl. -

Practical Issues of Using Negative Impedance Circuits As an Antenna Matching Element
Practical Issues of Using Negative Impedance Circuits as an Antenna Matching Element by Fu Tian Wong B.E. (Electrical & Electronic, First Class Honours), The University of Adelaide, Australia, 2011 Thesis submitted for the degree of Master of Engineering Science In School of Electrical and Electronic Engineering The University of Adelaide, Australia June 2011 Copyright © 2011 by Fu Tian Wong All Rights Reserved Contents Contents ............................................................................................................................. i Abstract ............................................................................................................................ iii Statement of Originality .................................................................................................... v Acknowledgments ........................................................................................................... vii Thesis Conventions .......................................................................................................... ix List of Figures .................................................................................................................. xi List of Tables.................................................................................................................. xiii 1 Introduction and Motivation ..................................................................................... 2 1.1 Introduction ....................................................................................................... -

Silicon Controlled Rectifier
Silicon Controlled Rectifier Silicon Controlled Rectifier (SCR) is a very important member of the family of four layer pnpn devices. Some of the other members of the family are Shockley Diodes, Silicon Controlled Switch, Triac, Diac, etc. All these devices are capable of handling large currents, and hence they are rapidly taking the status of essential components in industrial applications. The application areas of SCR include relay controls, regulated power supplies, motor controls, invertors, battery chargers, protection circuits, heater controls, etc. The SCR is a three terminal, three junction device. The three terminals are called Anode, Cathode and Gate as shown in Fig. 1. The figure also shows the three junctions and circuit symbol of the device. The operation of SCR can be understood by splitting the four layer pnpn structure into two three layer transistor structures as shown in figure 2 (a) and then analyzing the resultant of Fig. 2 (b). Figure 1 Note that one transistor is pnp while the other is npn. These two transistors form a feedback circuit. Let us first consider the case where the gate is at zero potential with respect to the cathode and a positive potential is applied to the anode. VBE2 = Base emitter voltage of transistor Q2 = VAK = 0. Figure 2 So IB2 = 0 and I C2 ≅ I CO The base current of transistor Q1 is IB1 = IC2 ≅ I CO which is too strong to turn Q1 ON. Both transistors are therefore in the OFF state and the anode current IA = I CO. This represints the OFF state of the SCR. -
Power Transfer Analysis of an Asymmetric Wireless Transmission System Using the Scattering Parameters
electronics Article Power Transfer Analysis of an Asymmetric Wireless Transmission System Using the Scattering Parameters Živadin Despotovi´c , Dejan Relji´c* , Veran Vasi´c and Djura Oros Department of Power, Electronic and Telecommunication Engineering, Faculty of Technical Sciences, University of Novi Sad, Novi Sad 21000, Serbia; [email protected] (Ž.D.); [email protected] (V.V.); [email protected] (D.O.) * Correspondence: [email protected]; Tel.: +381-21-485-4545 Abstract: The most widely adopted category of the mid-range wireless power transmission (WPT) systems is based on the magnetic resonance coupling (MRC), which is appropriate for a very wide range of applications. The primary concerns of the WPT/MRC system design are the power transfer capabilities. Using the scattering parameters based on power waves, the power transfer of an asymmetric WPT/MRC system with the series-series compensation structure is studied in this paper. This approach is very convenient since the scattering parameters can provide all the relevant characteristics of the WPT/MRC system related to power propagation. To maintain the power transfer capability of the WPT/MRC system at a high level, the scattering parameter S21 is used to determine the operating frequency of the power source. Nevertheless, this condition does not coincide with the maximum possible power transfer efficiency of the system. In this regard, the WPT/MRC system is thereafter configured with a matching circuit, whereas the scattering parameter 0 S21 S21’is used to calculate and then adjust the matching frequency of the system. This results in the maximum available power transfer efficiency and thereby increases the overall performance Citation: Despotovi´c,Ž.; Relji´c,D.; of the system. -

SOME RECENT DEVELOPMENTS of REGENERATIVE Fication Which Is Based Fundamentally on Regeneration, but Which Existing Therein) Is E
SOME RECENT DEVELOPMENTS OF REGENERATIVE CIRCUITS* BY EDWIN H. ARMSTRONG (MARCELLUS HARTLEY RESEARCH LABORATORY, COLUMBIA UNIVERSITY, NEW YORK) It is the purpose of this paper to describe a method of ampli- fication which is based fundamentally on regeneration, but which involves the application of a principle and the attainment of a result which it is believed is new. This new result is obtained by the extension of regeneration into a field which lies beyond that hitherto considered its theoretical limit, and the process of amplification is therefore termed super-regeneration. Before proceeding with a description of this method it is in order to consider a few fundamental facts about regenerative circuits. It is well known that the effect of regeneration (that is, the supplying of energy to a circuit to reinforce the oscillations existing therein) is equivalent to introducing a negative resistance reaction in the circuit, which neutralizes positive resistance reaction, and thereby reduces the effective resistance of the cir- cuit. There are three conceivable relations between the nega- tive and positive resistances: namely-the negative resistance introduced may be less than the positive resistance, it may be equal to the positive resistance, or it may be greater than the positive resistance of the circuit. We will consider what occurs in a regenerative circuit con- taining inductance and capacity when an alternating electro- motive force of the resonant frequency is suddenly impressed for each of the three cases. In the first case (when the negative resistance is less than the positive), the free and forced oscillations have a maximum amplitude equal to the impnressed electomotive force over the effective resistance, and the free oscillation has a damping determined by this effective resistance.