Shults Robert D 196308 Ms 10
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Thyristors.Pdf
THYRISTORS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. Thyristors Thyristors are a class of semiconductor devices characterized by 4-layers of alternating p and n material. Four-layer devices act as either open or closed switches; for this reason, they are most frequently used in control applications. Some thyristors and their symbols are (a) 4-layer diode (b) SCR (c) Diac (d) Triac (e) SCS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The 4-layer diode (or Shockley diode) is a type of thyristor that acts something like an ordinary diode but conducts in the forward direction only after a certain anode to cathode voltage called the forward-breakover voltage is reached. The basic construction of a 4-layer diode and its schematic symbol are shown The 4-layer diode has two leads, labeled the anode (A) and the Anode (A) A cathode (K). p 1 n The symbol reminds you that it acts 2 p like a diode. It does not conduct 3 when it is reverse-biased. n Cathode (K) K Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The concept of 4-layer devices is usually shown as an equivalent circuit of a pnp and an npn transistor. Ideally, these devices would not conduct, but when forward biased, if there is sufficient leakage current in the upper pnp device, it can act as base current to the lower npn device causing it to conduct and bringing both transistors into saturation. -

Robust Wireless Power Transfer Using a Nonlinear Parity–Time-Symmetric Circuit Sid Assawaworrarit1, Xiaofang Yu1 & Shanhui Fan1
LETTER doi:10.1038/nature22404 Robust wireless power transfer using a nonlinear parity–time-symmetric circuit Sid Assawaworrarit1, Xiaofang Yu1 & Shanhui Fan1 Considerable progress in wireless power transfer has been made in PT-symmetric systems are invariant under the joint parity and the realm of non-radiative transfer, which employs magnetic-field time reversal operation14,15. In optical systems, where the symmetry coupling in the near field1–4. A combination of circuit resonance conditions can be met by engineering the gain/loss regions and and impedance transformation is often used to help to achieve their coupling, PT-symmetric systems have exhibited unusual efficient transfer of power over a predetermined distance of about properties16–20. A linear PT-symmetric system supports two phases, the size of the resonators3,4. The development of non-radiative depending on the magnitude of the gain/loss relative to the coupling wireless power transfer has paved the way towards real-world strength. In the unbroken or exact phase, eigenmode frequencies applications such as wireless powering of implantable medical remain real and energy is equally distributed between the gain and devices and wireless charging of stationary electric vehicles1,2,5–8. loss regions; in the broken phase, one of the eigenmodes grows expo- However, it remains a fundamental challenge to create a wireless nentially while the other decays exponentially. Recently, the concept power transfer system in which the transfer efficiency is robust of PT symmetry has been extensively explored in laser structures21–24. against the variation of operating conditions. Here we propose Theoretically, the inclusion of nonlinear gain saturation in the analysis theoretically and demonstrate experimentally that a parity–time- of a PT-symmetric system causes that system to reach a steady state symmetric circuit incorporating a nonlinear gain saturation element in a laser-like fashion that still contains the following PT symmetry provides robust wireless power transfer. -
Transistor Biasing
Module 2:BJT Biasing Quote of the day "Peace cannot be kept by force. It can only be achieved by understanding”. ― Albert Einstein DC Load line and Bias Point • DC Load Line – For a transistor a straight line drawn on transistor output characteristics. IC – For CE circuit, the load line is a graph of collector current I versus V for a fixed C CE IB + value of R and supply voltage V C CC + VCE – Load Line? VCC VCE I C RC VBE - - V V I R – From Figure VCE=? CE CC C C – If VBE =0 then IC=0, VCE = VCC plot this point on characteristics(A). – Now assume that ICRC = VCC, i.e. IC = VCC /RC then VCE =0. Plot this point on characteristics(B). – Join points A and B by a straight line. DC Load line contd.. VCE VCC I C RC VV IC CC CE IC RC V CC B IC(sat) RC DC load line VVCE(off ) CC V A CE Example 1. Plot the dc load line for the circuit shown in Fig. Then, find the values of VCE for IC = 1, 2, 5 mA respectively. VVIRCE CC C C VCE 10 for I c 0 10 I 10mA c 110 3 IC (mA) VCE (V) 1 9 2 8 5 5 4 Example 2. For the circuit shown and Plot of the dc load line in Fig. find the values of IC for VCE = 0V and VCE for IC = 0. VVIRCE CC C C 5 I C 4.54mA V CC15V For the previous circuit shown observe the Plot of the dc load line with Rc=4.8 K find the values of IC for VCE = 0V and VCE for IC = 0. -

Eimac Care and Feeding of Tubes Part 3
SECTION 3 ELECTRICAL DESIGN CONSIDERATIONS 3.1 CLASS OF OPERATION Most power grid tubes used in AF or RF amplifiers can be operated over a wide range of grid bias voltage (or in the case of grounded grid configuration, cathode bias voltage) as determined by specific performance requirements such as gain, linearity and efficiency. Changes in the bias voltage will vary the conduction angle (that being the portion of the 360° cycle of varying anode voltage during which anode current flows.) A useful system has been developed that identifies several common conditions of bias voltage (and resulting anode current conduction angle). The classifications thus assigned allow one to easily differentiate between the various operating conditions. Class A is generally considered to define a conduction angle of 360°, class B is a conduction angle of 180°, with class C less than 180° conduction angle. Class AB defines operation in the range between 180° and 360° of conduction. This class is further defined by using subscripts 1 and 2. Class AB1 has no grid current flow and class AB2 has some grid current flow during the anode conduction angle. Example Class AB2 operation - denotes an anode current conduction angle of 180° to 360° degrees and that grid current is flowing. The class of operation has nothing to do with whether a tube is grid- driven or cathode-driven. The magnitude of the grid bias voltage establishes the class of operation; the amount of drive voltage applied to the tube determines the actual conduction angle. The anode current conduction angle will determine to a great extent the overall anode efficiency. -

Effect of Load Impedance on the Performance of Microwave Negative Resistance Oscillators
Effect of Load Impedance on the Firas M. Ali , Suhad H. Jasim Issue No. 39/2016 Performance of Microwave… Effect of Load Impedance on the Performance of Microwave Negative Resistance Oscillators Firas Mohammed Ali Al-Raie [email protected] University of Technology - Department of Electrical Engineering - Baghdad - Iraq Suhad Hussein Jasim [email protected] University of Technology - Department of Electrical Engineering - Baghdad - Iraq Abstract: In microwave negative resistance oscillators, the RF transistor presents impedance with a negative real part at either of its input or output ports. According to the conventional theory of microwave negative resistance oscillators, in order to sustain oscillation and optimize the output power of the circuit, the magnitude of the negative real part of the input/output impedance should be maximized. This paper discusses the effect of the circuit’s load impedance on the input negative resistance and other oscillator performance characteristics in common base microwave oscillators. New closed-form relations for the optimum load impedance that maximizes the magnitude of the input negative resistance have been derived analytically in terms of the Z- parameters of the RF transistor. Furthermore, nonlinear CAD simulation is carried out to show the deviation of the large-signal Journal of Al Rafidain University College 427 ISSN (1681-6870) Effect of Load Impedance on the Firas M. Ali , Suhad H. Jasim Issue No. 39/2016 Performance of Microwave… optimum load impedance from its small-signal value. It has been shown also that the optimum load impedance for maximum negative input resistance differs considerably from its value required for maximum output power under large-signal conditions. -

Transistor Circuits
Transistor Circuits Learning Outcomes This chapter deals with a variety of circuits involving semiconductor devices. These will include bias and stabilisation for transistors, and small-signal a.c. amplifi er circuits using both BJTs and FETs. The use of both of these devices as an electronic switch is also considered. On completion of this chapter you should be able to: 1 Understand the need for correct biasing for a transistor, and perform calculations to obtain suitable circuit components to achieve this effect. 2 Understand the operation of small-signal amplifi ers and carry out calculations to select suitable circuit components, and to predict the amplifi er gain fi gure(s). 3 Understand how a transistor may be used as an electronic switch, and carry out simple calculations for this type of circuit. 1 Transistor Bias In order to use a transistor as an amplifying element it needs to be biased correctly. Although d.c. signals may be amplifi ed, the amplifi cation of a.c. signals is more common. However, the bias is provided by d.c. conditions. Consider a common emitter connected BJT and its input characteristic as illustrated in Fig. 1 . The inclusion of resistor RC is not required at this stage, but would be present in any practical amplifi er circuit, so is shown merely for completeness. This resistor is called the collector load resistor. With the switch in position ‘ 1 ’ the value of forward bias V BEQ has been chosen such that it coincides with the centre of the linear portion of the input characteristic. This point on the characteristic is identifi ed by the letter Q, because, without any a.c. -

Amplifier En.Pdf
Bipolar Junction Transistor Amplifiers Semiconductor Elements 1 © 2010,EE141 Доц.д-р. T.Василева What is an Amplifier? An amplifier is a circuit that can increase the peak-to-peak voltage, current, or power of a signal. It allows a small signal to control a much larger, high-powered one. Definitions of voltage, current and power gain coefficients are also given in figure. Lowercase italic letters indicate ac voltage and alternating currents. 2 © 2010,EE141 Доц.д-р. T.Василева 1 Amplifier Configurations There are three configurations of a BJT amplifier circuit: common- emitter (CE), common-collector (CC) and common-base (CB). The configuration is named for the electrode that is common for input and output networks. The CE is the most widely used for amplifiers because it has the best combination of current gain and voltage gain. In CE the input and output voltage are 180° out of phase, called an inversion. 3 © 2010,EE141 Доц.д-р. T.Василева Transistor Biasing Circuit with fixed base current For the transistor to operate properly as an amplifier, the base-emitter junction should be forward-biased and the base-collector junction – reverse-biased. This is called forward-reverse bias. The three dc voltages for the biased transistor are the emitter voltage UE, the collector voltage UC and the base voltage UB. These voltages are measured with respect to ground. 4 © 2010,EE141 Доц.д-р. T.Василева 2 Voltage-Divider Biasing (VDB) Voltage divider Circuit with fixed base voltage. Iдел >> IB The voltage-divider bias (VDB) configuration uses only a single dc source to provide forward-reverse bias to the transistor. -

The Venerable Triode
The Venerable Triode The very first gain device, the vacuum tube Triode, is still made after more than a hundred years, and while it has been largely replaced by other tubes and the many transistor types, it still remains popular in special industry and audio applications. I have some thoughts on why the Triode remains special for audio amplifiers (apart from sentimental value) that I would like to share. But first, a quick tutorial about Triodes: The earliest Triode was Lee De Forest's 1906 “Audion”. Over a hundred years development has resulted in many Triodes, large and small. The basic design has remained much the same. An evacuated container, usually glass, holds three signal connections, seen in the drawing as the Cathode, Grid and Plate (the Plate is also referred to as the Anode). In addition you see an internal heater, similar to a light bulb filament, which is used to heat the Cathode. Triode operation is simple. Electrons have what's known as “negative electrostatic charge”, and it is understood that “like” charges physically repel each other while opposite charges attract. The Plate is positively charged relative to the Cathode by a battery or other voltage source, and the electrons in the Cathode are attracted to the Plate, but are prevented by a natural tendency to hang out inside the Cathode and avoid the vacuum. This is where the heater comes in. When you make the Cathode very hot, these electrons start jumping around, and many of them have enough energy to leave the surface of the Cathode. -
Lab 5 Assignment
EE 462: Laboratory Assignment 5 Biasing N- channel MOSFET Transistor by Dr. A.V. Radun and Dr. K.D. Donohue (2/21/07) Updated Spring 2008 by Stephen Maloney Department of Electrical and Computer Engineering University of Kentucky Lexington, KY 40506 I. Instructional Objectives • Analyze the metal oxide semiconductor (MOS) field effect transistor (FET) (MOSFET) using a DC load line • Design a circuit to set a DC operating point for a MOSFET • Measure the operating points in a DC biased FET circuit • Become more familiar with programming in LabVIEW (See Horenstein 5.2, 7.3.1, and 7.3.3) II. Background Transistors are nonlinear devices; however, over certain operating regions they can be approximated with linear models. To ensure a transistor operates in its linear region, a DC level is added to its input signal. The design of this DC level is referred to as biasing the transistor. The DC current and voltage values are referred to as the transistor’s DC operating point (or its bias point) (or its quiescent point). Once a transistor is biased in a linear region, small changes for the input currents and voltages around the bias point will cause the outputs to change in a linearly proportional manner (approximately). It is assumed that the variation of the transistor's currents and voltages are small enough such that they do not move the system into nonlinear operation regions (triode region or cutoff). The simplest common source MOSFET amplifier biasing scheme is shown in Fig. 1. Since only the DC operating point is of interest right now, the time varying part of the input signal is omitted. -

Diodes Lesson #6 Chapter 3
Diodes Lesson #6 Chapter 3 BME 372 Electronics I – 180 J.Schesser Diodes • Typical Diode VI Characteristics – Forward Bias Region i – Reverse Bias Region d – Reverse Breakdown Region + - vd – Forward bias Threshold 5 i d 4 3 2 1 v d 0 -7-5-3-11357 -1 Reverse -2 breakdown Reverse bias Forward bias region -3 region region -4 -5 VI stands for Voltage Current BME 372 Electronics I – 181 J.Schesser Zener Diodes • Operated in the breakdown region. • Used for maintain a constant output voltage BME 372 Electronics I – 182 J.Schesser Load Line Analysis • Let’s see how to use a diode in a circuit. R Load Line 39 i D amps 35 + + 31 iD 27 VSS vD 23 -- -- 19 15 11 7 3 • Use KVL for this circuit -1 -0. -0. -0. 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 3 2 1 v D volts Vss = RiD + vD • This equation is plotted on the same graph as the diode VI characteristics. BME 372 Electronics I – 183 J.Schesser Load Line Analysis i D amps Vss = RiD + vD 39 Operating Point Vss =1.6V, R=50kΩ 35 Q-point vD=0; 31 27 Load Line iD= Vss / R 23 Highest Voltage =32amps 19 vD=Vss Highest Current 15 =1.6V; 11 7 iD=0 3 -1 -0. -0. -0. 0 0.10.20.30.40.50.60.70.80.91 1.11.21.31.41.51.61.71.8 3 2 1 BME 372 Electronics I – 184 J.Schesserv D volts Ideal Diode • Basically, a switch – Forward Bias: any current allowed, diode on – Reverse Bias: zero current, diode off 5 – No reverse breakdown region i d 4 3 2 Diode on Diode off 1 v d 0 -7-5-3-11357 -1 -2 -3 -4 -5 BME 372 Electronics I – 185 J.Schesser How do we Analysis a Circuit with an Ideal Diode • For a real diode we use load line (graphical analysis) • For an ideal diode, we use a deductive method: 1. -
Transistor Biasing
Transistor Biasing Transistor Biasing is the process of setting a transistors DC operating voltage or current conditions to the correct level so that any AC input signal can be amplified correctly by the transistor Transistor Biasing- S.Gayathri Priya 1 Need for Biasing A transistors steady state of operation depends a great deal on its base current, collector voltage, and collector current and therefore, if a transistor is to operate as a linear amplifier, it must be properly biased to have a suitable operating point. Establishing the correct operating point requires the proper selection of bias resistors and load resistors to provide the appropriate input current and collector voltage conditions. Transistor Biasing- S.Gayathri Priya 2 Q Point The correct biasing point for a bipolar transistor, either NPN or PNP, generally lies somewhere between the two extremes of operation with respect to it being either “fully-ON” or “fully- OFF” along its load line. This central operating point is called the “Quiescent Operating Point”, or Q-point for short. Transistor Biasing- S.Gayathri Priya 3 BJT Biasing methods The various types of biasing methods are: • Fixed Bias • Collector to base bias • Voltage divider bias Transistor Biasing- S.Gayathri Priya 4 Fixed Bias The transistors base current, IB remains constant for given values of Vcc, and therefore the transistors operating point must also remain fixed.Hence referred as fixed biasing Transistor Biasing- S.Gayathri Priya 5 Fixed Bias This two resistor biasing This type of transistor network is used to establish biasing arrangement is also the initial operating region of beta dependent biasing as the transistor using a fixed the steady-state condition of current bias. -
The Bipolar Junction Transistor (BJT)
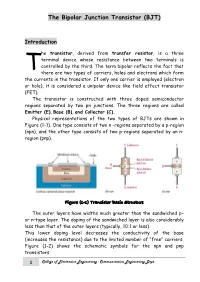
The Bipolar Junction Transistor (BJT) Introduction he transistor, derived from transfer resistor, is a three terminal device whose resistance between two terminals is controlled by the third. The term bipolar reflects the fact that T there are two types of carriers, holes and electrons which form the currents in the transistor. If only one carrier is employed (electron or hole), it is considered a unipolar device like field effect transistor (FET). The transistor is constructed with three doped semiconductor regions separated by two pn junctions. The three regions are called Emitter (E), Base (B), and Collector (C). Physical representations of the two types of BJTs are shown in Figure (1–1). One type consists of two n -regions separated by a p-region (npn), and the other type consists of two p-regions separated by an n- region (pnp). Figure (1-1) Transistor Basic Structure The outer layers have widths much greater than the sandwiched p– or n–type layer. The doping of the sandwiched layer is also considerably less than that of the outer layers (typically, 10:1 or less). This lower doping level decreases the conductivity of the base (increases the resistance) due to the limited number of “free” carriers. Figure (1-2) shows the schematic symbols for the npn and pnp transistors 1 College of Electronics Engineering - Communication Engineering Dept. Figure (1-2) standard transistor symbol Transistor operation Objective: understanding the basic operation of the transistor and its naming In order for the transistor to operate properly as an amplifier, the two pn junctions must be correctly biased with external voltages.