Eimac Care and Feeding of Tubes Part 3
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 7: AC Transistor Amplifiers
Chapter 7: Transistors, part 2 Chapter 7: AC Transistor Amplifiers The transistor amplifiers that we studied in the last chapter have some serious problems for use in AC signals. Their most serious shortcoming is that there is a “dead region” where small signals do not turn on the transistor. So, if your signal is smaller than 0.6 V, or if it is negative, the transistor does not conduct and the amplifier does not work. Design goals for an AC amplifier Before moving on to making a better AC amplifier, let’s define some useful terms. We define the output range to be the range of possible output voltages. We refer to the maximum and minimum output voltages as the rail voltages and the output swing is the difference between the rail voltages. The input range is the range of input voltages that produce outputs which are not at either rail voltage. Our goal in designing an AC amplifier is to get an input range and output range which is symmetric around zero and ensure that there is not a dead region. To do this we need make sure that the transistor is in conduction for all of our input range. How does this work? We do it by adding an offset voltage to the input to make sure the voltage presented to the transistor’s base with no input signal, the resting or quiescent voltage , is well above ground. In lab 6, the function generator provided the offset, in this chapter we will show how to design an amplifier which provides its own offset. -

Power Electronics
Diodes and Transistors Semiconductors • Semiconductor devices are made of alternating layers of positively doped material (P) and negatively doped material (N). • Diodes are PN or NP, BJTs are PNP or NPN, IGBTs are PNPN. Other devices are more complex Diodes • A diode is a device which allows flow in one direction but not the other. • When conducting, the diodes create a voltage drop, kind of acting like a resistor • There are three main types of power diodes – Power Diode – Fast recovery diode – Schottky Diodes Power Diodes • Max properties: 1500V, 400A, 1kHz • Forward voltage drop of 0.7 V when on Diode circuit voltage measurements: (a) Forward biased. (b) Reverse biased. Fast Recovery Diodes • Max properties: similar to regular power diodes but recover time as low as 50ns • The following is a graph of a diode’s recovery time. trr is shorter for fast recovery diodes Schottky Diodes • Max properties: 400V, 400A • Very fast recovery time • Lower voltage drop when conducting than regular diodes • Ideal for high current low voltage applications Current vs Voltage Characteristics • All diodes have two main weaknesses – Leakage current when the diode is off. This is power loss – Voltage drop when the diode is conducting. This is directly converted to heat, i.e. power loss • Other problems to watch for: – Notice the reverse current in the recovery time graph. This can be limited through certain circuits. Ways Around Maximum Properties • To overcome maximum voltage, we can use the diodes in series. Here is a voltage sharing circuit • To overcome maximum current, we can use the diodes in parallel. -

Valve Biasing
VALVE AMP BIASING Biased information How have valve amps survived over 30 years of change? Derek Rocco explains why they are still a vital ingredient in music making, and talks you through the mysteries of biasing N THE LAST DECADE WE HAVE a signal to the grid it causes a water as an electrical current, you alter the negative grid voltage by seen huge advances in current to flow from the cathode to will never be confused again. When replacing the resistor I technology which have the plate. The grid is also known as your tap is turned off you get no to gain the current draw required. profoundly changed the way we the control grid, as by varying the water flowing through. With your Cathode bias amplifiers have work. Despite the rise in voltage on the grid you can control amp if you have too much negative become very sought after. They solid-state and digital modelling how much current is passed from voltage on the grid you will stop have a sweet organic sound that technology, virtually every high- the cathode to the plate. This is the electrical current from flowing. has a rich harmonic sustain and profile guitarist and even recording known as the grid bias of your amp This is known as they produce a powerful studios still rely on good ol’ – the correct bias level is vital to the ’over-biased’ soundstage. Examples of these fashioned valves. operation and tone of the amplifier. and the amp are most of the original 1950’s By varying the negative grid will produce Fender tweed amps such as the What is a valve? bias the technician can correctly an unbearable Deluxe and, of course, the Hopefully, a brief explanation will set up your amp for maximum distortion at all legendary Vox AC30. -

Modelling and Characterization of DCO Using Pass Transistors
2833 E.Kanniga et al./ Elixir Power Elec. Engg. 35 (2011) 2833-2835 Available online at www.elixirpublishers.com (Elixir International Journal) Power Electronics Engineering Elixir Power Elec. Engg. 35 (2011) 2833-2835 Modelling and characterization of DCO using Pass Transistors E.Kanniga 1 and M.Sundararajan 2 1Department of ECE, Bharath University, Chennai-73 2Gojan School of Business & Technology, Chennai-52. ARTICLE INFO ABSTRACT Article history: In the field of simulation work, it could proceed to an extent that, simulate with arbitrary Received: 6 April 2011; values of the passive component and the voltage sources. The simulation results recorded Received in revised form: various strategic points in the circuit indicate and validate the fact that the circuit is working 19 May 2011; in the expected lines with regard to the energy transfer in the expected lines with regard to Accepted: 26 May 2011; the energy transfer in the tank circuit and sustenance in DC transient Analysis. Also in this proposed experimental work, it is observed that for an arbitrary load, the voltage obtained is Keywords agreeing with the theoretically computed DC-Voltage levels. The scope of the work can be Digital controlled oscillator, extended to the actual calculation of the passives, the initial voltages across the capacitors Steady state transient response, and inductors. In addition to the exciting DC levels of the sources employed. The small Simulation LTSPICE, signal analysis can also be done with due regard to the desired behavioural properties of Varactors. switching devices used. © 2011 Elixir All rights reserved. ntroduction In the digital world there is an increased requirement for Fig1 shows that NMOS transistors configured as a Varactor Digitally Controlled Oscillator (DCO). -

Tube Number Systems
Frank's Electron tube Pages Tube Number Systems European system after 1934 Philips system before 1934 Mazda numbering system Russian numbering system Brimar type designation code Tesla numbering system European system after 1934 (pro-electron) See also: Type Designation Code from "Preferred Types of Electron Tubes 1967". 1st letter heater indication 0 tubes without filament A 4 V AC parallel connection B 180 mA DC C 200 mA AC/DC series or parallel connection D <= 1.4 V DC dry-battery, parallel connection E 6.3 V AC or carbattery, parallel connection F 13 V carbattery G 5V AC parallel connection H early: 4V DC battery. later: 150mA AC/DC series connection I 20V AC/DC parallel connection K 2 V battery O 150 mA AC/DC series connection P 300 mA AC/DC series connection U 100 mA AC/DC series connection V 50mA AC/DC series connection X 600 mA AC/DC series connection Y 450 mA AC/DC series connection 2nd+next letters tube systems A single detection diode B double detection diode C small-signal triode D power triode E small-signal tetrode (or 2nd emmission tube EE1) F small-signal pentode H hexode or heptode K octode L power pentode or power tetrode M indicator tube N thyratron Q enneode W single gasfilled rectifier diode X double gasfilled rectifier diode Y single vacuum rectifier diode Z double vacuum rectifier diode digits socket & order x P (some are V) (except U-series (e.g.UBL1), those are octal) 1x Y8A 2x W8A, Loctal (except D-series (e.g. -
Electron Optics
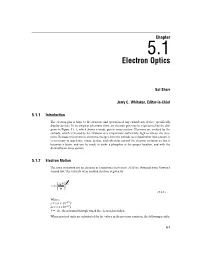
Chapter 5.1 Electron Optics Sol Sherr Jerry C. Whitaker, Editor-in-Chief 5.1.1 Introduction The electron gun is basic to the structure and operation of any cathode-ray device, specifically display devices. In its simplest schematic form, an electron gun may be represented by the dia- gram in Figure 5.1.1, which shows a triode gun in cross section. Electrons are emitted by the cathode, which is heated by the filament to a temperature sufficiently high to release the elec- trons. Because this stream of electrons emerges from the cathode as a cloud rather than a beam, it is necessary to accelerate, focus, deflect, and otherwise control the electron emission so that it becomes a beam, and can be made to strike a phosphor at the proper location, and with the desired beam cross section. 5.1.2 Electron Motion The laws of motion for an electron in a uniform electrostatic field are obtained from Newton’s second law. The velocity of an emitted electron is given by 1 2eV 2 v = m (5.1.1) Where: e = 1.6 × 10–19C m = 9.1 × 10–28g V = –Ex, the potential through which the electron has fallen When practical units are substituted for the values in the previous equation, the following results: 5-7 5-8 Electron Optics and Deflection No. 1 grid No. 2 grid Heater Defining aperture Figure 5.1.1 Triode electron gun structure. 1 vV=×5.93 105 2 m/s (5.1.2) This expression represents the velocity of the electron. -

Vacuum Tube Theory, a Basics Tutorial – Page 1
Vacuum Tube Theory, a Basics Tutorial – Page 1 Vacuum Tubes or Thermionic Valves come in many forms including the Diode, Triode, Tetrode, Pentode, Heptode and many more. These tubes have been manufactured by the millions in years gone by and even today the basic technology finds applications in today's electronics scene. It was the vacuum tube that first opened the way to what we know as electronics today, enabling first rectifiers and then active devices to be made and used. Although Vacuum Tube technology may appear to be dated in the highly semiconductor orientated electronics industry, many Vacuum Tubes are still used today in applications ranging from vintage wireless sets to high power radio transmitters. Until recently the most widely used thermionic device was the Cathode Ray Tube that was still manufactured by the million for use in television sets, computer monitors, oscilloscopes and a variety of other electronic equipment. Concept of thermionic emission Thermionic basics The simplest form of vacuum tube is the Diode. It is ideal to use this as the first building block for explanations of the technology. It consists of two electrodes - a Cathode and an Anode held within an evacuated glass bulb, connections being made to them through the glass envelope. If a Cathode is heated, it is found that electrons from the Cathode become increasingly active and as the temperature increases they can actually leave the Cathode and enter the surrounding space. When an electron leaves the Cathode it leaves behind a positive charge, equal but opposite to that of the electron. In fact there are many millions of electrons leaving the Cathode. -

Commissioning of the Mice Rf System* A
5th International Particle Accelerator Conference IPAC2014, Dresden, Germany JACoW Publishing ISBN: 978-3-95450-132-8 doi:10.18429/JACoW-IPAC2014-WEPME020 COMMISSIONING OF THE MICE RF SYSTEM* A. Moss, A. Wheelhouse, T. Stanley, C. White, STFC, Daresbury Laboratory, Warrington, UK K. Ronald, C.G. Whyte, A.J. Dick, D.C. Speirs, SUPA, Dept.of Physics, University of Strathclyde, Glasgow, UK S. Alsari, Imperial College of Science and Technology, London, UK on behalf of the MICE Collaboration Abstract feature adjustable sections to change the response of the cavity to both input line and resistive load. On the output The Muon Ionisation Cooling Experiment (MICE) is of the amplifier, the cavity length and hence its resonant being constructed at Rutherford Appleton Laboratory in frequency can be adjusted, whilst a stub tuner is located in the UK. The muon beam will be cooled using multiple the output coax section to alter the coupling factor into hydrogen absorbers then reaccelerated using an RF cavity the output coax so that the amplifier may be used to drive system operating at 201MHz. This paper describes recent a range of different load conditions. For use in the MICE progress in commissioning the amplifier systems at their system the 4616 operates in long pulse mode using grid design operation conditions, installation and operation as pulsed operation and can provide up to 250kW RF output part of the MICE project. power. INTRODUCTION 4616 Power Supply The muon ionisation cooling experiment is a The power supply for the tetrode amplifier consists of a demonstration of practical cooling for future muon TDK-Lambda 500A capacitor charger power supply acceleration schemes. -

The Development of the Vacuum Tube Creators
The Knowledge Bank at The Ohio State University Ohio State Engineer Title: The Development of the Vacuum Tube Creators: Jeffrey, Richard B. Issue Date: May-1928 Publisher: Ohio State University, College of Engineering Citation: Ohio State Engineer, vol. 11, no. 7 (May, 1928), 9-10. URI: http://hdl.handle.net/1811/34260 Appears in Collections: Ohio State Engineer: Volume 11, no. 7 (May, 1928) THE OHIO STATE ENGINEER The Development of the Vacuum Tube By RICHARD B. JEFFREY, '31 The history of the vacuum tube began with the discovery of the Edison Effect. This, like a great many other important discoveries, was an acci- dent. Edison, while experimenting with his in- candescent lamps, had placed more than one fila- output ment in the same bulb, and he noticed that if one of the filaments was held positive with respect to the other a current would flow through the bulb. He also found that this positive element, or, as it is now called, plate, did not have to be hot to sustain this current flow. This phenomenon li—- H was known for some time as a curiosity, but noth- 1 +90 to \35 ing more. Then Fleming, an English experiment- +4-5 er, noticed that if an alternating current were The screen-qrid tube (tetrode). applied to this plate the current would flow only plicated system by making use of the rectifying when the plate was positive. In other words, the properties of a crystal, notably galena. When tube acted as a rectifier, allowing the current to signals were received in this way it was the signal flow in only one direction. -

Notes for Lab 1 (Bipolar (Junction) Transistor Lab)
ECE 327: Electronic Devices and Circuits Laboratory I Notes for Lab 1 (Bipolar (Junction) Transistor Lab) 1. Introduce bipolar junction transistors • “Transistor man” (from The Art of Electronics (2nd edition) by Horowitz and Hill) – Transistors are not “switches” – Base–emitter diode current sets collector–emitter resistance – Transistors are “dynamic resistors” (i.e., “transfer resistor”) – Act like closed switch in “saturation” mode – Act like open switch in “cutoff” mode – Act like current amplifier in “active” mode • Active-mode BJT model – Collector resistance is dynamically set so that collector current is β times base current – β is assumed to be very high (β ≈ 100–200 in this laboratory) – Under most conditions, base current is negligible, so collector and emitter current are equal – β ≈ hfe ≈ hFE – Good designs only depend on β being large – The active-mode model: ∗ Assumptions: · Must have vEC > 0.2 V (otherwise, in saturation) · Must have very low input impedance compared to βRE ∗ Consequences: · iB ≈ 0 · vE = vB ± 0.7 V · iC ≈ iE – Typically, use base and emitter voltages to find emitter current. Finish analysis by setting collector current equal to emitter current. • Symbols – Arrow represents base–emitter diode (i.e., emitter always has arrow) – npn transistor: Base–emitter diode is “not pointing in” – pnp transistor: Emitter–base diode “points in proudly” – See part pin-outs for easy wiring key • “Common” configurations: hold one terminal constant, vary a second, and use the third as output – common-collector ties collector -

ECE 255, MOSFET Basic Configurations
ECE 255, MOSFET Basic Configurations 8 March 2018 In this lecture, we will go back to Section 7.3, and the basic configurations of MOSFET amplifiers will be studied similar to that of BJT. Previously, it has been shown that with the transistor DC biased at the appropriate point (Q point or operating point), linear relations can be derived between the small voltage signal and current signal. We will continue this analysis with MOSFETs, starting with the common-source amplifier. 1 Common-Source (CS) Amplifier The common-source (CS) amplifier for MOSFET is the analogue of the common- emitter amplifier for BJT. Its popularity arises from its high gain, and that by cascading a number of them, larger amplification of the signal can be achieved. 1.1 Chararacteristic Parameters of the CS Amplifier Figure 1(a) shows the small-signal model for the common-source amplifier. Here, RD is considered part of the amplifier and is the resistance that one measures between the drain and the ground. The small-signal model can be replaced by its hybrid-π model as shown in Figure 1(b). Then the current induced in the output port is i = −gmvgs as indicated by the current source. Thus vo = −gmvgsRD (1.1) By inspection, one sees that Rin = 1; vi = vsig; vgs = vi (1.2) Thus the open-circuit voltage gain is vo Avo = = −gmRD (1.3) vi Printed on March 14, 2018 at 10 : 48: W.C. Chew and S.K. Gupta. 1 One can replace a linear circuit driven by a source by its Th´evenin equivalence. -
Thyristors.Pdf
THYRISTORS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. Thyristors Thyristors are a class of semiconductor devices characterized by 4-layers of alternating p and n material. Four-layer devices act as either open or closed switches; for this reason, they are most frequently used in control applications. Some thyristors and their symbols are (a) 4-layer diode (b) SCR (c) Diac (d) Triac (e) SCS Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The 4-layer diode (or Shockley diode) is a type of thyristor that acts something like an ordinary diode but conducts in the forward direction only after a certain anode to cathode voltage called the forward-breakover voltage is reached. The basic construction of a 4-layer diode and its schematic symbol are shown The 4-layer diode has two leads, labeled the anode (A) and the Anode (A) A cathode (K). p 1 n The symbol reminds you that it acts 2 p like a diode. It does not conduct 3 when it is reverse-biased. n Cathode (K) K Electronic Devices, 9th edition © 2012 Pearson Education. Upper Saddle River, NJ, 07458. Thomas L. Floyd All rights reserved. The Four-Layer Diode The concept of 4-layer devices is usually shown as an equivalent circuit of a pnp and an npn transistor. Ideally, these devices would not conduct, but when forward biased, if there is sufficient leakage current in the upper pnp device, it can act as base current to the lower npn device causing it to conduct and bringing both transistors into saturation.