5.6 Unforced Mechanical Vibrations 215
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
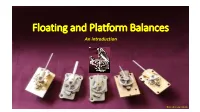
Floating and Platform Balances an Introduction
Floating and Platform Balances An introduction ©Darrah Artzner 3/2018 Floating and Platform Balances • Introduce main types • Discuss each in some detail including part identification and function • Testing and Inspecting • Cleaning tips • Lubrication • Performing repairs Balance Assembly Type Floating Platform Floating Balance Frame Spring stud Helicoid spring Hollow Tube Mounting Post Regulator Balance wheel Floating Balance cont. Jewel Roller Pin Paired weight Hollow Tube Safety Roller Pivot Wire Floating Balance cont. Example Retaining Hermle screws Safety Roller Note: moving fork Jewel cover Floating Balance cont. Inspecting and Testing (Balance assembly is removed from movement) • Inspect pivot (suspension) wire for distortion, corrosion, breakage. • Balance should appear to float between frame. Top and bottom distance. • Balance spring should be proportional and not distorted in any way. • Inspect jewels for cracks and or breakage. • Roller pin should be centered when viewed from front. (beat) • Rotate balance wheel three quarters of a turn (270°) and release. It should rotate smoothly with no distortion and should oscillate for several (3) minutes. Otherwise it needs attention. Floating Balance cont. Cleaning • Make sure the main spring has been let down before working on movement. • Use non-aqueous watch cleaner and/or rinse. • Agitate in cleaner/rinse by hand or briefly in ultrasonic. • Rinse twice and final in naphtha, Coleman fuel (or similar) or alcohol. • Allow to dry. (heat can be used with caution – ask me how I would do it.) Lubrication • There are two opinions. To lube or not to lube. • Place a vary small amount of watch oil on to the upper and lower jewel where the pivot wire passed through the jewel holes. -

Collectable POCKET Watches 1750-1920
cOLLECTABLE POCKET watches 1750-1920 Ian Beilby Clocks Magazine Beginner’s Guide Series No 5 cOLLECTABLE POCKET watches 1750-1920 Ian Beilby Clocks Magazine Beginner’s Guide Series No 5 Published by Splat Publishing Ltd. 141b Lower Granton Road Edinburgh EH5 1EX United Kingdom www.clocksmagazine.com © 2017 Ian Beilby World copyright reserved ISBN: 978-0-9562732-4-6 The right of Ian Beilby to be identified as author of this work has been asserted in accordance with the Copyright, Designs and Patents Act 1988. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the publisher. 2 4 6 8 10 9 7 5 3 1 Printed by CBF Cheltenham Business Forms Ltd, 67 Hatherley Road, Cheltenham GL51 6EG CONTENTS Introduction 7 Chapter 1. The eighteenth century verge watch 13 Chapter 2. The nineteenth century verge watch 22 Chapter 3. The English cylinder and rack lever watch 36 Chapter 4. The English lever watch 42 Chapter 5. The Swiss lever watch 54 Chapter 6. The American lever watch 62 Chapter 7. The Swiss cylinder ladies’ fob watch 72 Chapter 8. Advice on collecting and maintenance 77 Appendix 1. Glossary 82 Appendix 2. Further reading 86 CLOCKS MAGAZINE BEGINNER’S GUIDE SERIES No. 1. Clock Repair, A Beginner’s Guide No. 2. Beginner’s Guide to Pocket Watches No. 3. American Clocks, An Introduction No. 4. What’s it Worth, Price Guide to Clocks 2014 No. -

Physics 2305 Lab 11: Torsion Pendulum
Name___________________ ID number_________________________ Date____________________ Lab partner_________________________ Lab CRN________________ Lab instructor_______________________ Physics 2305 Lab 11: Torsion Pendulum Objective 1. To demonstrate that the motion of the torsion pendulum satisfies the simple harmonic form in equation (3) 2. To show that the period (or angular frequency) of the simple harmonic motion of the torsion pendulum is independent of the amplitude of the motion 3. To make measurements to demonstrate the validity of equation (6), which relates the angular frequency of motion to the torsion constant and the moment of inertia of the torsion pendulum Useful background reading Young and Freedman, section 13.1, 13.2, 13.4 (the “angular SHM” section, specifically) Introduction A torsion pendulum is shown schematically to the right. A disk with moment of inertia I0 is fastened near the center of a long straight wire stretched between two fixed mounts. If the disk is rotated through an angle θ and released, the twist in the wire rotates the disk back toward equilibrium. It overshoots and I 0 oscillates back and forth like a pendulum, hence the name. Torsion pendulums are used for the timing element in some θ clocks. The most common variety is a decorative polished brass mechanism under a glass dome. You may have seen one. The balance wheel in an old fashioned mechanical watch is a kind of torsion pendulum, though the restoring force is provided by a flat coiled spring rather than a long twisted wire. Torsion pendulums can be made very accurate and have been used in numerous precision experiments in 1 physics. -

Dynamics of Periodic Impulsive Collision in Escapement Mechanism
Shock and Vibration 20 (2013) 1001–1010 1001 DOI 10.3233/SAV-130800 IOS Press Dynamics of periodic impulsive collision in escapement mechanism Jian Maoa,∗,YuFub and Peichao Lia aShanghai University of Engineering Science, Shanghai, China bTianjin Seagull Watch Co. Ltd, Tianjin, China Received 10 May 2012 Revised 25 January 2013 Accepted 13 April 2013 Abstract. Among various non-smooth dynamic systems, the periodically forced oscillation system with impact is perhaps the most common in engineering applications. The dynamical study becomes complicated due to the impact. This paper presents a systematic study on the periodically forced oscillation system with impact. A simplified model of the escapement mechanism is introduced. Impulsive differential equation and Poincare map are applied to describe the model and study the stability of the system. Numerical examples are given and the results show that the model is highly accurate in describing/predicting their dynamics. Keywords: Periodic collision, dynamics, escapement mechanism 1. Introduction Dynamics is an important branch of mechanical engineering. In the last century, the linear dynamics was well studied and understood. However, nonlinear dynamics is far from being fully understood because of its complexity and diversity [1]. Non-smooth dynamical system is a special category of nonlinear system. In practice, it is not difficult to find non-smooth dynamical systems, such as a hammer hitting a nail, a signal triggering an electrical circuit, and a disaster affecting the stock market. It is known that a typical smooth dynamical system can be described by an autonomous set of Ordinary Differen- tial Equations (ODEs) [2–6]. Newton method and Lagrange’s equation are two basic tools to model such dynamical systems. -
Operating Principles, Common Questions, and Performance Data for an Atmospheric Driven Atmos Clock David Moline Clemson University
Clemson University TigerPrints Publications Mechanical Engineering 1-2015 Operating Principles, Common Questions, and Performance Data for an Atmospheric Driven Atmos Clock David Moline Clemson University John Wagner Clemson University, [email protected] Follow this and additional works at: https://tigerprints.clemson.edu/mecheng_pubs Part of the Mechanical Engineering Commons Recommended Citation Please use publisher's recommended citation. This Article is brought to you for free and open access by the Mechanical Engineering at TigerPrints. It has been accepted for inclusion in Publications by an authorized administrator of TigerPrints. For more information, please contact [email protected]. Atmos Article for NAWCC Bulletin Operating Principles, Common Questions, and Performance Data for an Atmospheric Driven Atmos Clock David Moline and John Wagner (Chapter 126 - Western Carolinas members) Abstract: The elegance of the Atmos clock and the curiosity of mankind in self-operational mechanical systems have propelled this time device into our collective desire for more knowledge. The search for a self-winding time piece, based on normal atmospheric fluctuations, was pursued for centuries by horologists with the well-known clock proposed by J. L. Reutter and commercialized by Jaeger LeCoultre. This clock has generated numerous discussions throughout the years as noted in past Bulletin articles and other correspondences within the time keeping community. In this paper, the operating principles of the Atmos clock will be reviewed using fundamental science and engineering principles. Next, key questions and experimental observations will be discussed in light of the operating concepts to clarify the clock’s performance. Finally, an extensive database will be introduced which was gathered through physical measurements and data recording of an Atmos 540 clock. -

Gruen Watchmaking Lessons
'.' .,~ THE GRUEN WATCH COMPANY ,.., ._. ' Tim§ Hill / . Cincinnati 6 Ohio .. _) 1 LESSON III Balance - Page 9 ( Part l - What is the Balance Wheel? The balance is the governing part or regulator of a watch. It was first used about 1600 and was merely a crude wheel of any kind of material. The complete · balance wheel assembly ,is composed of the balance wheel, balance staff, roller table and hairspring. The timekeeping possibilities of a watch depend upon the·balance. If its size and weight are not in the correct proportions to the motive force and the rest of the movement, no a_djustment can be made that can make it a good time piece. Therefore, the hairspring and all other parts are always secondary in importance to the balance wheel, There are two types of balance wheels, the cut bi-metallic and the solid rim or mono-metallic wheels. A brief description of each ldnd follows: The cut-rim bi-metallic balance is made of a steel center bar or arm, carry ing a circular rim cut into two sections, each of tho sections having one free end. and the other end attached to the center bar. Tho circular rim is constructed of ,j(i_'~--- brass·and steel fused together, The former metal, which is affected most by tempera tures, is placed on tho outer side of tho rim, Holes are drilled and tapped radial . ly through the rim to cal'ry tho balance screws, The purpose of the balance screws . is to provide a weight that may be shifted to make temperature adjustments, Tho number of holes exceeds the number of screws in the balance, as allowance must be 1. -

Readingsample
History of Mechanism and Machine Science 21 The Mechanics of Mechanical Watches and Clocks Bearbeitet von Ruxu Du, Longhan Xie 1. Auflage 2012. Buch. xi, 179 S. Hardcover ISBN 978 3 642 29307 8 Format (B x L): 15,5 x 23,5 cm Gewicht: 456 g Weitere Fachgebiete > Technik > Technologien diverser Werkstoffe > Fertigungsverfahren der Präzisionsgeräte, Uhren Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. Chapter 2 A Brief Review of the Mechanics of Watch and Clock According to literature, the first mechanical clock appeared in the middle of the fourteenth century. For more than 600 years, it had been worked on by many people, including Galileo, Hooke and Huygens. Needless to say, there have been many ingenious inventions that transcend time. Even with the dominance of the quartz watch today, the mechanical watch and clock still fascinates millions of people around the, world and its production continues to grow. It is estimated that the world annual production of the mechanical watch and clock is at least 10 billion USD per year and growing. Therefore, studying the mechanical watch and clock is not only of scientific value but also has an economic incentive. Never- theless, this book is not about the design and manufacturing of the mechanical watch and clock. Instead, it concerns only the mechanics of the mechanical watch and clock. -
Huygens and the Advancement of Time Measurements
Huygens and the Advancement of Time Measurements Kees Grimbergen1,2 1 Medical Physics, Academic Medical Centre, University of Amsterdam 2 Museum van het Nederlandse Uurwerk (MNU), Museum of the Dutch Clock, Zaandam, The Netherlands Academic Medical Center Titan: From Discovery to Encounter, Noordwijk 16 April, 2004 MNU Zaans Uurwerkenmuseum 1976 2001 Museum van het Nederlandse Uurwerk Museum van het Nederlandse Uurwerk • Collection of Dutch Clocks; Period 1500 - 1850 * Hague clocks * Longcase clocks * Wall clocks * Table clocks * Regional clocks (Zaan region, Brabant, Friesland) * Precision clocks Salomon Coster with ‘privilege’ Christiaan Huygens; Collection Museum van het Nederlandse Uurwerk, ca 1658 Christiaan Huygens 14 april 1629 - 8 juli 1695 P. Bourguignon ca 1688; coll KNAW Museum of the Dutch Clock Medical Physics Laboratory Henk van der Tweel 1915 - 1997 Mechanical Clocks (> 1300) 1200 . 1300 . 1400 . 1500 . 1600 . 1700 . 1800 . 1900 . 2000 . 2100 Foliot/Balance Wheel Pendulum/Balance spring Huygens 1656, 1675 Early Turret Clocks Maastricht 1400?; Winkel (N-H) ~1460 Early Mechanical Clocks Nürnberg ca 1450 Nederland ca 1520 (MNU) Museum of the Dutch Clock Exhibition Willem Barents and his Clock; 1596-1996 • Model from ca 1450 • Not touched since 1596 • Collection Rijksmuseum Mechanical Clocks; 1300 - 1656 Foliot/Vertical Verge-Escapement M = I ¶w/¶t = I ¶2f/¶t2 M I w M j Mechanical Clocks; 1300 - 1656 Foliot/Vertical Verge-Escapement T = 2 Ö2 fmax(I/M) M T I w M j Mechanical Clocks; 1300 - 1656 Foliot/Vertical Verge-Escapement -

The Early History of Chronometers : a Background Study Related to the Voyages of Cook, Bligh, and Vancouver
The Early History of Chronometers : A Background Study Related to the Voyages of Cook, Bligh, and Vancouver SAMUEL L. MAGE Y The purpose of this paper is to outline the historical developments relat ing to the chronometer, which played so crucial a part in the voyages of discovery made by Cook, Bligh and Vancouver. The inventor of the first successful chronometer — a technological marvel of precision watchmak ing — was John Harrison. His most famous model was the prize-winning H4 of 1759. Kendall's copy of this, known as Ki, helped Cook to plot the first charts of New Zealand and Australia. Ki was also used by Van couver, while K2 was once carried by Bligh on the Bounty.1 It is generally well known that in 1714 the British Admiralty offered a prize of twenty thousand pounds (possibly a million dollars in modern terms) for a method that could determine longitude on board a ship to within half a degree (or approximately thirty miles) on a passage to the West Indies. It is, however, less well appreciated how important a part the need for deter mining longitude had already played in the process of developing accurate clocks and watches for use on land as well as on the sea. Commander Waters has pointed out that "By about 1254 the Medi terranean seaman" knew his "direction between places to within less than 30 of arc", as well as his distances; "By about 1275 ... he had also a remarkably accurate sea chart of the whole of the Mediterranean and Black Sea coastlines", together with the sea compass and relevant table.2 Though there are claims that the sea compass was a European inven tion of slightly earlier date, Price feels that the use of the loadstone in navigation was probably of Chinese origin. -

The History of Watches
Alan Costa 18 January, 1998 Page : 1 The History of Watches THE HISTORY OF WATCHES ................................................................................................................ 1 OVERVIEW AND INTENT ........................................................................................................................ 2 PRIOR TO 1600 – THE EARLIEST WATCHES ..................................................................................... 3 1600-1675 - THE AGE OF DECORATION ............................................................................................... 4 1675 – 1700 – THE BALANCE SPRING ................................................................................................... 5 1700-1775 – STEADY PROGRESS ............................................................................................................ 6 1775-1830 - THE FIRST CHRONOMETERS ........................................................................................... 8 1830-1900 – THE ERA OF COMPLICATIONS ..................................................................................... 10 1900 ONWARDS – METALLURGY TO THE RESCUE? .................................................................... 12 BIBLIOGRAPHY ....................................................................................................................................... 15 Alan Costa 18 January, 1998 Page : 2 Overview and Intent This paper is a literature study that discusses the changes that have occurred in watches over time. It covers mainly -

Horological TM Times Contents VOLUME 33, NUMBER 11, NOVEMBER 2009
Jules Borel& Co. for Better Watch Testing 'f'leMJ[ Calibration Service for high-end watch testing equipment Accuracy to Equipment should be calibrated 1OOth second at least every five years of a day or less! • Witschi • Expert (Red Case) Sensor picks up signals from 4-5 satellites • Expert II and Ill • Chronoscope Ml • Chronoscope MlO • New Tech Handy II • Q Test 6000 • Analyzer Ql • Analyzer Twin GPS Receiver blends • And others! 4-5 signals and transfers 1 Hz signal to the timing machine I Jon :- d d\"\1'1', ,.,atc.\\eS· .. $150 per calibrat' ~ ·-·- Ill . e"t to test \\\l',n-e" Dated Label & Calibration Certificate 1 is provided with each service ttE.Q\}\RE. t\\\S e<\\1 llffl Wet test to 125 BAR c.\\ roa"\l~ac.t\ltets :t Test for condensation So11'e 'f'l'a Limited quantities in stock Call today! Handle in for ratchet function to increase high to crank up pressure quickly under low pressure .'<,•:,:,::.-;:~ · ~ · · - · VIB-Natator-125 by Roxer TS-Preciso47 Heating Plate Waterproof Tester ·-;:;·.':':~·.';::;::-·- ~ Jules Borel & Co . •Jin•·el 1110 Grand Boulevard • Kansas City, Missouri 64106 Phone 800-776-6858 • Fax 800-776-6862 • julesborel.com HoROLOGICAL TM TIMEs CoNTENTS VOLUME 33, NUMBER 11, NOVEMBER 2009 Official Publication of the American Watchmakers-Ciockmakers Institute FEATURES A Note from Nancy Wellmann 6 EDITORIAL & EXECUTIVE OFFICES AWCI Official Opinion and Policy Regarding the Distribution of American Watchmakers-Ciockmakers Institute (AWCI) 701 Enterprise Drive Replacement Parts, Equipment, Technical Data, and Education 8 Harrison, OH 45030 Some Useful Accessories for the Schaublin 70 Lathe, Toll Free 1-866-FOR-AWCI (367-2924) or (513) 367-9800 By J. -

A New Marine Chronometer the Chronostat Iii Leroy
A NEW MARINE CHRONOMETER THE CHRONOSTAT III LEROY by P. Covillault, Ingénieur Hydrographe en Chef French Naval Hydrographie Office To say that the need to know the time is the basis of every form of hydrographic activity is to state an obvious fact. Certainly, hydrographers do not always need, except for certain opera tions in geodetic astronomy, to know the time with any great precision, but they always need to know the correct time in order, in all circumstances, to be able to time isolated, simultaneous or consecutive observations in an absolute and relative manner. It is therefore necessary for them continually to refer to a time-piece and, as their work is carried out either at sea, on board a ship, or on land under unstable conditions, this time-piece must not only be mobile and self- contained, but also remain unaffected by the movement of the vessel at sea. Thus, hydrographers find it essential to use marine chronometers. That is why it seems useful to mention in these pages the recent intro duction of the Mark III Leroy chronostat. Historical note The marine chronometer, which has been universally used by navigators for centuries, is a direct descendant of the magnificent inventions of the great clock makers of the 18th century, and in particular of H a r r i s o n , Pierre L e r o y and Ferdinand B e r t h o u d . During the course of the following years until the last war, many great French clock makers : Bréguet, Dumas, W innerl, Vissières to name only the most famous, made hundreds of efficient marine chronometers, of which many are still in use.