Geometry-Based Simulation of Mechanical Movements and Virtual Library
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Grandfathers' Clocks: Their Making and Their Makers in Lancaster County
GRANDFATHERS' CLOCKS: THEIR MAKING AND THEIR MAKERS IN LANCASTER COUNTY, Whilst Lancaster county is not the first or only home of the so-called "Grandfathers' Clock," yet the extent and the excellence of the clock industry in this type of clocks entitle our county to claim special distinction as one of the most noted centres of its production. I, therefore, feel the story of it specially worthy of an enduring place in our annals, and it is with pleasure •and patriotic enthusiasm that I devote the time and research necessary to do justice to the subject that so closely touches the dearest traditions of our old county's social life and surroundings. These old clocks, first bought and used by the forefathers of many of us, have stood for a century or more in hundreds of our homes, faithfully and tirelessly marking the flight of time, in annual succession, for four genera- tions of our sires from the cradle to the grave. Well do they recall to memory and imagination the joys and sorrows, the hopes and disappointments, the successes and failures, the ioves and the hates, hours of anguish, thrills of happiness and pleasure, that have gone into and went to make up the lives of the lines of humanity that have scanned their faces to know and note the minutes and the hours that have made the years of each succeeding life. There is a strong human element in the existence of all such clocks, and that human appeal to our thoughts and memories is doubly intensified when we know that we are looking upon a clock that has thus spanned the lives of our very own flesh and blood from the beginning. -

Possible Accurate Time/Frequency Sources for Maserless VLBI? Seticon04
Possible accurate time/frequency sources for maserless VLBI? SETICon04 Marko Cebokli S57UUU ABSTRACT - The SETI League's project ARGUS currently works as a set of independent antennas/receivers, distributed in direction to maximize solid angle coverage. In some cases like wanting to do a follow-up observation with increased sensitivity, it would be desirable to coherently combine signals from several antennas. Since project ARGUS antennas are geographically dispersed, VLBI techniques will have to be used. This paper gives a quick overview of possible synchronization sources available to stations lacking atomic standards or masers. 1. REQUIREMENTS When combining two coherent signals of equal amplitude, to keep combining losses below 1dB, the phase error must be less than 54 degrees. This is similar to the common optical criterion of 1/8 wavelength or 45 degrees wavefront error. In terms of delay, for example on 1.4GHz, that is cca 100ps or 3cm of path length difference. For a 100 sec integration time, for example, the required accuracy is therefore 1E- 12. On lower frequencies, the requirement gets relaxed proportionally to wavelength, but VLBI gets difficult because of the random delays in the ionosphere, which quickly increase below a few hundred Mhz. Maybe some equivalent of adaptive optics as used by optical astronomers to mitigate atmospheric turbulence ('seeing') could be used here to take the twinkle out of the ionosphere on the lower bands? Apart from the RF frequency/phase synchronization, there is also the need to synchronize the recording start time, to reduce the amount of searching needed at the central correlating station. -
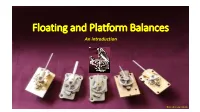
Floating and Platform Balances an Introduction
Floating and Platform Balances An introduction ©Darrah Artzner 3/2018 Floating and Platform Balances • Introduce main types • Discuss each in some detail including part identification and function • Testing and Inspecting • Cleaning tips • Lubrication • Performing repairs Balance Assembly Type Floating Platform Floating Balance Frame Spring stud Helicoid spring Hollow Tube Mounting Post Regulator Balance wheel Floating Balance cont. Jewel Roller Pin Paired weight Hollow Tube Safety Roller Pivot Wire Floating Balance cont. Example Retaining Hermle screws Safety Roller Note: moving fork Jewel cover Floating Balance cont. Inspecting and Testing (Balance assembly is removed from movement) • Inspect pivot (suspension) wire for distortion, corrosion, breakage. • Balance should appear to float between frame. Top and bottom distance. • Balance spring should be proportional and not distorted in any way. • Inspect jewels for cracks and or breakage. • Roller pin should be centered when viewed from front. (beat) • Rotate balance wheel three quarters of a turn (270°) and release. It should rotate smoothly with no distortion and should oscillate for several (3) minutes. Otherwise it needs attention. Floating Balance cont. Cleaning • Make sure the main spring has been let down before working on movement. • Use non-aqueous watch cleaner and/or rinse. • Agitate in cleaner/rinse by hand or briefly in ultrasonic. • Rinse twice and final in naphtha, Coleman fuel (or similar) or alcohol. • Allow to dry. (heat can be used with caution – ask me how I would do it.) Lubrication • There are two opinions. To lube or not to lube. • Place a vary small amount of watch oil on to the upper and lower jewel where the pivot wire passed through the jewel holes. -

Th B T the Brocots
The BtBrocots A Dyyynasty of Horologers Presented by John G. Kirk 1 Outline • Introduction • Background: Paris Clocks • Brocot GlGenealogy • The Men and Their Works • Gallery 2 Outline • Introduction • Background: Paris Clocks • Brocot GlGenealogy • The Men and Their Works • Gallery 3 Introduction • This is a review of “Les Brocot, une dynastie d’ horlogers” by Richard Chavigny • Dean Armentrout asked me to discover the following: – How many/who are the Brocots who contributed to horology (see below…) – The years the famous innovations were made (and by whom) (see below…) – How the Brocot dynasty interacted with other clockmakers, for example the house of Le Roy (i(curious ly, such iitnterac tions, if any, aren’t mentioned in the book) 4 Outline • Introduction • Background: Paris Clocks • Brocot GlGenealogy • The Men and Their Works • Gallery 5 The Paris Clock (1 of 5) • The term, la Pendule de Paris, applies to table/mantel clocks developed by Parisian clockmakers • Beginning around 1810 and continuing well into the 20th century production of these clocks evolved into a highly industrialized process 6 The Paris Clock (2 of 7) • Around 1810, Paris clocks were no longer fabricated from scratch in Paris except by the grand houses, such as Breguet, Le Paute, etc. • A “mass” market for high quality, competitively‐priced “Clocks of Commerce” developed based on ébauches completed and finished in Paris 7 The Paris Clock (3 of 7) • The ébauches comprised – The two plates – The barrel (without spring) – The stiktrike titrain compltlete with dtdeten -
C9 Collection
C9 COLLECTION O W N E R ’ S H A N D B O O K TIME ON YOUR SIDE... Your Christopher Ward watch has been designed and engineered by highly talented craftspeople to ensure not only accurate and precise timekeeping but also to bring a real pride of ownership that only luxury items of the highest quality can ever hope to deliver. You have made an investment, a good one, and the aim of this handbook is to help you make the most of that investment during what I hope will be a lifetime of ownership. Christopher Ward 1 JOHN HARRISON WATCHMAKER John Harrison was born in 1693 in Foulby, West Yorkshire and lived for most of his life in Barrow upon Humber. He became a carpenter, like his father, was a gifted musician and a self-taught watchmaker, creating his first timepieces entirely out of wood. He moved to London in the 1750s, at the height of his development of his “sea watches” and died in the capital in 1776. The ship’s chronometers were rediscovered at the Royal Greenwich Observatory in the mid-20th century and restored. Today the H1, H2, H3 and H4 are on display at the National Maritime Museum in Greenwich. The H5 is owned by the Worshipful Company of Clockmakers, and is displayed in the Clockmaker’s Museum in London’s Guildhall. 2 THE LONGITUDE SOLUTION In 1760 horologist John Harrison took his 1735 invention of the Marine Chronometer to a higher level by making it portable in the form of a pocket watch - his H4 was effectively the first precision watch and the true ancester of the Christopher Ward collection. -
Chrono Times NAWCC Chapter 190 Newsletter
Chrono Times NAWCC Chapter 190 Newsletter Ventura and Santa Barbara Counties INSIDE THIS ISSUE November/December 2015 President’s Message 1, 5 Tales From The Bench PRESIDENT’S MESSAGE Ferdinand Geitner 2-4 By George Gaglini Meeting Location 2 This Month’s t has been my pleasure to serve as President of Chapter 190 for 2014 Mini Workshop 3 I and 2015. In these years I have seen our chapter continue to grow in Chapter Meeting membership (176 members as of last count) and vigorously pursue its Calendar 3 mission to preserve and encourage interest in and appreciation of the art The Santa Barbara Tower Clock—Breakdown and and science of timekeeping, timepieces and all things horological. Repair Ernie Jensen 6-10 In past mini-workshops and monthly meeting programs, Chapter 190’s Biography: enthusiasts learned how to anneal metal without using flame, and the best Mark Harmeling 11 way to pack precious and delicate clocks for safe shipment by commercial Introduction to Clock carriers. In a recent 2015 meeting program, members and guests discov- Collecting Repair and Maintenance ered the secrets behind “mystery clocks.” In yet another, we marveled at a David Perez 12 –14 series of ingenious homemade tools that help in clock repair and restora- Highlights of September’s tion. Every monthly meeting is packed with information and designed to Meeting 15 raise interest and provide answers to questions attendees may have in the Educational Workshops 16 ever-expanding world of horological knowledge. (Continued on page 5) Chapter Officers 17 Classifieds 18 TALES FROM THE BENCH By Ferdinand Geitner The Weakest Link beautiful triple fusee A English Bracket Clock, chiming on 8 bells came by my shop recently with what the customer thought was a broken spring. -

Download Catalogue
This catalogue provides a selection of timepieces from our collection. You can find more information and relevant details on the Junghans Website or in the new Junghans E-magazine. You can access the magazine via the QR-codes – or visit us directly at www.junghans-magazine.com. 2 Content Foreword P.05 P.06 Personality P.08 Junghans Meister P.10 Meister Signatur Handaufzug Edition 160 P.14 Meister Gangreserve Edition 160 P.24 Meister fein Automatic P.38 Meister S Chronoscope Platin Edition 160 P. 44 Legends of time P.54 1972 Automatic FIS Edition P.58 JUNGHANS max bill P.64 max bill Edition Set 60 P .84 Junghans FORM P .88 FORM A Edition 160 P.96 P.102 Force, Spektrum, Milano P.124 Collection overview Milestones 3 160 years of Junghans: Now is precisely the right time to be focussing more on what embodies the Junghans Yesterday. brand – beautifully designed watches. Our anniversary models exemplify most impressively our work from Today. For yesterday, of today and for generations to come. For example, the Meister Signatur Handaufzug Edition generations 160 with its classic movement, which this year epito- to come. mises our tradition in watch making like no other. Or the FORM A Edition 160 combining the latest style and Junghans. technology with our home, the Black Forest. The future is represented by the Meister fein, providing the Meister series with a new, modern geometry. Join us on our journey into the future! 4 5 Every hand tells its own story. Hands are part of our personality. -

Grandfathers' Clocks: Their Making and Their Makers in Lancaster County *
Grandfathers' Clocks: Their Making and Their Makers in Lancaster County * By D. F. MAGEE, ESQ. Whilst Lancaster County is not the first or only home of the so-called "Grandfathers' Clock," yet the extent and the excellence of the clock industry in this type of clocks entitle our county to claim special distinction as one of the most noted centres of its production. I, therefore, feel the story of it specially worthy of an enduring place in our annals, and it is with pleasure and patriotic enthusiasm that I devote the time and research necessary to do justice to the subject that so closely touches the dearest traditions of our old county's social life and surroundings. These old clocks, first bought and used by the forefathers of many of us, have stood for a century or more in hundreds of our homes, faithfully and tirelessly marking the flight of time, in annual succession for four genera- tions of our sires from the cradle to the grave. Well do they recall to memory and imagination the joys and sorrows, the hopes and disappointments, the successes and failures, the loves and the * A second edition of this paper was necessitated by an increasing demand for the pamphlet, long gone from the files of the Historical Society. No at- tempt has been made to re-edit the text. D. F. Magee's sentences, punctuations and all are his own. A few errors of dates or spelling have been corrected, and a few additions have been made. These include the makers, Christian Huber, Henry L. -

Collectable POCKET Watches 1750-1920
cOLLECTABLE POCKET watches 1750-1920 Ian Beilby Clocks Magazine Beginner’s Guide Series No 5 cOLLECTABLE POCKET watches 1750-1920 Ian Beilby Clocks Magazine Beginner’s Guide Series No 5 Published by Splat Publishing Ltd. 141b Lower Granton Road Edinburgh EH5 1EX United Kingdom www.clocksmagazine.com © 2017 Ian Beilby World copyright reserved ISBN: 978-0-9562732-4-6 The right of Ian Beilby to be identified as author of this work has been asserted in accordance with the Copyright, Designs and Patents Act 1988. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the publisher. 2 4 6 8 10 9 7 5 3 1 Printed by CBF Cheltenham Business Forms Ltd, 67 Hatherley Road, Cheltenham GL51 6EG CONTENTS Introduction 7 Chapter 1. The eighteenth century verge watch 13 Chapter 2. The nineteenth century verge watch 22 Chapter 3. The English cylinder and rack lever watch 36 Chapter 4. The English lever watch 42 Chapter 5. The Swiss lever watch 54 Chapter 6. The American lever watch 62 Chapter 7. The Swiss cylinder ladies’ fob watch 72 Chapter 8. Advice on collecting and maintenance 77 Appendix 1. Glossary 82 Appendix 2. Further reading 86 CLOCKS MAGAZINE BEGINNER’S GUIDE SERIES No. 1. Clock Repair, A Beginner’s Guide No. 2. Beginner’s Guide to Pocket Watches No. 3. American Clocks, An Introduction No. 4. What’s it Worth, Price Guide to Clocks 2014 No. -

Physics 2305 Lab 11: Torsion Pendulum
Name___________________ ID number_________________________ Date____________________ Lab partner_________________________ Lab CRN________________ Lab instructor_______________________ Physics 2305 Lab 11: Torsion Pendulum Objective 1. To demonstrate that the motion of the torsion pendulum satisfies the simple harmonic form in equation (3) 2. To show that the period (or angular frequency) of the simple harmonic motion of the torsion pendulum is independent of the amplitude of the motion 3. To make measurements to demonstrate the validity of equation (6), which relates the angular frequency of motion to the torsion constant and the moment of inertia of the torsion pendulum Useful background reading Young and Freedman, section 13.1, 13.2, 13.4 (the “angular SHM” section, specifically) Introduction A torsion pendulum is shown schematically to the right. A disk with moment of inertia I0 is fastened near the center of a long straight wire stretched between two fixed mounts. If the disk is rotated through an angle θ and released, the twist in the wire rotates the disk back toward equilibrium. It overshoots and I 0 oscillates back and forth like a pendulum, hence the name. Torsion pendulums are used for the timing element in some θ clocks. The most common variety is a decorative polished brass mechanism under a glass dome. You may have seen one. The balance wheel in an old fashioned mechanical watch is a kind of torsion pendulum, though the restoring force is provided by a flat coiled spring rather than a long twisted wire. Torsion pendulums can be made very accurate and have been used in numerous precision experiments in 1 physics. -

Vleeuwen on Van Call
© 2013 Antiquarian Horological Society. Reproduction prohibited without permission. MARCH 2013 Jan van Call and the age of the pendulum clock in the Netherlands Pier van Leeuwen* The signature of Jan van Call, best known for his work on turret clocks, appears on a controversial wall clock that was the subject of a symposium held at the British Museum in 2011. At this symposium, the author sketched van Call’s documented biographical data against the colourful background of Anglo-Dutch history. This article, a much reduced version of that presentation, focuses on Van Call’s specific achievements and preserved heritage. From Kall to Nijmegen Brabant. The brass drum had twenty-four holes on one Jan van Call was born in Kall in the German Eifel and rule of about 45 cm. On 1 January 1647 Jan Becker moved to Batenburg near Nijmegen in the Dutch duchy Call was granted citizenship in the town of Nijmegen, of Guelders (since 1814 Province of Guelderland). This by which time he must have moved from Batenburg to old capital of the duchy had a rich medieval history, the capital. Amongst other constructional work he renowned among art historians as the birthplace of the produced pumps, drains and waterworks.3 Limburg brethren, court illuminators of at least two Books of Hours for the Duke of Berry. Nijmegen had an Repairing a monumental clock impressive medieval castle known as the Valkhof, once In the year in which he officially became a citizen of inhabited by emperor Charles V who made the old Nijmegen, Jan van Call repaired, for the fee of 280 duchy another part of his Habsburg realm. -

Evolution of Clock Escapement Mechanisms
Miodrag Stoimenov Associate Professor Evolution of Clock Escapement University of Belgrade Faculty of Mechanical Engineering Mechanisms Branislav Popkonstantinović Associate Professor The paper presents and explains the evolution of details design of the clock University of Belgrade escapement mechanisms through the ages. As particularly significant, the Faculty of Mechanical Engineering following mechanisms are emphasized: the crown wheel (verge & foliot), Ljubomir Miladinović anchor recoil, deadbeat and detached escapements, and their variations – Associate Professor gravity and chronometer escapements, as well as the English and Swiss University of Belgrade lever watch escapements. All important geometrical, kinematical and Faculty of Mechanical Engineering dynamical properties and the influence of these properties on the clock Dragan Petrović accuracy are explained. Associate Professor University of Belgrade Keywords: clock, escapement, evolution, mechanism, lever. Faculty of Mechanical Engineering 1. INTRODUCTION oscillator with the restoring force and standardized pace. The crown wheel rate, acted upon by driving torque, is This work is aimed at a qualitative analysis of regulated only by the foliot inertia with a rather advancement in escapement mechanism structural unpredictable error. When the crown wheel is rotating, definition and development of a timepiece over the past the pallet of the verge is caught by one of the wheel’s seven centuries. This study cowers the following issues teeth, rotating the verge and a solid foliot in one a) the crown wheel, the verge and foliot, b) the recoil direction and leading to engagement of the opposite anchor escapement, c) deadbeat escapements, and d) tooth with the second pallet [4]. Due to the foliot inertia, detached escapements. Measure of the effectiveness in that next tooth stops the wheel’s motion, and the wheel the regulator horological properties could be specified with its eigen driving torque finally stops the rotation of as follows: a) the level of constructive and dynamic the foliot too.