MIDAS: Lessons Learned from the First Spaceborne Atomic Force Microscope
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Austrian Space Law Newsletter
Austrian Space Law Newsletter Number 16 , June 2017 Editorial 2 Interview with Simonetta Di Pippo 3 The International Astronautical Congress (IAC) 6 Interview with Andreas Geisler 8 ”Big Data” at the Global Conference on Space and the Information Society (GLIS) 11 GLIS 11 Interview with David Kendall 13 NPOC Symposium ”Looking to the Future: Changing International Relations and Legal Issues Facing Space Activities” 17 Interview with Jean-Jacques Tortora 18 “Born to Explore”: the 29th Planetary Congress of the Association of Space Explorers 20 Interview with Franz Viehböck 23 Space Law at the Vienna Humanities Festival 26 “Born to Explore” 20 Women in Aerospace Europe: Vienna Local Group Launch Event 27 Manfred Lachs Space Law Moot Court Competition 2016 28 25th ECSL Summer Course on Space Law and Policy 2016 29 NPOC Space Law Austria Subpoint Graz Outreach Activities 2016 30 Seminar on Space Law and Space Policy at the University of Graz 2016 30 Humanities Festival 26 Upcoming Events 31 EDITORIAL Irmgard Marboe The year 2017 marks the 50th Viehböck, the first and only Austrian astronaut, at the margins anniversary of the legal foun- of the 29th Planetary Congress of the Association of Space dation of international space Explorers which took place in Austria in autumn 2016, shares law, the Outer Space Treaty. experiences and perspectives 25 years after the Austromir Opened for signature on 27 mission with Cordula Steinkogler who did not only conduct January 1967, it entered into all the interviews but was also in the ÖWF (Österreichisches force on 10 October in the Weltraum Forum) organising team of the Planetary Congress. -

How a Cartoon Series Helped the Public Care About Rosetta and Philae 13 How a Cartoon Series Helped the Public Care About Rosetta and Philae
How a Cartoon Series Helped the Public Care about Best Practice Rosetta and Philae Claudia Mignone Anne-Mareike Homfeld Sebastian Marcu Vitrociset Belgium for European Space ATG Europe for European Space Design & Data GmbH Agency (ESA) Agency (ESA) [email protected] [email protected] [email protected] Carlo Palazzari Emily Baldwin Markus Bauer Design & Data GmbH EJR-Quartz for European Space Agency (ESA) European Space Agency (ESA) [email protected] [email protected] [email protected] Keywords Karen S. O’Flaherty Mark McCaughrean Outreach, space science, public engagement, EJR-Quartz for European Space Agency (ESA) European Space Agency (ESA) visual storytelling, fairy-tale, cartoon, animation, [email protected] [email protected] anthropomorphising Once upon a time... is a series of short cartoons1 that have been developed as part of the European Space Agency’s communication campaign to raise awareness about the Rosetta mission. The series features two anthropomorphic characters depicting the Rosetta orbiter and Philae lander, introducing the mission story, goals and milestones with a fairy- tale flair. This article explores the development of the cartoon series and the level of engagement it generated, as well as presenting various issues that were encountered using this approach. We also examine how different audiences responded to our decision to anthropomorphise the spacecraft. Introduction internet before the spacecraft came out of exciting highlights to come, using the fairy- hibernation (Bauer et al., 2016). The four tale narrative as a base. The hope was that In late 2013, the European Space Agency’s short videos were commissioned from the video would help to build a degree of (ESA) team of science communicators the cross-media company Design & Data human empathy between the public and devised a number of outreach activ- GmbH (D&D). -

Balloon Powered Phoenix Mars Lander Model (Simplified Version)
balloon powered Phoenix Mars Lander Model (simplified version) by Steve Widmark Mountain View High School, Mountain View, CA What is Phoenix? Phoenix is NASA’s latest mission to Mars. Launched on a Delta II rocket on August 4 th , 2007, the Phoenix lander will touch down in the northern region of Mars on May 25, 2008. Once there, it will dig into the Martian permafrost using a robotic arm and analyze the composition of the soil and ice it removes with a sophisticated automated laboratory. In a nutshell, the goal of the mission is to determine if the Martian surface is (or was) capable of supporting life. Unlike the previous rover missions to Mars that made bounce landings using air bags, Phoenix will make a powered landing employing twelve thrusters positioned around the spacecraft. The model demonstrates this method of landing with a single balloon “thruster.” For more information about the Phoenix mission go to http://phoenix.lpl.arizona.edu Materials and tools: 1 parts sheet color printed on 110 lb (#110) card stock 1 balloon (lander flies best with a 5” balloon) 1 small paper clip clear tape glue sick or white glue scissors pencil Directions: Note: If the directions tell you to bend a tab down, this means to bend the tab down with the printed portion of the part facing up. If the directions tell you to bend a tab up, this means to bend the tab up with the printed portion of the part facing up. The front side of a part is the side with the printing. -
Handheld Microscope Users Guide
Handheld Microscope Users Guide www.ScopeCurriculum.com ii Handheld Microscope Users Guide Hand-Held Microscope User’s Guide Table of Contents INTRODUCTION ..................................................................................................................................1 What is a Scope-On-A-Rope? .....................................................................................................1 Which model do you have?.........................................................................................................2 Analog vs. Digital .........................................................................................................................3 Where can I buy a SOAR? ...........................................................................................................3 NEW SCOPE-ON-A-ROPE..................................................................................................................4 Parts and Assembly of SOAR .....................................................................................................4 Connections .................................................................................................................................5 Turning It On.................................................................................................................................5 Comparing and Installing Lenses...............................................................................................6 How to Use and Capture Images with the 30X Lens.................................................................7 -

Institutional Patterns in the Austrian Space Sector Wong, Annie; Van Burg, Elco; Giannopapa, Christina
VU Research Portal Institutional patterns in the Austrian space sector Wong, Annie; van Burg, Elco; Giannopapa, Christina published in Acta astronautica 2018 DOI (link to publisher) 10.1016/j.actaastro.2017.10.030 document version Publisher's PDF, also known as Version of record document license Article 25fa Dutch Copyright Act Link to publication in VU Research Portal citation for published version (APA) Wong, A., van Burg, E., & Giannopapa, C. (2018). Institutional patterns in the Austrian space sector. Acta astronautica, 142, 201-211. https://doi.org/10.1016/j.actaastro.2017.10.030 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal ? Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. E-mail address: [email protected] Download date: 02. Oct. 2021 Acta Astronautica 142 (2018) 201–211 Contents lists available at ScienceDirect Acta Astronautica journal -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -
The Microscope Parts And
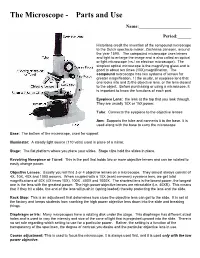
The Microscope Parts and Use Name:_______________________ Period:______ Historians credit the invention of the compound microscope to the Dutch spectacle maker, Zacharias Janssen, around the year 1590. The compound microscope uses lenses and light to enlarge the image and is also called an optical or light microscope (vs./ an electron microscope). The simplest optical microscope is the magnifying glass and is good to about ten times (10X) magnification. The compound microscope has two systems of lenses for greater magnification, 1) the ocular, or eyepiece lens that one looks into and 2) the objective lens, or the lens closest to the object. Before purchasing or using a microscope, it is important to know the functions of each part. Eyepiece Lens: the lens at the top that you look through. They are usually 10X or 15X power. Tube: Connects the eyepiece to the objective lenses Arm: Supports the tube and connects it to the base. It is used along with the base to carry the microscope Base: The bottom of the microscope, used for support Illuminator: A steady light source (110 volts) used in place of a mirror. Stage: The flat platform where you place your slides. Stage clips hold the slides in place. Revolving Nosepiece or Turret: This is the part that holds two or more objective lenses and can be rotated to easily change power. Objective Lenses: Usually you will find 3 or 4 objective lenses on a microscope. They almost always consist of 4X, 10X, 40X and 100X powers. When coupled with a 10X (most common) eyepiece lens, we get total magnifications of 40X (4X times 10X), 100X , 400X and 1000X. -

SGAC-Annual-Report-2014.Pdf
ANNUAL REPORT SPACE GENERATION ADVISORY COUNCIL 2014 In support of the United Nations Programme on Space Applications A. TABLE OF CONTENTS A. Table of Contents 2 In support of the United Nations Programme B. Sponsors and Partners 4 on Space Applications 1. Introduction 10 1.1 About the SGAC 12 14 c/o European Space Policy Institute (ESPI) 1.2 Letter from the Co-chairs 15 Schwarzenbergplatz 6 1.3 Letter from the Executive Director 16 Vienna A-1030 1.4 SGAC output at a glance AUSTRIA 2. SGAC Background 22 2.1 History of the SGAC 24 26 [email protected] 2.2 Leadership and Structure 27 www.spacegeneration.org 2.3 Programme +41 1 718 11 18 30 3. The organisation in 2014 30 32 +43 1 718 11 18 99 3.1 Goal Achievement Review 3.2 SGAC Activity Highlights 36 42 © 2015 Space Generation Advisory Council 3.3 Space Generation Fusion Forum Report 3.4 Space Generation Congress Report 50 3.5 United Nations Report 62 3.6 SGAC Regional Workshops 66 3.7 SGAC Supported Events 68 3.8 Financial Summary 72 Acknowledgements 4. Projects 78 4.1 Project Outcomes and Highlights 80 The SGAC 2014 Annual Report was compiled and 4.2 Space Technologies for Disaster Management Project Group 81 edited by Minoo Rathansabapathy (South Africa/ 4.3 Near Earth Objects Project Group 82 Australia), Andrea Jaime (Spain), Laura Rose (USA) 4.4 Space Law and Policy Project Group 84 and Arno Geens (Belgium) with the assistance of 4.5 Commercial Space Project Group 86 Candice Goodwin (South Africa), Justin Park (USA), 4.6 Space Safety and Sustainability Project Group 88 Nikita Marwaha (United Kingdom), Dario Schor 4.7 Small Satellites Project Group 90 (Argentina/Canada), Leo Teeney (UK) and Abhijeet 4.8 Space Exploration Project Group 92 Kumar (Australia) in editing. -

Chapter 11 Applications of Ore Microscopy in Mineral Technology
CHAPTER 11 APPLICATIONS OF ORE MICROSCOPY IN MINERAL TECHNOLOGY 11.1 INTRODUCTION The extraction of specific valuable minerals from their naturally occurring ores is variously termed "ore dressing," "mineral dressing," and "mineral beneficiation." For most metalliferous ores produced by mining operations, this extraction process is an important intermediatestep in the transformation of natural ore to pure metal. Although a few mined ores contain sufficient metal concentrations to require no beneficiation (e.g., some iron ores), most contain relatively small amounts of the valuable metal, from perhaps a few percent in the case ofbase metals to a few parts per million in the case ofpre cious metals. As Chapters 7, 9, and 10ofthis book have amply illustrated, the minerals containing valuable metals are commonly intergrown with eco nomically unimportant (gangue) minerals on a microscopic scale. It is important to note that the grain size of the ore and associated gangue minerals can also have a dramatic, and sometimes even limiting, effect on ore beneficiation. Figure 11.1 illustrates two rich base-metal ores, only one of which (11.1b) has been profitably extracted and processed. The McArthur River Deposit (Figure I 1.1 a) is large (>200 million tons) and rich (>9% Zn), but it contains much ore that is so fine grained that conventional processing cannot effectively separate the ore and gangue minerals. Consequently, the deposit remains unmined until some other technology is available that would make processing profitable. In contrast, the Ruttan Mine sample (Fig. 11.1 b), which has undergone metamorphism, is relativelycoarsegrained and is easily and economically separated into high-quality concentrates. -

Science for Energy Technology: Strengthening the Link Between Basic Research and Industry
ďŽƵƚƚŚĞĞƉĂƌƚŵĞŶƚŽĨŶĞƌŐLJ͛ƐĂƐŝĐŶĞƌŐLJ^ĐŝĞŶĐĞƐWƌŽŐƌĂŵ ĂƐŝĐŶĞƌŐLJ^ĐŝĞŶĐĞƐ;^ͿƐƵƉƉŽƌƚƐĨƵŶĚĂŵĞŶƚĂůƌĞƐĞĂƌĐŚƚŽƵŶĚĞƌƐƚĂŶĚ͕ƉƌĞĚŝĐƚ͕ĂŶĚƵůƟŵĂƚĞůLJĐŽŶƚƌŽů ŵĂƩĞƌĂŶĚĞŶĞƌŐLJĂƚƚŚĞĞůĞĐƚƌŽŶŝĐ͕ĂƚŽŵŝĐ͕ĂŶĚŵŽůĞĐƵůĂƌůĞǀĞůƐ͘dŚŝƐƌĞƐĞĂƌĐŚƉƌŽǀŝĚĞƐƚŚĞĨŽƵŶĚĂƟŽŶƐ ĨŽƌŶĞǁĞŶĞƌŐLJƚĞĐŚŶŽůŽŐŝĞƐĂŶĚƐƵƉƉŽƌƚƐKŵŝƐƐŝŽŶƐŝŶĞŶĞƌŐLJ͕ĞŶǀŝƌŽŶŵĞŶƚ͕ĂŶĚŶĂƟŽŶĂůƐĞĐƵƌŝƚLJ͘dŚĞ ^ƉƌŽŐƌĂŵĂůƐŽƉůĂŶƐ͕ĐŽŶƐƚƌƵĐƚƐ͕ĂŶĚŽƉĞƌĂƚĞƐŵĂũŽƌƐĐŝĞŶƟĮĐƵƐĞƌĨĂĐŝůŝƟĞƐƚŽƐĞƌǀĞƌĞƐĞĂƌĐŚĞƌƐĨƌŽŵ ƵŶŝǀĞƌƐŝƟĞƐ͕ŶĂƟŽŶĂůůĂďŽƌĂƚŽƌŝĞƐ͕ĂŶĚƉƌŝǀĂƚĞŝŶƐƟƚƵƟŽŶƐ͘ ďŽƵƚƚŚĞ͞ĂƐŝĐZĞƐĞĂƌĐŚEĞĞĚƐ͟ZĞƉŽƌƚ^ĞƌŝĞƐ KǀĞƌƚŚĞƉĂƐƚĞŝŐŚƚLJĞĂƌƐ͕ƚŚĞĂƐŝĐŶĞƌŐLJ^ĐŝĞŶĐĞƐĚǀŝƐŽƌLJŽŵŵŝƩĞĞ;^ͿĂŶĚ^ŚĂǀĞĞŶŐĂŐĞĚ ƚŚŽƵƐĂŶĚƐŽĨƐĐŝĞŶƟƐƚƐĨƌŽŵĂĐĂĚĞŵŝĂ͕ŶĂƟŽŶĂůůĂďŽƌĂƚŽƌŝĞƐ͕ĂŶĚŝŶĚƵƐƚƌLJĨƌŽŵĂƌŽƵŶĚƚŚĞǁŽƌůĚƚŽƐƚƵĚLJ ƚŚĞĐƵƌƌĞŶƚƐƚĂƚƵƐ͕ůŝŵŝƟŶŐĨĂĐƚŽƌƐ͕ĂŶĚƐƉĞĐŝĮĐĨƵŶĚĂŵĞŶƚĂůƐĐŝĞŶƟĮĐďŽƩůĞŶĞĐŬƐďůŽĐŬŝŶŐƚŚĞǁŝĚĞƐƉƌĞĂĚ ŝŵƉůĞŵĞŶƚĂƟŽŶŽĨĂůƚĞƌŶĂƚĞĞŶĞƌŐLJƚĞĐŚŶŽůŽŐŝĞƐ͘dŚĞƌĞƉŽƌƚƐĨƌŽŵƚŚĞĨŽƵŶĚĂƟŽŶĂůĂƐŝĐZĞƐĞĂƌĐŚEĞĞĚƐƚŽ ƐƐƵƌĞĂ^ĞĐƵƌĞŶĞƌŐLJ&ƵƚƵƌĞǁŽƌŬƐŚŽƉ͕ƚŚĞĨŽůůŽǁŝŶŐƚĞŶ͞ĂƐŝĐZĞƐĞĂƌĐŚEĞĞĚƐ͟ǁŽƌŬƐŚŽƉƐ͕ƚŚĞƉĂŶĞůŽŶ 'ƌĂŶĚŚĂůůĞŶŐĞƐĐŝĞŶĐĞ͕ĂŶĚƚŚĞƐƵŵŵĂƌLJƌĞƉŽƌƚEĞǁ^ĐŝĞŶĐĞĨŽƌĂ^ĞĐƵƌĞĂŶĚ^ƵƐƚĂŝŶĂďůĞŶĞƌŐLJ&ƵƚƵƌĞ ĚĞƚĂŝůƚŚĞŬĞLJďĂƐŝĐƌĞƐĞĂƌĐŚŶĞĞĚĞĚƚŽĐƌĞĂƚĞƐƵƐƚĂŝŶĂďůĞ͕ůŽǁĐĂƌďŽŶĞŶĞƌŐLJƚĞĐŚŶŽůŽŐŝĞƐŽĨƚŚĞĨƵƚƵƌĞ͘dŚĞƐĞ ƌĞƉŽƌƚƐŚĂǀĞďĞĐŽŵĞƐƚĂŶĚĂƌĚƌĞĨĞƌĞŶĐĞƐŝŶƚŚĞƐĐŝĞŶƟĮĐĐŽŵŵƵŶŝƚLJĂŶĚŚĂǀĞŚĞůƉĞĚƐŚĂƉĞƚŚĞƐƚƌĂƚĞŐŝĐ ĚŝƌĞĐƟŽŶƐŽĨƚŚĞ^ͲĨƵŶĚĞĚƉƌŽŐƌĂŵƐ͘;ŚƩƉ͗ͬͬǁǁǁ͘ƐĐ͘ĚŽĞ͘ŐŽǀͬďĞƐͬƌĞƉŽƌƚƐͬůŝƐƚ͘ŚƚŵůͿ ϭ ^ĐŝĞŶĐĞĨŽƌŶĞƌŐLJdĞĐŚŶŽůŽŐLJ͗^ƚƌĞŶŐƚŚĞŶŝŶŐƚŚĞ>ŝŶŬďĞƚǁĞĞŶĂƐŝĐZĞƐĞĂƌĐŚĂŶĚ/ŶĚƵƐƚƌLJ Ϯ EĞǁ^ĐŝĞŶĐĞĨŽƌĂ^ĞĐƵƌĞĂŶĚ^ƵƐƚĂŝŶĂďůĞŶĞƌŐLJ&ƵƚƵƌĞ ϯ ŝƌĞĐƟŶŐDĂƩĞƌĂŶĚŶĞƌŐLJ͗&ŝǀĞŚĂůůĞŶŐĞƐĨŽƌ^ĐŝĞŶĐĞĂŶĚƚŚĞ/ŵĂŐŝŶĂƟŽŶ ϰ ĂƐŝĐZĞƐĞĂƌĐŚEĞĞĚƐĨŽƌDĂƚĞƌŝĂůƐƵŶĚĞƌdžƚƌĞŵĞŶǀŝƌŽŶŵĞŶƚƐ ϱ ĂƐŝĐZĞƐĞĂƌĐŚEĞĞĚƐ͗ĂƚĂůLJƐŝƐĨŽƌŶĞƌŐLJ -
Austrian Technology in Space
2017/08 Austrian Technology in Space An Overview of Austrian Space Industry and Research Federal Ministry for Transport, Innovation and Technology Austrian Technology in Space 1 Space Industry Austrian Technology in Space Space Industry 2 Austrian Technology in Space Austrian Technology in Space 3 Space Industry Contents Preface 5 Austria in Space 8 Austrospace 20 Aeronautics and Space Agency 21 Space Industry 23 Products and Services 24 Industry from A – Z 26 Space Research 87 Research Topics 88 Research Institutes from A – Z 90 Austrian Competences 119 Index 136 Preface With this brochure the Ministry of Transport, Innovation and Technology presents Austrian companies and research institutes, their research areas, competencies, products and services with the goal to increase the international visibility and to support networking of national and international players. Austrian space activities are supported by the Ministry through the Austrian Space Applications Programme (ASAP) as well as through membership in international organisations such as the European Space Agency (ESA) and through EU programmes, such as Copernicus and Galileo. The Ministry invites all Austrian companies, research organisations and institutes involved in space technology, which are not yet listed on www.spacetechnology.at, to register and present themselves on the web portal. Space Industry 6 Austrian Technology in Space Austrian Technology in Space 7 Space Industry Every day of my life is a day on earth and in the universe. It’s good to know that my support comes from far, far away – and Austrian technology helps make it happen! Intro 8 Austrian Technology in Space Austria in Space Austria is an active player Austria is a recognized partner in the space world. -
Microscope Innovation Issue Fall 2020
Masks • COVID-19 Testing • PAPR Fall 2020 CHIhealth.com The Innovation Issue “Armor” invention protects test providers 3D printing boosts PPE supplies CHI Health Physician Journal WHAT’S INSIDE Vol. 4, Issue 1 – Fall 2020 microscope is a journal published by CHI Health Marketing and Communications. Content from the journal may be found at CHIhealth.com/microscope. SUPPORTING COMMUNITIES Marketing and Communications Tina Ames Division Vice President Making High-Quality Masks 2 for the Masses Public Relations Mary Williams CHI Health took a proactive approach to protecting the community by Division Director creating and handing out thousands of reusable facemasks which were tested to ensure they were just as effective after being washed. Editorial Team Sonja Carberry Editor TACKLING CHALLENGES Julie Lingbloom Graphic Designer 3D Printing Team Helps Keep Taylor Barth Writer/Associate Editor 4 PAPRs in Use Jami Crawford Writer/Associate Editor When parts of Powered Air Purifying Respirators (PAPRS) were breaking, Anissa Paitz and reordering proved nearly impossible, a team of creators stepped in with a Writer/Associate Editor workable prototype that could be easily produced. Photography SHARING RESOURCES Andrew Jackson Grassroots Effort Helps Shield 6 Nebraska from COVID-19 About CHI Health When community group PPE for NE decided to make face shields for health care providers, CHI Health supplied 12,000 PVC sheets for shields and CHI Health is a regional health network headquartered in Omaha, Nebraska. The 119 kg of filament to support their efforts. combined organization consists of 14 hospitals, two stand-alone behavioral health facilities, more than 150 employed physician ADVANCING CAPABILITIES practice locations and more than 12,000 employees in Nebraska and southwestern Iowa.