Emergent Effects of Multiple Predators on Prey Survival: the Importance of Depletion and the Functional Response
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Board of Advisors Vote Confidence
Glenville State College .erruru ·Pioneering into the 21 st century one page at a time.· per to be Featured Board of Advisors Wheeling Symphony Vote Confidence Gralumt long and prosperous one. Under by Holly A. Willcewitz October 4 at 7 p.m. the the direction ofMaestra Worby, The Glenville State Col in the Fine Arts the symphony has experienced lege Board of Advisors voted will again experience substantial growth. During the unanimous confidence in the Hnllndll and textures of the 1994-1995 concert season, the leadership of President Wil &Om the Wheeling Sym orchestra offers its audience a liam K. Simmons last Thurs Orchestra. The sym fi~cert classical series, a day. under the direction of three~cert pops series, "The According to member Vinmwl's FiIst Lady Mae Nutcracker," four Young Janet James, athletic trainer, the Racbael Worby, performs a People's Concerts and two free DeIfUII'ellS Cooper decision was made after a IIIttriolic concert tit1~ "God summer concerts. 1994 marks lengthy discussion over recent America." The stirring se Worby's ninth season as musi ofNew York at Potsdam, for her controversies. The minutes, of pieces will include cal director and conductor ofthe work in the field of music and which are pending approval until Dr. W.uilUll K. Si",,,,ons Broadway and movie se Wheeling Symphony. which is education. the next meeting, listed the "di- as well as spiritual the oldest cuJtural institution in The symphony is very rection set forth in the Strategic Plan, Campus Master Plan and the West Vuginia. pleased to be sharing the stage State of the College Address" as being the determining factors in Demarcus Cooper, a so Worby is also the musical with such a talent as Demarcus the vote. -

Record-High Grain Prices Bolster Rural Economy
SATURDAY MARCH 8 6 PM 6:30 7 PM 7:30 8 PM 8:30 9 PM 9:30 10 PM 10:30 11 PM 11:30 KLBY/ABC News (N) Kake Movie: Road to Perdition TTT (2002, Crime Drama) A mobster News (N) American Idol Enter- H h (CC) News seeks vengeance during the Depression. Tom Hanks. (CC) (CC) Rewind Top 8 to 7 tainment KSNK/NBC News (N) Wheel of Law & Order: Law & Order: SVU Law & Order Quit News (N) Saturday Night Live (N) (CC) SATURDAYL j Fortune Criminal Intent Claim (CC) MARCH 8 KBSL/CBS News (N) Paid CSI: NY Heart of 48 Hours Mystery (CC) News (N) M*A*S*H Without a Trace He 1< NX (CC) Program Glass (CC) (CC) (CC) Saw, She Saw (CC) K15CG Pioneers6 PM of 6:30 The7 POsmondsM 7:30 50th Anniversary8 PM Reunion8:30 Peter,9 PM Bethany9:30 & Rufus:10 SpiritPM of10:30 Soundstage11 PM 11:30 d Television Sitcoms (CC) Woodstock (CC) Garbage (CC) KLBY/ABCESPN (5:00)News (N)SportsCenterKake CollegeMovie: Road GameDay to PerditionCollege TTT Basketball (2002, Crime: North Drama) Carolina A mobster at SportsCenterNews (N) American (Live) IdolMidnight Fast-Enter- HO_h (Live)(CC) (CC)News (Live)seeks (CC)vengeance duringDuke. the Depression.(Live) (CC) Tom Hanks. (CC) (CC) Rewind TopMadness 8 to 7 breaktainment KSNK/NBCUSA (4:30)News (N)Movie:Wheel The of Law & Order: SVU Law & Order: SVU Law & Order:Order Quit SVU NewsLaw & (N) Order:Saturday NightMovie: Live Friday (N) (CC) After LP^j Bone CollectorFortune Criminal Intent Claim (CC) Criminal Intent Next TZ (2002) KBSL/CBSTBS News(5:00) (N)Movie:Paid CSI:Movie: NY Bad Heart News of Bears48 HoursTTZ (2005, Mystery (CC)Movie: The Mask TTTNews (1994) (N) AnM*A*S*H ancient WithoutMovie: Snow a Trace Day He 1<P_NX (CC)Kicking & ScrmProgram GlassComedy) (CC) Billy Bob Thornton, Greg Kinnear. -

Aliens, Predators and Global Issues: the Evolution of a Narrative Formula
CULTURA , LENGUAJE Y REPRESENTACIÓN / CULTURE , LANGUAGE AND REPRESENTATION ˙ ISSN 1697-7750 · VOL . VIII \ 2010, pp. 43-55 REVISTA DE ESTUDIOS CULTURALES DE LA UNIVERSITAT JAUME I / CULTURAL STUDIES JOURNAL OF UNIVERSITAT JAUME I Aliens, Predators and Global Issues: The Evolution of a Narrative Formula ZELMA CATALAN SOFIA UNIVERSITY ABSTRACT : The article tackles the genre of science fiction in film by focusing on the Alien and Predator series and their crossover. By resorting to “the fictional worlds” theory (Dolezel, 1998), the relationship between the fictional and the real is examined so as to show how these films refract political issues in various symbolic ways, with special reference to the ideological construct of “global threat”. Keywords: film, science fiction, narrative, allegory, otherness, fictional worlds. RESUMEN : en este artículo se aborda el género de la ciencia ficción en el cine mediante el análisis de las películas de la serie Alien y Predator y su combinación. Utilizando la teoría de “los mundos ficcionales” (Dolezel, 1999), se examina la relación entre los planos ficcional y real para mostrar cómo estas películas reflejan cuestiones políticas de diversas formas simbólicas, con especial referencia a la construccción ideológica de la “amenaza global”. Palabras clave: film, ciencia ficción, narrativa, alegoría, alteridad, mundos fic- cionales In 2004 20th Century Fox released Alien vs. Predator, directed by Paul Anderson and starring Sanaa Latham, Lance Henriksen, Raoul Bova and Ewen Bremmer. The film combined and continued two highly successful film series: those of the 1979 Alien and its three successors Aliens (1986), Alien 3 (1992) and Alien Resurrection (1997), and of the two Predator movies, from 1987 and 1990 respectively. -

Predator 2 Script
IIPREDATOR 2II The Hunt Continues... Written by Jim Thomas & John Thomas SECOND DRAFT Decernber 15, 1989 'IPREDATOR 2:II The Hunt Continues... SLOW FADE-IN FROM BI,ACK: OPENING TTTLE SEQUENCE RUSHING FORWARD at ground Ievel, mottled shapes racing past camera, slowly resolving into trees whipping past, CAMERA RISING through the trees into an AERfAL VfEW, speeding on, looking down on a jungle canopy. We slow and CRANE UP, cresting the treeline, the startling sight of the LOS ANGELES BASIN, appearing before us. SUBTITLES: LOS ANGELES, ]-995 Title artwork crashes into center screen: PREDATOR 2. On thi-s the TITT,E BLEEDS INTO: PREDATOR VTSTON OF LOS ANGELES Scanning the skyline. Attracted by a strange, distant SOUND, his vision STEPS fN, downward, through the canyons of steel, the distorted WHINE of a SIREN, growing louder as the Predator's vision ZOOMS IN to the streets below, coming to rest on a bizarre scene: a loping YELLOW wave of FLAME, accompanied by distorted SOUNDS of CRACKLING and POPPfNG, blood-red STREAKS of LIGHT darting across the street, holding and fading for a second. EXT. OB.]ECTIVE CAIVIERA . HIGH ANGLE - MIDSTREET DAY The keening WAIL growing louder as we DESCEND through the thick smog and shirnmering ai-r of a blistering heat-wave; i.nto the rnidst of a raging BATTLEFIELD: At the mouth of a blind aIIey, a BOB-TAIL TRUCK Iies BURNING on its side, a late-mode1 CADfLLAC positioned before it, nose-first onto the sidewalk. Behind the truck, TEN MEN, heavily armed with AUTOMATIC RIFLES and SHOTGUNS, lay down a barrage of GUNFIRE, aimed at EIGHT POLICEMEN across the street, pinned down in doorways, stairwell-s and behind cars. -

MGM-AVP-3Rd Pages
S CHOLASTIC READERS A FREE RESOURCE FOR TEACHERS! ALIEN vs. Predator –– Extra Level 2 This level is suitable for students who have been learning English for at least two years and up to three years. It corresponds with the Common European Framework level A2. Suitable for users of CROWN/TEAM magazine. SYNOPSIS the world in the popular film Predator: These alien Predators A wealthy corporation, Weyland Industries, discovers a mysterious came to Earth specifically to hunt for prey. This successful film pyramid deep under the ice of the Antarctic; and the owner, spawned a sequel, Predator 2, set in Los Angeles. Charles Weyland, assembles a team to explore it. When they After Aliens and Predators met each other for the first time in enter the pyramid for the first time, an ancient alien machinery a Dark Horse Comics book, film company Twentieth Century is activated and an Alien Queen wakes and begins to lay eggs. Fox started developing scripts to bring both series together. Meanwhile three aliens of a different kind – Predators – have British director Paul W. S. Anderson wanted to set the film on come to the pyramid. As the humans try to escape the dangers present-day Earth, thereby setting it long before the action of of the pyramid, they discover the terrible truth: the pyramid was Alien. He wanted to feature a strong woman character in this built by the Predators centuries earlier as a place to breed film, too. Fans of the Alien series will notice that actor Lance Aliens and then hunt them as a test of their warrior status. -

Concerts for Kids
Concerts for Kids Study Guide 2014-15 San Francisco Symphony Davies Symphony Hall study guide cover 1415_study guide 1415 9/29/14 11:41 AM Page 2 Children’s Concerts – “Play Me A Story!” Donato Cabrera, conductor January 26, 27, 28, & 30 (10:00am and 11:30am) Rossini/Overture to The Thieving Magpie (excerpt) Prokofiev/Excerpts from Peter and the Wolf Rimsky-Korsakov/Flight of the Bumblebee Respighi/The Hen Bizet/The Doll and The Ball from Children’s Games Ravel/Conversations of Beauty and the Beast from Mother Goose Prokofiev/The Procession to the Zoo from Peter and the Wolf Youth Concerts – “Music Talks!” Edwin Outwater, conductor December 3 (11:30am) December 4 & 5 (10:00am and 11:30am) Mussorgsky/The Hut on Fowl’s Legs from Pictures at an Exhibition Strauss/Till Eulenspiegel’s Merry Pranks (excerpt) Tchaikovsky/Odette and the Prince from Swan Lake Kvistad/Gending Bali for Percussion Grieg/In the Hall of the Mountain King from Peer Gynt Britten/Storm from Peter Grimes Stravinsky/Finale from The Firebird San Francisco Symphony children’s concerts are permanently endowed in honor of Mrs. Walter A. Haas. Additional support is provided by the Mimi and Peter Haas Fund, the James C. Hormel & Michael P. NguyenConcerts for Kids Endowment Fund, Tony Trousset & Erin Kelley, and Mrs. Milton Wilson, together with a gift from Mrs. Reuben W. Hills. We are also grateful to the many individual donors who help make this program possible. San Francisco Symphony music education programs receive generous support from the Hewlett Foundation Fund for Education, the William Randolph Hearst Endowment Fund, the Agnes Albert Youth Music Education Fund, the William and Gretchen Kimball Education Fund, the Sandy and Paul Otellini Education Endowment Fund, The Steinberg Family Education Endowed Fund, the Jon and Linda Gruber Education Fund, the Hurlbut-Johnson Fund, and the Howard Skinner Fund. -

PDF Download Alien Vs. Predator Pdf Free Download
ALIEN VS. PREDATOR PDF, EPUB, EBOOK Michael Robbins | 74 pages | 17 May 2012 | Penguin Putnam Inc | 9780143120353 | English | New York, United States Alien Vs. Predator PDF Book Predator ". Set immediately after the events of the previous film, the Predalien hybrid aboard the Predator scout ship, having just separated from the mothership shown in the previous film, has grown to full adult size and sets about killing the Predators aboard the ship, causing it to crash in the small town of Gunnison, Colorado. In , Sega released a reboot, Aliens vs. The first featured Paul W. Predator: Requiem , directed by the Brothers Strause , and the development of a third film has been delayed indefinitely. Marines carry a wide arsenal including pulse rifles , flamethrowers, and auto-tracking smartguns. Archived from the original on December 19, Production began in late at Barrandov Studios in Prague, Czech Republic , where most of the filming took place. After the release of Alien 3 , Sigourney Weaver commented on her apparent exit from the franchise, joking that "they'd probably find a way to resurrect Ripley using the DNA in her fingernails". Soon, the team realize that only one species can win. No minimum to No maximum. However, the United States Marine Corps are humanity's last line of defense, and as such they are armed to the teeth with the very latest in high explosive and automatic weaponry. Main article: Alien vs. Chris Hewitt of Empire called it an "early but strong contender for worst movie of ". So there's nothing in this movie that contradicts anything that already exists. -

1. Adventures of Batman and Robin 2. Aladdin 3. Alex Kidd in the Enchanted Castle 4. Alien 3 5. Alien Storm 6. Altered Beast 7. Arcus Odyssey 8
1. Adventures of Batman and Robin 2. Aladdin 3. Alex Kidd In The Enchanted Castle 4. Alien 3 5. Alien Storm 6. Altered Beast 7. Arcus Odyssey 8. Ariel - The Little Mermaid 9. Arnold Palmer Tournament Golf 10. Arrow Flash 11. Atomic RoboKid 12. Batman 13. Batman Returns 14. Battleсity 15. Battle Squadron 16. Battletech 17. Battletoads 18. Battletoads and Double Dragon 19. Beauty and the Beast - Roar of the Beast 20. Bimini Run 21. Blades of Vengence 22. Bonanza Bros 23. Bubble And Squeak 24. Cadash 25. Captain America & Avengers 26. Capt’n Havoc 27. Castle of Illusion 28. Castlevania - Bloodlines 29. Championship Pro-Am 30.Cliffhanger 31. Columns 32. Columns III 33. Combat Cars 34. Contra - Hard Corps 35. Crack Down 36. Cyborg Justice 37. Dangerous Seed 38. Dark Castle 39. Desert Demolition 40. Desert Strike - Return to the Gulf 41. Dick Tracy 42. DinoLand 43. Dinosaurs for Hire 44. Doki Doki Penguin Land 45. Doom Troopers - The Mutant Chronicles 46. Double Dragon 47. Double Dragon II 48. Dragon - The Bruce Lee Story 49. Dune - The Battle for Arrakis 50. Dynamite Duke 51. Ecco the Dolphin 52. Elemental Master 53. ESWAT Cyber Police - City Under Siege 54. Fantasia 55. Fantastic Dizzy 56. Fatal Labyrinth 57. Fighting Masters 58. Fire Shark 59. Flashback - The Quest for Identity 60. Flicky 61. The Flintstones 62. Frogger 63. Gain Ground 64. General Chaos 65. Ghostbusters 66. Ghouls ‘N Ghosts 67. Gods 68. Golden Axe 69. Golden Axe 3 70. Granada 71. Greendog 72. Growl (Runark) 73. Gunstar Heroes 74. Hellfire 75. Home Alone 2 76. -
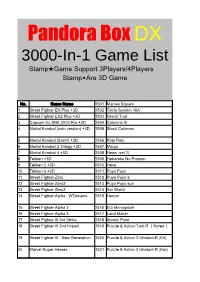
Pandora Box DX 3000-In-1 Games List
Pandora Box DX 3000-In-1 Game List Stamp★Game Support 3Players/4Players Stamp▲Are 3D Game No. Game Name 1501 Maniac Square 1 Street Fighter EX Plus ▲3D 1502 Tetris-System 16A 2 Street Fighter EX2 Plus ▲3D 1503 Grand Tour 3 Capcom Vs.SNK 2000 Pro ▲3D 1504 Columns III 4 Mortal Kombat (coin version) ▲3D 1505 Stack Columns 5 Mortal Kombat 2(set1) ▲3D 1506 Poto Poto 6 Mortal Kombat 3 Trilogy ▲3D 1507 Mouja 7 Mortal Kombat 4 ▲3D 1508 News (set 1) 8 Tekken ▲3D 1509 Hebereke No Popoon 9 Tekken 2 ▲3D 1510 Hexa 10 Tekken 3 ▲3D 1511 Puyo Puyo 11 Street Fighter Zero 1512 Puyo Puyo 2 12 Street Fighter Zero2 1513 Puyo Puyo sun 13 Street Fighter Zero3 1514 Xor World 14 Street Fighter Alpha : W'Dreams 1515 Hexion 15 Street Fighter Alpha 2 1516 Eto Monogatari 16 Street Fighter Alpha 3 1517 Land Maker 17 Street Fighter III 3rd Strike 1518 Atomic Point 18 Street Fighter III 2nd Impact 1519 Puzzle & Action:Tant-R (Korea) 19 Street Fighter III : New Generation 1520 Puzzle & Action 2 Ichidant-R (En) 20 Marvel Super Heroes 1521 Puzzle & Action 2 Ichidant-R (Kor) 21 Marvel Super Heroes Vs. St Fighter 1522 The Newzealand Story 22 Marvel Vs. Capcom : Super Heroes 1523 Puzzle Bobble 23 X-Men : Children oF the Atom 1524 Puzzle Bobble 2 24 X-Men Vs. Street Fighter 1525 Puzzle Bobble 3 25 Hyper Street Fighter II : AE 1526 Puzzle Bobble 4 26 Super Street Fighter II : New C 1527 Bust-A-Move Again 27 Super Street Fighter II Turbo 1528 Puzzle De Pon! 28 Super Street Fighter II X : GMC 1529 Dolmen 29 Street Fighter II : The World Warrior 1530 Magical Drop II 30 Street -

Spatial Partitioning of Predation Risk in a Multiple Predatorâ•Fimultiple Prey System
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln USDA National Wildlife Research Center - Staff U.S. Department of Agriculture: Animal and Publications Plant Health Inspection Service 2009 Spatial Partitioning of Predation Risk in a Multiple Predator–Multiple Prey System Todd C. Atwood Utah State University, Logan, Department of Wildland Resources Eric Gese USDA/APHIS/WS National Wildlife Research Center, [email protected] Kyran Kunkel Utah State University, Logan, Department of Wildland Resources Follow this and additional works at: https://digitalcommons.unl.edu/icwdm_usdanwrc Part of the Environmental Sciences Commons Atwood, Todd C.; Gese, Eric; and Kunkel, Kyran, "Spatial Partitioning of Predation Risk in a Multiple Predator–Multiple Prey System" (2009). USDA National Wildlife Research Center - Staff Publications. 871. https://digitalcommons.unl.edu/icwdm_usdanwrc/871 This Article is brought to you for free and open access by the U.S. Department of Agriculture: Animal and Plant Health Inspection Service at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in USDA National Wildlife Research Center - Staff Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Management and Conservation Article Spatial Partitioning of Predation Risk in a Multiple Predator–Multiple Prey System TODD C. ATWOOD,1 Department of Wildland Resources, Utah State University, Logan, UT 84322, USA ERIC M. GESE, United States Department of Agriculture/Animal and Plant Health Inspection Service/Wildlife Services/National Wildlife Research Center and Department of Wildland Resources, Utah State University, Logan, UT 84322, USA KYRAN E. KUNKEL, Department of Wildland Resources, Utah State University, Logan, UT 84322, USA ABSTRACT Minimizing risk of predation from multiple predators can be difficult, particularly when the risk effects of one predator species may influence vulnerability to a second predator species. -

Copyright by An-Binh Thi Phung 2020
Copyright by An-Binh Thi Phung 2020 The Thesis Committee for An-Binh Thi Phung Certifies that this is the approved version of the following Thesis: GREEN SCREEN AS AN INDEX FOR SEEING, HOW TO BE: GREEN APPROVED BY SUPERVISING COMMITTEE: Kristin Lucas, Supervisor Kathryn McCarthy Green Screen as an Index for Seeing (How to Be Green) by An-Binh Thi Phung Thesis Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Master of Fine Arts The University of Texas at Austin August 2020 Dedication For Me, Ba, Co Minh, Ba Co, and the rest of my extended family that are an infinite source of love and care. Abstract Green Screen as an Index for Seeing (How to Be Green) An-binh Thi Phung, MFA The University of Texas at Austin, 2020 Supervisor: Kristin Lucas An introduction to the history and usage of green screen in film and other forms of media culture and a descriptions of works made by An-Binh Thi Phung in conjunction with this research. The special effect is analyzed in relationship to philosophical concepts such as the gaze and a the supermodern “non-place” to formulate a system of representing identity. v Table of Contents List of Figures ................................................................................................................... vii Chapter 1: Introduction .......................................................................................................1 Chapter 2: Predator .............................................................................................................2 -

Dynamics and Responses to Mortality Rates of Competing Predators Undergoing Predator–Prey Cycles
ARTICLE IN PRESS Theoretical Population Biology 64 (2003) 163–176 http://www.elsevier.com/locate/ytpbi Dynamics and responses to mortality rates ofcompeting predators undergoing predator–prey cycles Peter A. Abrams,a,Ã Chad E. Brassil,a and Robert D. Holtb a Department of Zoology, The University of Toronto, 25 Harbord Street, Toronto, Ont., Canada M5S 3G5 b Department of Zoology, University of Florida, P.O. Box 118525, Gainesville, FL 32611-8525, USA Received 30 April 2002 Abstract Two or more competing predators can coexist using a single homogeneous prey species ifthe system containing all three undergoes internally generated fluctuations in density. However, the dynamics ofspecies that coexist via this mechanism have not been extensively explored. Here, we examine both the nature ofthe dynamics and the responses ofthe mean densities ofeach predator to mortality imposed upon it or its competitor. The analysis ofdynamics uncovers several previously undescribed behaviors for this model, including chaotic fluctuations, and long-term transients that differ significantly from the ultimate patterns offluctuations. The limiting dynamics ofthe system can be loosely classified as synchronous cycles, asynchronous cycles, and chaotic dynamics. Synchronous cycles are simple limit cycles with highly positively correlated densities ofthe two predator species. Asynchronous cycles are limit cycles, frequently of complex form, including a significant period during which prey density is nearly constant while one predator gradually, monotonically replaces the other. Chaotic dynamics are aperiodic and generally have intermediate correlations between predator densities. Continuous changes in density-independent mortality rates often lead to abrupt transitions in mean population sizes, and increases in the mortality rate ofone predator may decrease the population size of the competing predator.