Flood Hazard Mapping of Mainit-Tubay River Basin, Mindanao, Philippines Using Lidar and Numerical Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
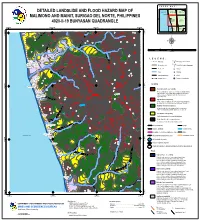
Detailed Landslide and Flood Hazard Map of Malimono And
II NN DD EE XX MM AA PP :: 125°25'0"E 125°30'0"E PLACER DETAILED LANDSLIDE AND FLOOD HAZARD MAP OF 4020-II-13 4020-II-14 4020-II-15 MALIMONO AND MAINIT, SURIGAO DEL NORTE, PHILIPPINES MAINIT 9°35'0"N 9°35'0"N MALIMONO 4020-II-19 BUNYASAN QUADRANGLE 4020-II-19 4020-II-20 125°24'0"E 125°25'0"E 125°26'0"E 125°27'0"E 4020-II-24 4020-II-25 7 6 7 0 0 4 0 0 5 125°25'0"E 9°36'0"N 9°36'0"N 0 6 7 6 0 220 5 80 62 2 0 160 00 0 0 2 2 7 1 μ 0120.5 60 Kilometers 6 0 0 5 6 0 Purok I (Hanagdong)# LL E G E N D : Purok VI POBLACION (Hanagdong)n 7 4 Barangay center location # 0 Main road Purok II P! 0 (Hanagdong) 40 52 Purok V # 0 So. Magaling (Hanagdong)# P Purok III (Poblacion) Purok/Sitio location (Barangay) Purok IV (Hanagdong)# Secondary road # (Hanagdong)# 0 34 Track; trail n School 4 0 6 70 0 River v® Hospital 0 6 7 0 0 2 4 G 7 Church 440 7 Municipal boundary Purok IV (Bunyasan) # 0 20 8 1 80 Contour (meter) Proposed relocation site Purok III 0 4 Purok II 3 6 (Bunyasan) 0 1 8 6 0 # 0 (Bunyasan)# P 0 BUNYASAN 0 6 660 Purok I Landslide (Bunyasan)# n Bunyasan Elem School ( ) 9°35'0"N 780 9°35'0"N Very high landslide susceptibility 40 0 Purok III 4 n 8 (Cansayong)# Areas usually with steep to very steep slopes and underlain by CANSAYONG 8 8 2 weak materials. -

Socio-Economics, Institutional Support, and Intervention Programs Toward Sustainable Fisheries Management in Lake Mainit, Philippines
Socio-Economics, Institutional Support, and Intervention Programs Toward Sustainable Fisheries Management in Lake Mainit, Philippines Asuncion B. De Guzman, Alita E. Openiano, Marilou M. Ologuin and Jeanette J. Samson Mindanao State University at Naawan, 9023 Naawan, Misamis Oriental E-mail: [email protected] ABSTRACT Lake Mainit is an important natural resource shared by two provinces in northern Mindanao, Surigao del Norte and Agusan del Norte, notable for being the deepest and the fourth largest lake in the Philippines. This wetland ecosystem supports a thriving freshwater fishery and the livelihood of more than 4,000 fishers. At least 19 types of traditional and ingenious modifications of fishing gears are used. On the average Lake Mainit fishers earn an estimated monthly income of Php4,340 which falls below the poverty threshold for an average family in rural Philippines. Part of a comprehensive resource assessment project in Lake Mainit is a socio- economic profiling and appraisal of the numerous intervention programs in fisheries management and livelihood development introduced into the lakeshore communities in an attempt to improve the ecological and socio-economic situation around the lake. The results of this assessment will provide the scientific basis for formulating a comprehensive fisheries management plan for Lake Mainit that shall, in turn, be integrated into the Lake Mainit Development Alliance (LMDA) development agenda to help restore Lake Mainit fisheries to sustainable levels by addressing issues on declining water quality, regulation of fishing effort, and decreasing fisher income. Keywords: Lake Mainit, socio-economics, management issues, intervention programs, LMDA. INTRODUCTION Lake Mainit is an ecologically important resource within two provincial jurisdictions in the Caraga Region, namely, Agusan del Norte and Surigao del Norte, bordered by eight municipalities that comprise the Lake Mainit Watershed (Fig. -

Typhoon Bopha (Pablo)
N MA019v2 ' N 0 ' Silago 3 0 ° 3 0 ° 1 0 Philippines 1 Totally Damaged Houses Partially Damaged Houses Number of houses Number of houses Sogod Loreto Loreto 1-25 2-100 717 376 Loreto Loreto 26-250 101-500 San Juan San Juan 251-1000 501-1000 1001-2000 1001-2000 2001-4000 2001-4000 Cagdianao Cagdianao 1 N ° N San Isidro 0 ° Dinagat 1 0 Dinagat San Isidro Philippines: 1 5 Dinagat (Surigao del Norte) Dinagat (Surigao 5 del Norte) Numancia 280 Typhoon Bopha Numancia Pilar Pilar Pilar Pilar (Pablo) - General 547 Surigao Dapa Surigao Dapa Luna General Totally and Partially Surigao Surigao Luna San San City Francisco City Francisco Dapa Dapa Damaged Housing in 1 208 3 4 6 6 Placer Placer Caraga Placer Placer 10 21 Bacuag Mainit Bacuag (as at 9th Dec 5am) Mainit Mainit 2 N 1 Mainit ' N 0 ' 3 0 ° Map shows totally and partially damaged 3 9 Claver ° 9 Claver housing in Davao region as of 9th Dec. 33 Bohol Sea Kitcharao Source is "NDRRMC sitrep, Effects of Bohol Sea Kitcharao 10 Typhoon "Pablo" (Bopha) 9th Dec 5am". 3 Province Madrid Storm track Madrid Region Lanuza Tubay Cortes ! Tubay Carmen Major settlements Carmen Cortes 513 2 127 21 Lanuza 10 Remedios T. Tandag Tandag City Tandag Remedios T. Tandag City Romualdez 3 Romualdez 15 N ° N 13 9 ° Bayabas 9 Buenavista Sibagat Buenavista Sibagat Bayabas Carmen Carmen Butuan 53 200 Butuan 127 Butuan 21 Butuan 3 City City Cagwait Cagwait 254 Prosperidad 12 17 Gingoog Buenavista 631 Gingoog Buenavista Marihatag Marihatag 43 1 38 19 San Las Nieves San Agustin Las Nieves Agustin 57 Prosperidad 56 2 4 0 10 -

Indigenous Religion, Institutions and Rituals of the Mamanwas of Caraga Region, Philippines
Asian Journal of Social Sciences, Arts and Humanities Vol. 1, No.1, 2013 INDIGENOUS RELIGION, INSTITUTIONS AND RITUALS OF THE MAMANWAS OF CARAGA REGION, PHILIPPINES Ramel D. Tomaquin College of Arts and Sciences Surigao del Sur State University Tandag City, Philippines Email: [email protected] ABSTRACT The Mamanwas, one of the IP communities of Caraga region. Said to be one of the original settlers of Caraga and considered the Negrito group of Mindanao. Only very few literatures and studies written about them. Despite of massive acculturation of other IP groups of the region such the Agusan-Surigao Manobos, the Mansaka/Mandaya, Banwaon, Higaanon and Talaandig. The Mamanwas still on the process of integration to Philippine body-politic. It is in this scenario they were able to retain indigenous religion, institutions and rituals. Thus the study was conducted. It covers on the following sites: Mt. Manganlo in Claver, Lake Mainit in Alegria both Surigao Del Norte, Hitaob in Tandag City, Lubcon and Burgus in Cortes and Sibahay in Lanuza of Surigao Del Sur respectively. The study used ethnographic method with strict adherence of the right of pre- informed consent in accordance with RA 8371 or Indigenous Peoples Right Act of 1997. It can be deduced from the paper that despite of socio- cultural changes of the IP’s of Caraga the Mamanwas were able to retain these practices but for how long? Moreover, socio-cultural change is slowly taking place in the Mamanwa social milieu. Preservation of these worldviews is wanting as a part of national heritage and for posterity. -
NDRRMC Update Progressl Report on the Effects of SLPA in CARAGA
REPUBLIC OF THE PHILIPPINES National Disaster Risk Reduction and Management Center, Camp Gen. Emilio Aguinaldo, Quezon City, Philippines NDRRMC UPDATE Progress Report on the Effects of Shallow Low Pressure Area (SLPA) in CARAGA Region Releasing Officer USEC BENITO T. RAMOS Executive Director, NDRRMC and Administrator, OCD DATE: 19 February 2011, 2:00 PM Sources: OCD – CARAGA, Agusan del Sur PIA, PNP and LGU I. SITUATION OVERVIEW Profile of the Incident • Due to Shallow Low Pressure Area (SLPA), CARAGA Region is experiencing cloudy skies but no rain since last night 18 February 2011. The following incidents were observed and monitored: AGUSAN DEL SUR • River systems in the Province of Agusan del Sur are now increasing in water level particularly in Gibong River in Prosperidad and Wawa River in Sibagat • Portion of National Highway in Bunawan, Agusan del Sur is flooded but still passable to heavy vehicles • Few houses in Los Arcos, Prosperidad, Agusan del Sur are still underwater. Road section in the same area is submerged with water but passable. • Pre-emptive evacuations were conducted in the municipalities of San Francisco (Brgys. 1 and 2) and Rosario (Brgys. Poblacion, Libuac and Cabanto). Evacuees are now housed at the Municipal Gym, Agusan del Sur National High School (San Francisco) and Municipal Training Center (Rosario) AGUSAN DEL NORTE • Flights of Cebu Pacific and Philippine Airlines in Butuan City resumed this morning. SURIGAO DEL SUR • Road section from San Vicente to Poblacion, Barobo, Surigao del Sur is now passable to all types of vehicles • Awa-Azpetia-lianga road incurred slip at the side portion with 26 meters length, 5 meters wide and average depth of 3 meters. -

Download 723.44 KB
Indigenous Peoples Plan Project number: 41220-013 April 2020 PHI: Integrated Natural Resources and Environmental Management Project Subproject: Improvement of Mainit Communal Irrigation System, Bontoc, Mt. Province Prepared by the Municipality of Bontoc, Province of Mountain Province for the Department of Environment and Natural Resources and the Asian Development Bank. i CURRENCY EQUIVALENTS (as of 16 March 2020) Currency unit – peso (PhP) PhP1.00 = $0.01941 $1.00 = PhP 51.5175 ABBREVIATIONS ADB Asian Development Bank ADSDPP Ancestral Domain Sustainable Development and Protection Plan BLGU Barangay Local Government Unit BPMET Barangay Participatory Monitoring and Evaluation Team CADT certificate of ancestral domain titles CIS communal irrigation system COE council of elders DA Department of Agriculture DENR Department of Environment and Natural Resources FPIC free and prior informed consent ICC indigenous cultural communities INREMP Integrated Natural Resources and Environment Management Project IP indigenous people IPDF indigenous people’s development framework IPP indigenous peoples plan IPRA indigenous peoples rights act LGU Local Government Unit MLGU Municipal Local Government Unit MOA memorandum of agreement MPDO Municipal Planning and Development Office NCIP National Commission on Indigenous Peoples NPCO national project coordinating office O and M operation and maintenance PPIPs participatory project investment plans PMIC project management implementation consultants PMU project management unit POs peoples’ organizations PPCO Provincial Planning and Coordinating Officer RI rural infrastructure SB sangguniang bayan SPMU Sub-Project Management Unit ii This Indigenous Peoples Plan is a document of the borrower. The views expressed herein do not necessarily represent those of ADB's Board of Directors, Management, or staff, and may be preliminary in nature. -

Gastropod Fauna in Key Habitats Surrounding Lake Mainit, Philippines with Notes on Snail-Associated Diseases 1Joycelyn C
Gastropod fauna in key habitats surrounding Lake Mainit, Philippines with notes on snail-associated diseases 1Joycelyn C. Jumawan, 1Leonardo A. Estaño, 1Gemma H. Siega, 1Kariza A. Maghinay, 2Meriam M. Santillan, 1Jess H. Jumawan 1 Biology Department College of Arts and Sciences, Caraga State University; 2 College of Engineering and Information Technology, Caraga State University, Ampayon, Butuan City, Philippines. Corresponding author: J. C. Jumawan, [email protected] Abstract. Lake Mainit is the deepest lake in the Philippines. Nonetheless, cases of schistosomiasis were also reported in several communities surrounding the lake adding to concern to the tourism in the area. This gastropod survey was conducted in ten barangays surrounding Lake Mainit to provide an inventory of gastropods and their possible preference to habitats surrounding the lake. Collection of samples was done monthly from February to November 2014. A total of fifteen gastropod species from nine families were identified, with four species endemic to the country. Of these species, only one, Vivipara angularis, was utilized for food, and is collected abundantly in the lake. Other species were either considered agricultural pests (Ampullaria luzonica, Pomacea luzonica) while others were known vectors of zoonotic diseases such as Oncomelania hupensis quadrasi, Melanoides tuberculata, and Radix rubiginosa. Notably, known vectors of schistosomiasis were found in rice fields and creeks but not in the lakeshore study stations. This study is the first documentation of gastropods in five habitats surrounding Lake Mainit and will be helpful as baseline data for researches on snail-associated zoonotic diseases in this area. Key Words: schistosomiasis, zoonosis, diversity, Caraga region. Introduction. Lake Mainit is the fourth largest lake in the Philippines, and the deepest in the country (LMDA 2005). -
VULNERABILITY and ADAPTATION ASSESSMENT REPORT Municipality of Jabonga, Province of Agusan Del Norte
(MDG-F 1656 Outcome 3.4) Climate Resilient Farming Communities in Agusan del Norte through Innovative Risk Transfer Mechanism VULNERABILITY AND ADAPTATION ASSESSMENT REPORT Municipality of Jabonga, Province of Agusan del Norte A Climate Change Adaptation Project of the INTERNATIONAL LABOUR ORGANIZATION (ILO), a specialized agency of the United Nations with GOP Partners: DEPARTMENT OF LABOR AND EMPLOYMENT (DOLE) DEPARTMENT OF TRADE AND INDUSTRY (DTI), and THE PROVINCE OF AGUSAN DEL NORTE VULNERABILITY AND ADAPTATION ASSESSMENT REPORT Municipality of Jabonga, Province of Agusan del Norte (MDG-F 1656 Outcome 3.4) Climate Resilient Farming Communities in Agusan del Norte through Innovative Risk Transfer Mechanism International Labour Organization Table of Content Table of Contents 4 Acronyms 6 List of Figures 7 List of tables 8 Message 9 Acknowledgments 11 The Project Brief 14 Foreword 16 Executive Summary 14 Introduction 22 1 AREA CHARACTERIZATION 23 1.1. BIOPHYSICAL CHARACTERIZATION 24 1.1.1. Location and Topography 24 1.1.2. Geology Land Area and Land Use Patterns 25 1.1.3. Climate and Rainfall Pattern 26 1.2. SOCIO-ECONOMIC PROFILE 28 1.2.1 Demographics: Population Size, Density, Urban-Rural 28 Distribution 1.2.2. Income and Poverty Incidence 29 1.2.3. Agricultural Production System 30 1.2.4. Commerce and Trade 32 1.2.5. Livelihood 32 1.3. INSTITUTIONAL PROFILE 33 1.3.1. Infrastructure 33 1.3.2. Support Services 33 2 CURRENT HAZARDS AND OBSERVED CLIMATE CHANGE IMPACT 35 2.1. SOURCES AND TYPES 36 2.1.1. Floods 36 2.1.2. Drought 36 2.1.3. -

Guidelines for Authors
FLOOD HAZARD MAPPING OF RIVER BASINS IN CARAGA REGION, MINDANAO, PHILIPPINES THROUGH THE CSU PHIL-LIDAR 1 PROJECT Meriam Makinano-Santillan and Jojene R. Santillan CSU Phil-LiDAR 1, Caraga Center for Geoinformatics, Caraga State University Ampayon, Butuan City 8600 Philippines Email: Email: [email protected] KEY WORDS: LiDAR, flood hazard mapping, Caraga Region, Mindanao, Philippines ABSTRACT: In this paper, we share our activities and recent accomplishments in utilizing high spatial resolution Light Detection and Ranging (LiDAR) datasets and other geospatial datasets and techniques for flood hazard mapping of river basins in Caraga Region, Mindanao, Philippines through the CSU Phil-LiDAR 1 project. CSU Phil-LiDAR 1 is one of several projects under the “Phil-LiDAR1: Hazard Mapping of the Philippines using LiDAR” program initiated and supported by the Department of Science and Technology (DOST). Projects under this program are being implemented nationwide by fifteen (15) higher education institutions (HEIs) for 3 years starting 2014. An extension of the University of the Philippines’ Disaster Risk Exposure Assessment for Mitigation (DREAM) program, Phil-LIDAR 1′s purpose is for HEIs to utilize LiDAR datasets to generate flood hazard maps of their assigned project areas which are distributed throughout the Philippines. CSU Phil-LiDAR 1 in particular aims to derive Digital Surface Models (DSMs) and Digital Terrain Models (DTMs) from preprocessed LiDAR data, and to utilize these elevation datasets, together with data gathered from field surveys (cross-sections, bathymetry and hydrology) as inputs in the development of flood models. The flood models are then used to generate flood hazard maps of the river basins and watersheds of Caraga Region. -
Inception Report
INCEPTION REPORT Sustainable Fisheries Management Program for Lake Mainit: Phase I. Rapid Resource Assessment Prepared by Mindanao State University at Naawan 9023 Naawan, Misamis Oriental February 2008 i Implementing Agency: Mindanao State University at Naawan (MSUN) 9023 Naawan, Misamis Oriental, Philippines email: [email protected] Funding Agency: Philippine Council for Aquatic and Marine Research and Development (PCAMRD-DOST) Collaborators: PCAMRD Zonal Center IV, Lake Mainit Development Alliance (LMDA) & BFAR-13 Project Team Composition Dr. Asuncion B. de Guzman - Project Coordinator Dr. Wilfredo H. Uy - Study Leader, Aquatic Ecology and Fisheries Assessment Dr. Jessie G. Gorospe - Study Leader, Fish Biology & Stock Dynamics Alita E. Openiano - Study Leader, Socio-Economics & Institutional Arrangements Rodrigo E. Acuña - Member Rey L. Roa - Member Rustan C. Eballe - Member Jerry P. Garcia - Member Ruth D. Gaid - Member Jeannette J. Samson - Member Jayrald R. Santamina - Science Research Assistant Citation: This report should be cited as follows: De Guzman, A.B., W.H. Uy, J.G. Gorospe, A.E. Openiano, R.E. Acuña, R.L. Roa, R.C.Eballe, J.P.Garcia, R.D.Gaid, J.J.Samson and J.R. Santamina. 2008. Sustainable Fisheries Management Program for Lake Mainit: Phase I: Rapid Resource Assessment. Inception Report. Prepared by MSU at Naawan for the PCAMRD-DOST. 75p. ii Executive Summary Lake Mainit is an important shared resource of Agusan Norte and Surigao del Norte, distinguished as the deepest (219.35 meters) and fourth largest (17,060 ha) lake in the Philippines, with a shoreline of 62.1 km long and a watershed area of 87,072 ha. Twenty- eight river tributaries contribute to the water volume of Lake Mainit, which is drained by a single outlet – the 29 km Kalinawan River that flows into Butuan Bay. -

Aquatic Biodiversity of Lake Mainit, Southern Philippines
Aquatic Biodiversity of Lake Mainit, Southern Philippines Wilfredo H. Uy1, Asuncion B. De Guzman1, 2 2 Rodrigo E. Acuña and Rey L. Roa 1College of Science and Environment 2School of Marine Fisheries and technology Mindanao State University at Naawan, 9023 Naawan, Misamis Oriental, Philippines Email: [email protected] ABSTRACT Lake Mainit is the deepest and fourth largest lake in the Philippines. The productivity and biodiversity of this oligotrophic lake have become vulnerable to various environmental and human pressures resulting from rapid economic development in the region. An inventory of fish, invertebrates and aquatic vegetation occurring within Lake Mainit and its single outlet Kalinawan river was conducted to generate a comprehensive profile and status of the lake’s biodiversity that will be useful in updating the Lake Mainit Development Plan towards the sustainable use of the lake resources. A total of 41 species of fish, 5 crustaceans, 8 mollusks and 14 species of aquatic plants were identified in the lake. The most popular fish resources are the gobies pijanga (Glossogobius giuris) and bugwan (Hypseleotris agilis) although their populations have declined through the years. Several exotic species of fish have been introduced in the lake, such as tilapia, carp and catfish. The most abundant crustaceans are two species of freshwater shrimp: the tiny shrimp Caridina mindanao locally known as isik and the freshwater prawn Macrobrachium lanceifrons locally known as ulang. The most abundant freshwater mollusks found in Lake Mainit are the bivalve Corbicula sp. locally known as bibe, and the snails Viviparia angularis (ige) and the golden apple snail Pomacea canaliculata (kuhol). -

1D Inversion of Magnetotelluric Data from Mainit Geothermal Area, Philippines
Orkustofnun, Grensasvegur 9, Reports 2018 IS-108 Reykjavik, Iceland Number 25 1D INVERSION OF MAGNETOTELLURIC DATA FROM MAINIT GEOTHERMAL AREA, PHILIPPINES Jeffrey G. Sayco Department of Energy, Energy Center Rizal Drive Cor. 34th Street Bonifacio Global City Taguig City PHILIPPINES [email protected] ABSTRACT Mainit geothermal project is one of the geothermal prospects located in Surigao del Norte, Philippines. Aside from hosting several warm springs, the province is also rich in minerals with abundant deposits of silver, copper, gold and nickel. Several studies have been conducted in the area to confirm the viability and feasibility of a geothermal system, the most recent one was undertaken in 2012 by Energy Development Corporation (EDC). Magnetotelluric (MT) survey was conducted in 2012 to determine the subsurface resistivity structure of the area. Based on the result of the 1D inversion, three significant findings were observed: 1) A shallow, high-resistivity layer of the Paco- Maniayao Volcanic Complex (PMVC) is associated with the Young Paco-Maniayao volcanics; 2) A low-resistivity layer outcropping in the west and northwest of the PMVC is generally characterized by Tugunan sedimentary formations; and 3) A high-resistivity layer at depth, northeast of the area is believed to be an intrusive body which could be a heat source which is also responsible for the mineralization processes as manifested by mineral deposits. However, since the MT data were obtained close to the coast, the surrounding conductive sea makes interpretation difficult, especially the deep part of the subsurface which might give a different response in the inversion due to the effect of the sea.