Control and Implementation of an Autonomous Sailboat
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mainsail Trim Pointers, Reefing and Sail Care for the Beneteau Oceanis Series
Neil Pryde Sails International 1681 Barnum Avenue Stratford, CT 06614 203-375-2626 [email protected] INTERNATIONAL DESIGN AND TECHNICAL OFFICE Mainsail Trim Pointers, Reefing and Sail Care for the Beneteau Oceanis Series The following points on mainsail trim apply both to the Furling and Classic mainsails we produce for Beneteau USA and the Oceanis Line of boats. In sailing the boats we can offer these general ideas and observations that will apply to the 311’s through to the newest B49. Mainsail trim falls into two categories, upwind and downwind. MAINSAIL TRIM: The following points on mainsail trim apply both to the Furling and Classic mainsail, as the concepts are the same. Mainsail trim falls into two categories, upwind and downwind. Upwind 1. Upwind in up to about 8 knots true wind the traveler can be brought to weather of centerline. This ensures that the boom will be close centerline and the leech of the sail in a powerful upwind mode. 2. The outhaul should be eased 2” / 50mm at the stopper, easing the foot of the mainsail away from the boom about 8”/200mm 3. Mainsheet tension should be tight enough to have the uppermost tell tail on the leech streaming aft about 50% of the time in the 7- 12 true wind range. For those with furling mainsails the action of furling and unfurling the sail can play havoc with keeping the telltales on the sail and you may need to replace them from time to time. Mainsail outhaul eased for light air upwind trim You will find that the upper tell tail will stall and fold over to the weather side of the sail about 50% of the time in 7-12 knots. -

The Weather Helm Issue (Rev 20 02 2020)
Corbin 39 – the weather helm issue (rev 20 02 2020) Synopsis The subject of weather helm comes up repeatedly when discussing the Corbin 39 and not all of the folklore is justified. This note attempts to summarise the issue and to relate it to sufficient evidence, and to qualitative theory, that we can be reasonably certain of the situation. Remember - It is possible to overpower a yacht and induce weather helm, what we are trying to do is identify excessive weather helm. The key take-away is that the excessive weather helm was a genuine issue, which affected all the mk1 cutters irrespective of whether they were equipped with the taller double-spreader mast or the shorter single-spreader mast, provided that the mast was set in the intended aft mast position. Perhaps this was worse in the mk1 tallmast vs the mk1 shortmast, but we are not at all certain of that. All the mk1’s that had the forestay relocated onto a 3-foot long bowsprit were later able to alleviate this to an extent. The mk 1’s that have reduced the area of their main by shortening the mainsail boom & foot (or used in-mast furling) have reportedly completely eliminated this weather helm. All other versions including the mk1 ketches and all the mk2 cutters & ketches appear to be completely unaffected. This is the first openly published version of this analysis. Previous drafts were incomplete and drew erroneous conclusions in some areas due to an absence of reliable data. That has now been overcome as further evidence has come forwards, and so there are material differences between this version and previous drafts. -
SLG 2018-03.Xlsx
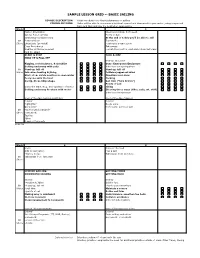
SAMPLE LESSON GRID -- BASIC SAILING COURSE DESCRIPTION A fun introduction to the fundamentals of sailing COURSE OUTCOME Sailor will be able to maneuver a keelboat upwind and downwind in open water ,using proper sail trim, and tack and jibe the boat when appropriate Week 1 2 Harbor Orientation Emergency Equip. & Proceed. Safety, Fun, Learning Points of Sail Emergency Contact Forms At the end of today you'll be able to sail On Personal Gear Teamwork: Shore Lifejackets (provided) --sailing is a team sport Class Procedures Takeaways: Weather & Marine Forecast --what stood out for each sailor from last class Find the Wind START & STOP TACK & JIBE HEAD UP & FALL OFF Review: Checklist Rigging, nomenclature, & checklist ! ! ! ! Demo Emergency Equipment ! ! ! ! Getting underway with sails ! ! ! ! Intro to mooring departure On Head up, fall off ! ! ! ! Head up, fall off ! ! ! ! Water Introduce tacking & jibing ! ! ! ! Telltales/apparent wind ! ! ! ! Start, stop, safety position in open water ! ! ! ! Directing your crew ! ! ! ! Everyone sails the boat ! ! ! ! Tacking ! ! ! ! De-rig, Stow, Ship-shape ! ! ! ! Sail trim ("turn & trim") ! ! ! ! Points of sail ! ! ! ! Demo the start, stop, and operation of motor ! ! ! ! Jibing ! ! ! ! Getting underway & return with motor ! ! ! ! Steering three ways (tiller, sails, wt. shift) ! ! ! ! Intro to mooring return Knot of the day--locking cleat hitch Knot of the day--figure 8 Debrief Debrief Highlights? No-go Zone Questions? Homework: points of sail On Has the wind changed? Shore Homework: Tacking Jibing 5 days -
J/22 Sailing MANUAL
J/22 Sailing MANUAL UCI SAILING PROGRAM Written by: Joyce Ibbetson Robert Koll Mary Thornton David Camerini Illustrations by: Sally Valarine and Knowlton Shore Copyright 2013 All Rights Reserved UCI J/22 Sailing Manual 2 Table of Contents 1. Introduction to the J/22 ......................................................... 3 How to use this manual ..................................................................... Background Information .................................................................... Getting to Know Your Boat ................................................................ Preparation and Rigging ..................................................................... 2. Sailing Well .......................................................................... 17 Points of Sail ....................................................................................... Skipper Responsibility ........................................................................ Basics of Sail Trim ............................................................................... Sailing Maneuvers .............................................................................. Sail Shape ........................................................................................... Understanding the Wind.................................................................... Weather and Lee Helm ...................................................................... Heavy Weather Sailing ...................................................................... -

World War II at Sea This Page Intentionally Left Blank World War II at Sea
World War II at Sea This page intentionally left blank World War II at Sea AN ENCYCLOPEDIA Volume I: A–K Dr. Spencer C. Tucker Editor Dr. Paul G. Pierpaoli Jr. Associate Editor Dr. Eric W. Osborne Assistant Editor Vincent P. O’Hara Assistant Editor Copyright 2012 by ABC-CLIO, LLC All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, except for the inclusion of brief quotations in a review, without prior permission in writing from the publisher. Library of Congress Cataloging-in-Publication Data World War II at sea : an encyclopedia / Spencer C. Tucker. p. cm. Includes bibliographical references and index. ISBN 978-1-59884-457-3 (hardcopy : alk. paper) — ISBN 978-1-59884-458-0 (ebook) 1. World War, 1939–1945—Naval operations— Encyclopedias. I. Tucker, Spencer, 1937– II. Title: World War Two at sea. D770.W66 2011 940.54'503—dc23 2011042142 ISBN: 978-1-59884-457-3 EISBN: 978-1-59884-458-0 15 14 13 12 11 1 2 3 4 5 This book is also available on the World Wide Web as an eBook. Visit www.abc-clio.com for details. ABC-CLIO, LLC 130 Cremona Drive, P.O. Box 1911 Santa Barbara, California 93116-1911 This book is printed on acid-free paper Manufactured in the United States of America To Malcolm “Kip” Muir Jr., scholar, gifted teacher, and friend. This page intentionally left blank Contents About the Editor ix Editorial Advisory Board xi List of Entries xiii Preface xxiii Overview xxv Entries A–Z 1 Chronology of Principal Events of World War II at Sea 823 Glossary of World War II Naval Terms 831 Bibliography 839 List of Editors and Contributors 865 Categorical Index 877 Index 889 vii This page intentionally left blank About the Editor Spencer C. -

For Session B Set One of the Two Buoys to Wind- Ward to Facilitate an Easy Beat and a Broad Reach Return Between Them
For session B set one of the two buoys to wind- ward to facilitate an easy beat and a broad reach return between them. Draw the circle on the white board to demon- strate the wind direction, the no sail zone, the need to sail to windward, and the sail set to the wind, and leeway. Explain that the boat will slip sideways when sail- ing to windward resulting in the straight line beat to the buoy being some- times unattainable. If there are windshifts a tack may therefore be necessary. In session B the instruc- tor is constantly reinforc- ing the concept that to windward the sail is set, the course adjusted to suit the wind direction. 7. Beating Continued… 7. We say pushing it back on course, as the boat will always be try- ing to point up into the wind and you hold a course by pushing down- wind on the joystick. This is the correct balance for a sailing boat and called "WEATHER HELM" - the boat wants to turn up into the weather. "LEE HELM" is when it wants to turn downwind. Reefing 1. Reeng is reducing the power generated by the sail. 2. Reeng is often necessary in strong winds and on our boats it is accomplished by pulling a cord which rotates the mast, rolling up the sail like a blind. 3. To reef, the port side (left side) reeng line is pulled with the left hand and is jammed in the clamcleat positioned on the console by your left knee. 4. The rst turn of the mast attens the sail which greatly reduces its power with little reduction in area. -

For Outright Speed
TUNE YOUR SAILS FOR OUTRIGHT SPEED J/24 Tuning Guide Rev R05 Congratulations on your purchase of The other reason tuning (here we mean crews, but must stand up to near gales North J/24 sails. We have been building rig tuning) is important with the J/24 too. J/24 sails since the boat’s inception with is that we are asking a very limited sail the goal of providing our customers with inventory to perform over a very wide Picture a starting line of 50 to 80 ultra- fast, easy to use, and durable sails. You range of conditions. J/24’s are commonly aggressive racing fanatics and you can can follow this guide with confidence, raced from 0-30 knots of wind and to see how Darwin’s theory of evolution knowing that North Sails’ clients have ask four sails to cover that entire range applies to sailboat racing. Very often won more World, Continental and is really asking a lot. We need the sails one boat length separates the front National Championships than all our to be board flat in heavy air yet full and row from the cheap seats at the start, competition combined. powerful in the light stuff. so attention to boat preparation has become imperative to survival in the This guide is the result of years of testing, The best way to accomplish this is class. Following is our list of preparation tuning and practical racing experience. through aggressive adjustment of the ideas that will allow your team to stay While we can’t guarantee that you will shroud tensions (which directly affects competitive. -

Iiimini Iiiii
m im m Contents 1 Foreword 2 Introduction to Sailing 3 Setting and Stowing the Sails 5 Courses and Directions 7 Casting Off 9 Casting Off Broadside 11 Tacking 13 Jibing 15 Shooting Head To Wind 17 Near Head To Wind 19 Man Over Board Maneuver 21 Reefing 23 Mooring 25 Mooring Alongside 27 Introduction to the Motor Component 29 Casting Off Alongside 31 Turning In a Tight Space 33 Stopping and Starting On Course 35 Man Overboard Maneuver 37 Mooring Alongside 39 Navigating According To Navigational Mark or By Compass 41 Knots 9780870336324 US $19.99 Mi iii mini iiiii 780870 336324 5 19 9 9 978 - 0 - 87033 - 632-4 Sailing describes two very different ways of moving forward. Heaving To The first kind of locomotion, which even a child understands, This maneuver is an art form which threatens to be forgotten. It is that of an object being thrust leeward by the wind - just as is best for bringing calm to the boat and for possibly being able every beer can dropped in the trade winds south of the Canary to take care of someone in need. If the jib sheet isn't released Islands ends up in the Caribbean.The second kind is created by in the tack, then a back-winded jib results.The mainsail is now sailing into the wind. When positiveand negative pressures exist eased until both sails balance each other out.This way, both sails on a sail and the centerboard or keel resist lateral drift, then a receive wind pressure and the boat will roll less than without sailboat, amazingly, travels forward despite the wind. -

United States Patent (113,597,856 72) Inventors Rogor Strange Waddington, Deceased (50 Field of Search
United States Patent (113,597,856 72) inventors Rogor Strange Waddington, deceased (50 Field of Search............................................ 35111; late of Lausanne, Switzerland; 272/17, 44, 45 Bruce Duval, Lausanne, Switzerland; David Buckley Sharp and Joan Stanley 56) References Cited Rubinstein, executors, London, England UNITED STATES PATENTS 21 Appl. No. 840,611 2,208,083 7/1940 Rousseau ..................... 3511 22) Fied July 8, 1969 2,855,702 10/1958 Taylor.......................... 35/1 45) Patented Aug. 10, 1971 73 Assignee T.P.. Limited Primary Examiner-Wm. H. Grieb Nassau, Bahamas Attorney-Jacobs & Jacobs (32) Priority Jan. 7, 1965 (33) Great Britain ABSTRACT: The invention provides a simulator for teaching 31 825165 the art of sailing on dry land. A hull mounted for change of Continuation-in-part of application Ser. No. heading upon mechanical bearings or upon a tank of water has 775,559, Nov. 13, 1968, now Patent No. a helm, a boom and a mainsheet. Operation of the boom and 3,471,943. mainsheet causes the hull to change its heading as in actual sailing upon water. The hull is preferably mounted to permit heeling. Heeling motion may be produced mechanically or by 54 SMULATINGAPPARATUSFOR TEACHING THE the action of an airstream upon a sail. Automatic devices may ART OFSALNG be provided for giving the hull heeling movements and/or for 6 Claims, 9 Drawing Figs. changing the sensitivity of the helm in a realistic manner mak (52) U.S. Cl........................................................ 35/11 ing allowance for the strength and direction of the supposed 51 int. Cl....... so a a a e g w8 g we w w w a as 8 a a so s a w8 a 8 G09b.9/06 wind, the position of the boom, etc. -

Mast Tuning a Catalina 25 by Bill Holcomb
The Technical Manuals were produced over a period encompassing the 1970s, 1980s and 1990s. As such, solicitations for updates are no longer being accepted, and the manuals are offered to Association Members as a courtesy by the Catalina 25/250 National Association. Special thanks go to Bill Holcomb for making these copies available for our use. The 2004 – 2005 Officers Catalina 25/250 National Association 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 6 17 18 19 20 21 22 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - Mast Base Organizer Skippers who want to modify their halyards and other lines so that all (or some) are lead from the mast base back on the cabin top for single handed sailing and for ease of handling often use stainless steel plates with attachment holes for shackling blocks. Two sources of these plates are: M&E Supply Company 1-800-541-6501 And Bill Henshaw 111-SW 16 St, Southport, NC 28465-7308 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - Bill Holcomb wrote the following article on behalf of Mike Leyden and other skippers thinking about changing their swing keel to the new wing keel. Mike Leyden's Wing Keel Installation by Bill Holcomb During his fall haul-out, Mike Leyden didn't get his Catalina 25s keel fully retracted before the boat settled onto the trailer. The crunching sound that came from the keel trunk as the boat settled was alarming to say the least. Mike assessed the damage and found that the cable attachment fitting on the keel end of the cable had "flopped over" rather than finding its way into the cable hole. -

CSC DINGHY SAILING MANUAL February 2021 Introduction
CSC DINGHY SAILING MANUAL February 2021 Introduction There's no substitute for actual sailing if you want to learn to sail. This booklet is only intended as a technical reference, to reinforce sailing lessons. If you're new to sailing, relax—you're in good company. Most new members of the Cal Sailing Club do not know how to sail when they join. Put this book down until later, and go sailing. Credits Editor: John Bongiovani Author: John Bergmann Change History Anonymous. First published Edition. The club began about a century ago as an offshoot of a loose association of UC students and professors who were interested in sailing. Perhaps there was a manual—who knows? A manual for sailing was put together using a typewriter and hand drawn pictures, distributed in booklet format. The most memorable part was a cartoon telling how to get onto a Lido from the water, showing a shark. Fitting conveniently in a pocket, most copies were turned into pulp during the new owner's first lesson. Sometime in the 1970s. Various minor changes stemming from disputes over gybing and other pettifoggery. Sometime during the disco era. The advent of the computer in revising the manual, but keeping the same organization. Major discovery: pdf's don't fit in pockets. Sometime in the Clinton era. Major revisions to reflect the end of the Lido, which had served the club (poorly) since 1959. Sometime in the Bush II years V11. Joel Brandt June, 2011 Dinghy Manual. Cal Sailing Club February 2021 Page 2 V12 John Bergmann, updated content and format, added detail on the RS Ventures, March, 2016 V13 Made corrections, added content on Quests, added more figures, and added a table of figures. -

MITNA Learn to Sail.Pdf
Learn to Sail at MIT Please read this before the next class and practice your knots: the bowline and the stunsail tack bend. Rigging Check with the dock staff to see if there are any restrictions. Grab the appropriate sail, check the number and put your sailing card up on the board. Find a lifejacket and get a rudder – now you are ready to rig your boat. • Place the rudder in the bottom of the boat • Find a life jacket your size, don it and zip it up • Attach the sail to the mast: o Head of sail in the mast slot, tie on the halyard (stunsail tack bend) o Foot of sail in boom slot, slug in track and attach the outhaul S-hook • Check that all three plugs are in • Wet the dock before sliding the boat • Hold onto the bow line (painter) • Lift the bow and push – slide the boat into the water • Tie the boat to the dock (bowline knot) • Get into the boat • Take the bungee cord off and put the centerboard down • Attach the rudder, with the tiller under the traveler line; tighten the traveler line • Raise the sail up to proper height (all the way for large sails) • Tighten the downhaul and adjust the outhaul, & boom vang Unrigging • Untie downhaul • Drop the sail in the boat (leave the head and foot attached) • Remove Rudder (pop cam cleat and loosen traveler) • Raise centerboard, put bungee cord on handle • Bailout the boat if it has taken on water • Pull the boat out of the water • Roll up sail • Coil the mainsheet • Put rudder & lifejacket away • Remove sailing card from board Getting Into and Out of the Boat • Grab on to the shroud (the side steel wire) and pull the boat up against the dock.