Convergence of Real-Time Audio and Video Streaming Technologies
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Proceedings 2005
LAC2005 Proceedings 3rd International Linux Audio Conference April 21 – 24, 2005 ZKM | Zentrum fur¨ Kunst und Medientechnologie Karlsruhe, Germany Published by ZKM | Zentrum fur¨ Kunst und Medientechnologie Karlsruhe, Germany April, 2005 All copyright remains with the authors www.zkm.de/lac/2005 Content Preface ............................................ ............................5 Staff ............................................... ............................6 Thursday, April 21, 2005 – Lecture Hall 11:45 AM Peter Brinkmann MidiKinesis – MIDI controllers for (almost) any purpose . ....................9 01:30 PM Victor Lazzarini Extensions to the Csound Language: from User-Defined to Plugin Opcodes and Beyond ............................. .....................13 02:15 PM Albert Gr¨af Q: A Functional Programming Language for Multimedia Applications .........21 03:00 PM St´ephane Letz, Dominique Fober and Yann Orlarey jackdmp: Jack server for multi-processor machines . ......................29 03:45 PM John ffitch On The Design of Csound5 ............................... .....................37 04:30 PM Pau Arum´ıand Xavier Amatriain CLAM, an Object Oriented Framework for Audio and Music . .............43 Friday, April 22, 2005 – Lecture Hall 11:00 AM Ivica Ico Bukvic “Made in Linux” – The Next Step .......................... ..................51 11:45 AM Christoph Eckert Linux Audio Usability Issues .......................... ........................57 01:30 PM Marije Baalman Updates of the WONDER software interface for using Wave Field Synthesis . 69 02:15 PM Georg B¨onn Development of a Composer’s Sketchbook ................. ....................73 Saturday, April 23, 2005 – Lecture Hall 11:00 AM J¨urgen Reuter SoundPaint – Painting Music ........................... ......................79 11:45 AM Michael Sch¨uepp, Rene Widtmann, Rolf “Day” Koch and Klaus Buchheim System design for audio record and playback with a computer using FireWire . 87 01:30 PM John ffitch and Tom Natt Recording all Output from a Student Radio Station . -

Standards Publications
IRISH STANDARDS PUBLISHED BASED ON CEN/CENELEC STANDARDS 1. I.S. 178:1973 Date published 28 SEPTEMBER 2005 Extruded Rigid PVC Corrugated Sheeting 2. I.S. EN 60835-1-2:1993 Date published 1 JUNE 2005 Methods of measurement for equipment used in digital microwave radio transmission systems -- Part 1: Measurements common to terrestrial radio-relay systems and satellite earth stations -- Section 2: Basic characteristics (IEC 60835-1-2:1992 (EQV)) 3. I.S. EN 160000:1993/A1:1996 Date published 1 JUNE 2005 Generic Specification: Modular electronic units 4. I.S. EN 61595-1:1999 Date published 1 JUNE 2005 Multichannel digital audio tape recorder (DATR), reel-to-reel system, for professional use -- Part 1: Format A (IEC 61595-1:1997 (EQV)) 5. I.S. EN 1990:2002+NA:2010 Date published 24 MARCH 2005 Eurocode - Basis of structural design (including Irish National Annex) 6. I.S. EN ISO 14122-4:2004 Date published 23 FEBRUARY 2005 Safety of machinery - Permanent means of access to machinery - Part 4: Fixed ladders (ISO 14122-4:2004) 7. I.S. EN 13877-1:2004 Date published 23 SEPTEMBER 2005 Concrete pavements - Part 1: Materials 8. I.S. EN 13877-2:2004 Date published 23 SEPTEMBER 2005 Concrete pavements - Part 2: Functional requirements for concrete pavements 9. I.S. EN 12843:2004 Date published 4 MARCH 2005 Precast concrete products - Masts and poles 10. I.S. EN 13225:2005 Date published 4 MARCH 2005 Precast concrete products - Linear structural elements 11. I.S. EN 13693:2004 Date published 4 MARCH 2005 Precast concrete products - Special roof elements 12. -
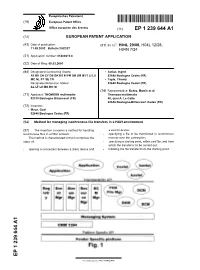
Method for Managing Isochronous File Transfers in a HAVI Environment
Europäisches Patentamt *EP001239644A1* (19) European Patent Office Office européen des brevets (11) EP 1 239 644 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.7: H04L 29/06, H04L 12/28, 11.09.2002 Bulletin 2002/37 H04N 7/24 (21) Application number: 01400612.6 (22) Date of filing: 08.03.2001 (84) Designated Contracting States: • Autier, Ingrid AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU 92648 Boulogne Cedex (FR) MC NL PT SE TR • Tapie, Thierry Designated Extension States: 92648 Boulogne Cedex (FR) AL LT LV MK RO SI (74) Representative: Kohrs, Martin et al (71) Applicant: THOMSON multimedia Thomson multimedia 92100 Boulogne Billancourt (FR) 46, quai A. Le Gallo 92648 Boulogne-Billancourt Cedex (FR) (72) Inventors: • Mace, Gael 92648 Boulogne Cedex (FR) (54) Method for managing isochronous file transfers in a HAVI environment (57) The invention concerns a method for handling a source device; isochronous files in a HAVi network. - specifying a file to be transferred in isochronous The method is characterized in that it comprises the manner over the connection; steps of: - specifying a starting point, within said file, and from which the transfer is to be carried out; - opening a connection between a client device and - initiating the file transfer from the starting point. EP 1 239 644 A1 Printed by Jouve, 75001 PARIS (FR) EP 1 239 644 A1 Description [0001] The Home Audio Video interoperability (HAVi) architecture is an attempt to accomplish high speed intercon- nectivity over an IEEE 1394 serial bus network for transacting audio/visual data. -

Tartalom Contents
TARTALOM SZABVÁNYOSÍTÁSI KÖZLEMÉNYEK Nemzeti szabványok közzététele . 1 Standards Journal Nemzeti szabvány visszavonása . 7 Nemzeti szabványok helyesbítése . 7 Hirdetmény jóváhagyó közleménnyel bevezetett szabványok magyar nyelv´´u változatának megjelenésér´´ol . 10 Egyéb szabványosítási közlemények . 12 Új európai szabványkiadványok . 13 58. évfolyam, 2. szám TANÚSÍTÁSI KÖZLEMÉNYEK 2006. február Min´´oségirányítási rendszer tanúsítása . 36 Környezetközpontú irányítási rendszer tanúsítása . 39 Tanúsítási okirat visszavonása . 39 Tanúsítási okiratok módosítása . 39 Szerkeszt´´oség: Tanúsítási okiratok érvényességi idejének lejárta . 40 Budapest IX., Üll´´oi út 25. 1091 EGYÉB KÖZLEMÉNYEK Telefon: 456-6806 Tájékoztató adatok az MSZT tevékenységér´´ol . 45 Telefax: 456-6809; 456-6823 Közlemény . 46 Szabványügyi tanácsi határozat . 46 Levélcím: Budapest 9. Pf. 24 1450 Nemzetközi környezetvédelmi gyermekrajz verseny . 47 MSZT-honlap: http://www.mszt.hu Az új megközelítés´´u irányelvekhez (direktívákhoz) harmonizált érvényes európai szabványok száma és magyar bevezetésük helyzete 2006. január 1-jéig . 48 Az új megközelítés´´u irányelvekhez (direktívákhoz) hasonló irányelvekhez A szerkeszt´´obizottság elnöke: harmonizált érvényes európai szabványok száma és magyar bevezetésük SIMON PÉTER helyzete 2006. január 1-jéig . 49 NEMZETKÖZI SZABVÁNYKIADVÁNYOK A szerkeszt´´obizottság titkára: IEC-szabványkiadványok . 50 EURÓPAI SZABVÁNYOSÍTÁSI ÉS TANÚSÍTÁSI HÍREK, PONGRÁCZ HENRIETTE INFORMÁCIÓK B´´ovült a munkavédelmi tárgyú, magyar nyelven bevezetett, -
Gaikai - Wikipedia Case 3:19-Cv-07027-WHA Document 28-2 Filed 10/14/19 Page 2 of 8 Not Logged in Talk Contributions Create Account Log In
Case 3:19-cv-07027-WHA Document 28-2 Filed 10/14/19 Page 1 of 8 EXHIBIT B Gaikai - Wikipedia Case 3:19-cv-07027-WHA Document 28-2 Filed 10/14/19 Page 2 of 8 Not logged in Talk Contributions Create account Log in Article Talk Read Edit View history Gaikai From Wikipedia, the free encyclopedia Main page Gaikai (外海, lit. "open sea", i.e. an expansive outdoor space) is an American company which provides technology for the streaming of high- Contents Gaikai Featured content end video games.[1] Founded in 2008, it was acquired by Sony Interactive Entertainment in 2012. Its technology has multiple applications, Current events including in-home streaming over a local wired or wireless network (as in Remote Play between the PlayStation 4 and PlayStation Vita), as Random article well as cloud-based gaming where video games are rendered on remote servers and delivered to end users via internet streaming (such as Donate to Wikipedia the PlayStation Now game streaming service.[2]) As a startup, before its acquisition by Sony, the company announced many partners using Wikipedia store [3] the technology from 2010 through 2012 including game publishers, web portals, retailers and consumer electronics manufacturers. On July Founded November 2008 Interaction 2, 2012, Sony announced that a formal agreement had been reached to acquire the company for $380 million USD with plans of establishing Headquarters Aliso Viejo, California, U.S. [4] Help their own new cloud-based gaming service, as well as integrating streaming technology built by Gaikai into PlayStation products, resulting Owner Sony [5] [6] About Wikipedia in PlayStation Now and Remote Play. -
DA-683 Linux User's Manual
DA-683 Linux User’s Manual First Edition, January 2011 www.moxa.com/product © 2011 Moxa Inc. All rights reserved. Reproduction without permission is prohibited. DA-683 Linux User’s Manual The software described in this manual is furnished under a license agreement and may be used only in accordance with the terms of that agreement. Copyright Notice Copyright ©2011 Moxa Inc. All rights reserved. Reproduction without permission is prohibited. Trademarks The MOXA logo is a registered trademark of Moxa Inc. All other trademarks or registered marks in this manual belong to their respective manufacturers. Disclaimer Information in this document is subject to change without notice and does not represent a commitment on the part of Moxa. Moxa provides this document as is, without warranty of any kind, either expressed or implied, including, but not limited to, its particular purpose. Moxa reserves the right to make improvements and/or changes to this manual, or to the products and/or the programs described in this manual, at any time. Information provided in this manual is intended to be accurate and reliable. However, Moxa assumes no responsibility for its use, or for any infringements on the rights of third parties that may result from its use. This product might include unintentional technical or typographical errors. Changes are periodically made to the information herein to correct such errors, and these changes are incorporated into new editions of the publication. Technical Support Contact Information www.moxa.com/support Moxa Americas Moxa China (Shanghai office) Toll-free: 1-888-669-2872 Toll-free: 800-820-5036 Tel: +1-714-528-6777 Tel: +86-21-5258-9955 Fax: +1-714-528-6778 Fax: +86-21-5258-5505 Moxa Europe Moxa Asia-Pacific Tel: +49-89-3 70 03 99-0 Tel: +886-2-8919-1230 Fax: +49-89-3 70 03 99-99 Fax: +886-2-8919-1231 Table of Contents 1. -

Cambridge University Press 978-1-107-18322-3 — Automotive Ethernet Kirsten Matheus , Thomas Königseder Index More Information
Cambridge University Press 978-1-107-18322-3 — Automotive Ethernet Kirsten Matheus , Thomas Königseder Index More Information Index 1000BASE-RH Ethernet, xxx, 89, 90, 160 AVB, Audio Video Bridging, xxviii, xxix, 4, 91, 1000BASE-T Ethernet, xxvii, 88, 121, 124, 125, 189, 197 132, 149, 180 AVBgen1. See AVB, Audio Video Bridging 1000BASE-T1 Ethernet, xxix, xxx, 17, 89, 89, 111, AVBgen2. See Time Sensitive Networking (TSN) 117, 120, 122, 149, 152, 172 Aviation Ethernet, 12 100BASE-T1 Ethernet, xxviii, xxix, xxx, 17, 79, 86, Avionics Full-Duplex Switched Ethernet (AFDX), 87, 89, 90, 91, 108, 117, 119, 124, 128, 131, xxviii, 13, 210 149, 165, 179 Avionics Systems Network (ASN), xxvii 100BASE-TX Ethernet, xxvi, xxviii, 6, 22, 72, 77, AVnu, xxviii, 91, 191, 203, 208 82, 125, 132, 148, 149, 169, 178, 180 10BASE-T Ethernet, xxvi, 180 balance. See symmetry 10BASE-T1 Ethernet, xxxi, 165 Berkeley Software Distribution (BSD), xxv, 1 10GBase-T Ethernet, xxviii Best Master Clock Algorithm (BMCA), 201 10GBASE-T Ethernet, 131, 160, 180 Bonjour, 223 150 Ohm method, 108 bridge, 230 40GBASE-T Ethernet, 180 broadcast, 215, 252, 262 Broadcom, xxviii, xxix, 79, 86, 87, 93, 124, 131, AC coupling. See DC blocking 231 access network, 14 BroadR-Reach, 78, 80, 85, 86, 93, 180, 231. See Adaptive Gain Control (AGC), 128, 145 also 100BASE-T1 Ethernet AEC-Q100, xxvi, 77, 95, 114, 177 Bulk Current Injection (BCI), 107, 108, 112 AEC-Q101, 177 bus topology, 36, 41, 44, 49, 165, 250 AEC-Q200, 177, 178 Alien FEXT (AFEXT). See crosstalk, AFEXT C2X communication, 268 Alien NEXT (ANEXT). -
Audio Mostly 2007 Conference Proceedings
Audio Mostly 2007 2nd Conference on Interaction with Sound Conference Proceedings September 27 – 28, 2007 Röntgenbau, Ilmenau, Germany © 2007 Fraunhofer Institute for Digital Media Technology IDMT Audio Mostly 2007 - 2nd Conference on Interaction with Sound Conference Proceedings ISBN 978-3-00-022823-0 Fraunhofer Institute for Digital Media Technology IDMT Director Prof. Dr.-Ing. Karlheinz Brandenburg Ehrenbergstr. 29 98693 Ilmenau, Germany Tel. +49 (0) 36 77/69-43 41 Fax +49 (0) 36 77/69-43 99 [email protected] www.idmt.fraunhofer.de Copyright and reprint permission: Abstracting is permitted with credit to the source. For other copying, reprint or reproduction permission, please write to Fraunhofer Institute for Digital Media Technology, Ehrenbergstraße 29, 98693 Ilmenau, Germany. © 2007 by Fraunhofer Institute for Digital Media Technology. Printed in Germany Audio Mostly Conference Commitee Committee Katarina Delsing Interactive Institute, Sonic Studio, Piteå, Sweden [email protected] Holger Grossmann Fraunhofer Institute for Digital Media Technology, Ilmenau, Germany [email protected] Stuart Cunningham University of Wales, Wrexham, UK [email protected] Lilian Johansson Interactive Institute, Sonic Studio, Piteå, Sweden [email protected] Mats Liljedahl Interactive Institute Sonic Studio, Piteå, Sweden [email protected] David Moffat Glasgow Caledonian University, Glasgow, UK [email protected] Nigel Papworth Interactive Institute, Sonic Studio, Piteå, Sweden [email protected] Niklas Roeber Otto von Guericke University of Magdeburg, Germany [email protected] Local Organization Local Arrangements Yvonne Bäro [email protected] Promotion, Proceedings Henning Köhler [email protected] Registration Philipp Meyer [email protected] Contents Ingerl, Andreas; Döring, Nicola Visualization of Music – Reception and Semiotics ........................................................................ -

Návrhy Noriem IEC 2014-05
NÁVRHY NORIEM IEC PREDLOŽENÝCH NA VEREJNÉ PREROKOVANIE za obdobie od 1. mája 2014 do 31. mája 2014 Documents Title Closing Date 3/1179/CDV Industrial systems, installations and equipment and industrial products, designation of signals - Part 1: Basic rules 2014-08-15 3D/227/CD IEC 61360-1/Ed4: STANDARD DATA ELEMENTS TYPES WITH ASSOCIATED CLASSIFICATION SCHEME FOR 2014-08-15 ELECTRIC ITEMS - Part 1: Definitions - Principles and methods 9/1933/FDIS IEC 61375-2-5 Ed.1: Electronic railway equipment - Train communication network - Part 2-5: ETB - Ethernet Train Backbone 2014-07-11 9/1938/CD IEC 62912 Ed.1: Railway applications - Direct current signalling monostable relays of type N and type C 2014-08-15 9/1940/CD IEC 62917 Ed.1: Railway applications - Fixed installations - Electric traction - Copper and copper alloy grooved contact wires 2014-08-15 13/1581/CD IEC 62056-7-5/Ed.1: ELECTRICITY METERING DATA EXCHANGE - THE DLMS/COSEM SUITE - Part 7-5: Communication 2014-09-05 profiles for local data transmission 13/1582/CD IEC/TS 62056-9-1/Ed.1: ELECTRICITY METERING DATA EXCHANGE - Part 9-1: Communication Profile using web-services 2014-09-05 to access a DLMS/COSEM Server via a COSEM Access Service (CAS) 14/787/CD IEC 60076-57-1202 Ed.1: Power transformers - Liquid immersed phase-shifting transformers 2014-09-05 17A/1065/CD IEC 62271-1 Ed.2: High-voltage switchgear and controlgear - Part 1: Common specifications for alternating current 2014-09-05 switchgear and controlgear 17C/605/CD IEC 62271-212 Ed.1: High-voltage switchgear and controlgear -

Sony Seq-411 User Manual
Sony Seq-411 User Manual Lastmanuals provides you a fast and easy access to the user manual SONY SEQ-411. We hope that this SONY SEQ-411 user guide will be useful to you. sony seq-333 stereo graphic equalizer If you have any documentation for this model, for example owners manual, SEQ-401 · Sony SEQ-411 User login. SEQ-41 1. Operating Instructions. Before operating the unit, please read this SEQ-411. To prevent fire or shock hazard, do not expose the unit to rain. SONY SEQ-411 Graphic Equalizer Operating Instructions / manual SONY SEQ-11 EQUALIZER SERVICE MANUAL FACTORY ORIGINAL. £3.31. Sony SEQ-411 INFO SHEET / Sony SEQ-411 USER MANUAL / Sony SEQ-411 SERVICE MANUAL / Sony SEQ- 411 REMOTE REPLACEMENT. SONY - RM AV2100 - Remote Control - User Manual.pdf SONY - SEN 280 - User Manual - Pages 16.pdf SONY - SEQ 411 - Service Bulletin n.304.pdf Sony Seq-411 User Manual Read/Download sony seq-5 stereo graphic equalizer If you have any documentation for this model, for example owners manual, SEQ-401 · Sony SEQ-411 User login. We've updated the eBay and PayPal User Agreements and Privacy Notices. Learn more SONY OEM SEQ-411 GRAPHIC EQUALIZER SERVICE MANUAL. SONY SEQ-411 Graphic Equalizer Operating Instructions / manual, 4 GBP, 2015-08-23, Show. Sony SEQ-411 7 Band Graphic Equalizer, 95 EUR, 2015-09-10. Rare Sony Program Equalizer SEQ-333ES in Consumer Electronics, TV, Video & Home Audio, TV, Video & Audio Service Manual for Sony SEQ-H4900 Equ. Sony Equalizer SEQ-411 Stereo 2 x 7 Band HiFi Graphic EQ mit Spectrum Analyzer Sony SEQ-411 Graphic Equalizer Operating Instructions / manual. -

Chapter 1 - Introduction 1
AN INVESTIGATION INTO THE USE OF IEEE 1394 FOR AUDIO AND CONTROL DATA DISTRIBUTION IN MUSIC STUDIO ENVIRONMENTS. A thesis submitted in fulfilment of the requirements for the degree of MASTER OF SCIENCE of RHODES UNIVERSITY By ROBERT ALAN LAUBSCHER February 1999 Abstract i Abstract This thesis investigates the feasibility of using a new digital interconnection technology, the IEEE-1394 High Performance Serial Bus, for audio and control data distribution in local and remote music recording studio environments. Current methods for connecting studio devices are described, and the need for a new digital interconnection technology explained. It is shown how this new interconnection technology and developing protocol standards make provision for multi-channel audio and control data distribution, routing, copyright protection, and device synchronisation. Feasibility is demonstrated by the implementation of a custom hardware and software solution. Remote music studio connectivity is considered, and the emerging standards and technologies for connecting future music studio utilising this new technology are discussed. Acknowledgements ii Acknowledgements I gratefully acknowledge the significant help and guidance received from Richard Foss, the supervisor of my work. I would also like to thank the people from industry who have shown interest in this work and provided answers to my many questions, especially Bob Moses, Robert Sloan, Yoshi Sawada, and Dick Scheel. The reader should be aware that many trademarks are mentioned throughout this thesis. -
V2616 Linux User's Manual Introduction
V2616 Linux User’s Manual First Edition, October 2011 www.moxa.com/product © 2011 Moxa Inc. All rights reserved. V2616 Linux User’s Manual The software described in this manual is furnished under a license agreement and may be used only in accordance with the terms of that agreement. Copyright Notice © 2011 Moxa Inc. All rights reserved. Trademarks The MOXA logo is a registered trademark of Moxa Inc. All other trademarks or registered marks in this manual belong to their respective manufacturers. Disclaimer Information in this document is subject to change without notice and does not represent a commitment on the part of Moxa. Moxa provides this document as is, without warranty of any kind, either expressed or implied, including, but not limited to, its particular purpose. Moxa reserves the right to make improvements and/or changes to this manual, or to the products and/or the programs described in this manual, at any time. Information provided in this manual is intended to be accurate and reliable. However, Moxa assumes no responsibility for its use, or for any infringements on the rights of third parties that may result from its use. This product might include unintentional technical or typographical errors. Changes are periodically made to the information herein to correct such errors, and these changes are incorporated into new editions of the publication. Technical Support Contact Information www.moxa.com/support Moxa Americas Moxa China (Shanghai office) Toll-free: 1-888-669-2872 Toll-free: 800-820-5036 Tel: +1-714-528-6777 Tel: +86-21-5258-9955 Fax: +1-714-528-6778 Fax: +86-21-5258-5505 Moxa Europe Moxa Asia-Pacific Tel: +49-89-3 70 03 99-0 Tel: +886-2-8919-1230 Fax: +49-89-3 70 03 99-99 Fax: +886-2-8919-1231 Table of Contents 1.