Characterisation of Running Specific Prostheses and Its Effect on Sprinting Performance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Disability Classification System
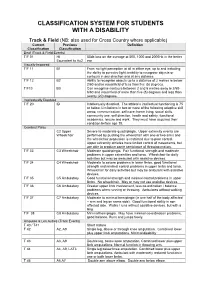
CLASSIFICATION SYSTEM FOR STUDENTS WITH A DISABILITY Track & Field (NB: also used for Cross Country where applicable) Current Previous Definition Classification Classification Deaf (Track & Field Events) T/F 01 HI 55db loss on the average at 500, 1000 and 2000Hz in the better Equivalent to Au2 ear Visually Impaired T/F 11 B1 From no light perception at all in either eye, up to and including the ability to perceive light; inability to recognise objects or contours in any direction and at any distance. T/F 12 B2 Ability to recognise objects up to a distance of 2 metres ie below 2/60 and/or visual field of less than five (5) degrees. T/F13 B3 Can recognise contours between 2 and 6 metres away ie 2/60- 6/60 and visual field of more than five (5) degrees and less than twenty (20) degrees. Intellectually Disabled T/F 20 ID Intellectually disabled. The athlete’s intellectual functioning is 75 or below. Limitations in two or more of the following adaptive skill areas; communication, self-care; home living, social skills, community use, self direction, health and safety, functional academics, leisure and work. They must have acquired their condition before age 18. Cerebral Palsy C2 Upper Severe to moderate quadriplegia. Upper extremity events are Wheelchair performed by pushing the wheelchair with one or two arms and the wheelchair propulsion is restricted due to poor control. Upper extremity athletes have limited control of movements, but are able to produce some semblance of throwing motion. T/F 33 C3 Wheelchair Moderate quadriplegia. Fair functional strength and moderate problems in upper extremities and torso. -
Ifds Functional Classification System & Procedures
IFDS FUNCTIONAL CLASSIFICATION SYSTEM & PROCEDURES MANUAL 2009 - 2012 Effective – 1 January 2009 Originally Published – March 2009 IFDS, C/o ISAF UK Ltd, Ariadne House, Town Quay, Southampton, Hampshire, SO14 2AQ, GREAT BRITAIN Tel. +44 2380 635111 Fax. +44 2380 635789 Email: [email protected] Web: www.sailing.org/disabled 1 Contents Page Introduction 5 Part A – Functional Classification System Rules for Sailors A1 General Overview and Sailor Evaluation 6 A1.1 Purpose 6 A1.2 Sailing Functions 6 A1.3 Ranking of Functional Limitations 6 A1.4 Eligibility for Competition 6 A1.5 Minimum Disability 7 A2 IFDS Class and Status 8 A2.1 Class 8 A2.2 Class Status 8 A2.3 Master List 10 A3 Classification Procedure 10 A3.0 Classification Administration Fee 10 A3.1 Personal Assistive Devices 10 A3.2 Medical Documentation 11 A3.3 Sailors’ Responsibility for Classification Evaluation 11 A3.4 Sailor Presentation for Classification Evaluation 12 A3.5 Method of Assessment 12 A3.6 Deciding the Class 14 A4 Failure to attend/Non Co-operation/Misrepresentation 16 A4.1 Sailor Failure to Attend Evaluation 16 A4.2 Non Co-operation during Evaluation 16 A4.3 International Misrepresentation of Skills and/or Abilities 17 A4.4 Consequences for Sailor Support Personnel 18 A4.5 Consequences for Teams 18 A5 Specific Rules for Boat Classes 18 A5.1 Paralympic Boat Classes 18 A5.2 Non-Paralympic Boat Classes 19 Part B – Protest and Appeals B1 Protest 20 B1.1 General Principles 20 B1.2 Class Status and Protest Opportunities 21 B1.3 Parties who may submit a Classification Protest -

Athletes with Physical, Visual and Intellectual Impairments
Para Athletes (Athletes with Physical, Visual and Intellectual Impairments) • Events offered are 100m, 200m, 400m, 4x100m Relay (mixed classification/age/gender), discus, shot put, javelin, high jump and long jump. Para Athletes who wish to compete in other events need to apply to the organizing committee through their managers. Classification Athletes with Physical, Visual and Intellectual Impairments competing at the 2021 North Island Secondary Schools Athletics Championships in Hamilton are required to have a Provisional or National Classification. Classification ensures that athletes meet impairment eligibility and have an activity limitation Athletes who do not have a Provisional or National Classification will need to have completed one of the Provisional Classification forms(Physical, Intellectual or Visual Impairment, whichever is the most appropriate one) available on the Athletics NZ website www.athletics.org.nz or the NZSSAA website www.nzssaa.org.nz in the North Island Championships information. This form needs to be forwarded to [email protected] as soon as possible and no later than 26 March. Classifications and Competition Para Athletes will have a track classification (T) and a field classification (F). The following track and field classifications relate to the following impairments. T11 – T13 and F11 – F13 Visual Impairment (VI) T20 and F20 Intellectual Impairment(II) T32 – T38 and F31 – F38 Cerebral Palsy and Neurological Impairments(CP) T40 - T41 and F40 - F41 Short Stature(SS) T42 – T47 and F42 – F46 Amputees and Other Impairments (AO) T51 – T54 and F51 – F57 Wheelchair and throwing frame user (WC) T61 – T64 and F61 - 64 Athletes who compete using prosthetic lower limbs (PL) There will be two competition divisions, Para Athletes with Intellectual Impairment (II) and Para Athletes with Physical Impairment, including Para Athletes with Visual Impairment (PI). -

Athletics Classification Rules and Regulations 2
IPC ATHLETICS International Paralympic Committee Athletics Classifi cation Rules and Regulations January 2016 O cial IPC Athletics Partner www.paralympic.org/athleticswww.ipc-athletics.org @IPCAthletics ParalympicSport.TV /IPCAthletics Recognition Page IPC Athletics.indd 1 11/12/2013 10:12:43 Purpose and Organisation of these Rules ................................................................................. 4 Purpose ............................................................................................................................... 4 Organisation ........................................................................................................................ 4 1 Article One - Scope and Application .................................................................................. 6 International Classification ................................................................................................... 6 Interpretation, Commencement and Amendment ................................................................. 6 2 Article Two – Classification Personnel .............................................................................. 8 Classification Personnel ....................................................................................................... 8 Classifier Competencies, Qualifications and Responsibilities ................................................ 9 3 Article Three - Classification Panels ................................................................................ 11 4 Article Four -

6436 a Alco Dip Switches
DIP Switches A DIP Switches GD Series - Page A3 GDH Series - Page A5 AD Series - Page A7 7000 Series - Page A11 7100 Series - Page A17 S Series - Page A18 MRD Series - Page A21 DRD Series - Page A23 DR Series - Page A25 A1 Catalog 1308390 Dimensions are in inches Dimensions are shown for USA: 1-800-522-6752 South America: 55-11-3611-1514 Issued 9-04 and millimeters unless otherwise reference purposes only. Canada: 1-905-470-4425 Hong Kong: 852-2735-1628 specified. Values in parentheses Specifications subject Mexico: 01-800-733-8926 Japan: 81-44-844-8013 www.tycoelectronics.com or brackets are metric equivalents. to change. C. America: 52-55-5-729-0425 UK: 44-141-810-8967 DIP Switches DIP Switch Part Number Index A ADE02 …………………A7 ADF07……………………A8 ADPA05S ………………A9 GDR02 …………………A5 ADE02S …………………A7 ADF07S …………………A8 ADPA05SA………………A9 GDR02S …………………A5 ADE02SA ………………A7 ADF07SA ………………A8 ADPA06 …………………A9 GDR04 …………………A5 ADE03 …………………A7 ADF07SAT………………A8 ADPA06S ………………A9 GDR04S …………………A5 ADE03S …………………A7 ADF07ST ………………A8 ADPA06SA………………A9 GDR06 …………………A5 ADE03SA ………………A7 ADF07STTR ……………A8 ADPA07 …………………A9 GDR06S …………………A5 ADE04 …………………A7 ADF07T …………………A8 ADPA07S ………………A9 GDR08 …………………A5 ADE04S …………………A7 ADF08……………………A8 ADPA07SA………………A9 GDR08S …………………A5 DIP Switches ADE04SA ………………A7 ADF08S …………………A8 ADPA08 …………………A9 GDR10 …………………A5 ADE05 …………………A7 ADF08SA ………………A8 ADPA08S ………………A9 GDR10S …………………A5 ADE05S …………………A7 ADF08SAT………………A8 ADPA08SA………………A9 GDS02……………………A3 ADE05SA ………………A7 ADF08ST ………………A8 ADPA09 …………………A9 GDS02NTS………………A3 ADE06 …………………A7 ADF08STTR -

A New Dynamical Core of the Global Environmental Multiscale (GEM) Model with a Height-Based Terrain-Following Vertical Coordinate
JULY 2019 H U S A I N E T A L . 2555 A New Dynamical Core of the Global Environmental Multiscale (GEM) Model with a Height-Based Terrain-Following Vertical Coordinate SYED ZAHID HUSAIN,CLAUDE GIRARD, AND ABDESSAMAD QADDOURI Atmospheric Numerical Prediction Research Section, Meteorological Research Division, Environment and Climate Change Canada, Dorval, Quebec, Canada ANDRÉ PLANTE Canadian Meteorological Centre, Environment and Climate Change Canada, Dorval, Quebec, Canada (Manuscript received 20 December 2018, in final form 7 May 2019) ABSTRACT A new dynamical core of Environment and Climate Change Canada’s Global Environmental Multiscale (GEM) atmospheric model is presented. Unlike the existing log-hydrostatic-pressure-type terrain- following vertical coordinate, the proposed core adopts a height-based approach. The move to a height- based vertical coordinate is motivated by its potential for improving model stability over steep terrain, which is expected to become more prevalent with the increasing demand for very high-resolution forecasting systems. A dynamical core with height-based vertical coordinate generally requires an it- erative solution approach. In addition to a three-dimensional iterative solver, a simplified approach has been devised allowing the use of a direct solver for the new dynamical core that separates a three- dimensional elliptic boundary value problem into a set of two-dimensional independent Helmholtz problems. The issue of dynamics–physics coupling has also been studied, and incorporating the physics tendencies within the discretized dynamical equations is found to be the most acceptable approach for the height-based vertical coordinate. The new dynamical core is evaluated using numerical experiments that include two-dimensional nonhydrostatic theoretical cases as well as 25-km resolution global fore- casts. -
A9.880 P 1 of 15 Amendment of Attachment 2 Only Prepared By
A9.880 P 1 of 15 Amendment of Attachment 2 only prepared by Mānoa Career Center. This replaces Administrative Procedure No. A9.880 dated January 2011. _ September 2013 Student Employment A9.880 Policies and Procedures on Student Employment 1. Purpose. To promulgate policies and procedures governing the employment of students by the University of Hawai'i to provide for a student classification and pay plan; and to establish the conditions of employment for students. 2. Applicability. The provisions of this directive apply to all campuses and affiliated agencies employing University of Hawai'i students. Campuses may establish additional procedures on student employment provided that they are in conformance with the provisions of this procedure. 3. Definitions. a. Student Assistants. Students who are employed by the University of Hawai'i or affiliate agencies while pursuing a certificate, degree or professional diploma. This employment, regardless of funding source, is a form of financial assistance enabling the students to pursue their education. Student employment is intended to provide students with an opportunity to meet their educational objective, therefore, student assistants are not regular employees of the University and are not entitled to the same fringe benefits. b. Campus Student Employment Office. That office of the campus which is responsible for the classification of student assistant positions, the finalizing of student assistant applications, and the placing of student assistants. A9.880 P 2 of 15 Individual campuses may make provisions to delegate these functions to other campus offices as may be appropriate to meet special campus needs. This office is responsible for the enforcement of these policies and is authorized to initiate necessary payroll transactions when violations persist (e.g. -

Judicial Magistrate Court, Tiruttani Present : Thiru. V
JUDICIAL MAGISTRATE COURT, TIRUTTANI PRESENT : THIRU. V. LOGANATHAN, B.A., L.L.B., D.No .1072/ 2021 Dated 31.12.2020 COVID19 ADVANCE SPECIAL CAUSE LIST, FOR 04.01.2021 (As per the OM. In D.No 5050/A/2020 dated 24.09.2020 of the Hon'ble Principal District Sessions Judge, Tiruvallur) S. Case No. Name of Parties Name of the counsel Date of Stage of the case No. Hearing 1. CC.25/2015 SI of Police App for prosecution 04.01.2021 Served summons K.K.Chatram P.S. and of Lw8, Lw12 & Vs V. Venkatesan Lw14 Parthasarathi 2. CC/79/2015 SI of Police App for prosecution 04.01.2021 SS of lw8 and Thiruvalangadu P.S. and lw10(I.O) Vs R. Sivaraj Surendhar and 3 others 3. CC.256/2014 SI of Police App for prosecution 04.01.2021 Served summons K.K. Chatramp P.S. and of Lw11 to Vs R. Sivaraj Lw13 Ramesh 4. CC.41/2012 SI of Police App for prosecution 04.01.2021 Served summons K.K.Chatram P.S. and of Lw1 to Lw7 Vs N. Mohanraj Murali 5. CC/204/2013 SI of Police App for prosecution 04.01.2021 For Judgement Tiruvalangadu P.S. and Vs V. Kishore reddy Sumath & 2 others 6. CC.124//2015 SI of Police App for prosecution 04.01.2021 For Judgement Tiruttani P.S. and Vs V.Reezar Nagappan 7. CC/201/2015 SI of Police App for prosecution 04.01.2021 Fresh summon Tiruttani P.S. and to lw2 lw3 and Vs Thirunavukarasu lw5 Maridoss 8. -

Entenda Como Funciona a Divisão Por Classes Dos Esportes Paralímpicos : Sem Barreiras
09/09/2016 Entenda como funciona a divisão por classes dos esportes paralímpicos : Sem Barreiras Entenda como funciona a divisão por classes dos esportes paralímpicos : Sem Barreiras No basquete em cadeira de rodas, cada atleta é classificado de acordo com comprometimento físico-motor. O primeiro tipo de classificação para pessoas com deficiência física foi desenvolvido ainda no início do esporte para deficientes, que ocorreu na Inglaterra, em 1944, por meio de médicos e especialistas da área de reabilitação. Com o número crescente de atletas, a melhora considerável da performance e os avanços tecnológicos, muitas modificações têm sido feitas na tentativa de realinhar o esporte de alto rendimento para deficientes a uma classificação que acompanhe essa evolução. Conceitualmente, a classificação utilizada hoje na prática do desporto adaptado constitui-se em um favor de nivelamento entre os aspectos da capacidade física e competitiva, colocando as deficiências semelhantes em um grupo determinado. Isso permite oportunizar a competição entre indivíduos com várias seqüelas de deficiência, pois o sistema de classificação eficiente é o pré-requisito para uma competição mais equiparada. O Comitê Paraolímpico Internacional reconhece cinco categorias de deficiência para a participação em competições do IPC: paralisados cerebrais, deficientes visuais, atletas em cadeira de rodas, amputados e les autres. Aqui no País No Brasil, o método foi usado pela primeira vez em 1984, no campeonato de Basquete de Rodas (ABRADECAR). Na década de 90, com a introdução da classificação funcional no basquete, também foram propostas mudanças no atletismo. Como Funciona a Classificação Cada esporte determina seu próprio sistema de classificação, baseado nas habilidades funcionais, identificando as áreas chaves que afetam o desempenho para a performance básica do esporte escolhido. -

Document Owner Suela Kodra Data Classification Confidential
Document Classification: Public Statement of Applicability, Version 2.0, 4 May 2021 Legend for Reasons for Controls Selection LR: Legal Requirements,CO: Contractual Obligations,BR/BP: Business Requirements/Adopted Best Practices,RRA: Results of Risk Assessment Section Information security control Reference Applicable A5 Information security policies A5.1 Management direction for information security Information_Security_Policy; ISMS Yes A5.1.1 Policies for information security Manual; Security Concept A5.1.2 Review of the policies for information security Document_and_Policy Management Yes A6 Organization of information security A6.1 Internal organization ISMS Manual; Information_Security_Policy; Job Yes A6.1.1 Information security roles and responsibilities descriptions ISMS Manual; Information_Security_Policy; Yes A6.1.2 Segregation of duties Access_Control_Policy Computer_Security_Incident_Respon Yes A6.1.3 Contact with authorities se_Plan (Annex II) Computer_Security_Incident_Respon Yes A6.1.4 Contact with special interest groups se_Plan (Annex II) Information Security Risk Management Policy; Software Yes A6.1.5 Information security in project management Development Process A6.2 Mobile devices and teleworking A6.2.1 Mobile device policy Mobile_Device_Policy Yes A6.2.2 Teleworking Teleworking_Policy Yes A7 Human resource security A7.1 Prior to employment A7.1.1 Screening On_Off Boarding Checkliste Yes A7.1.2 Terms and conditions of employment Safety io Arbeitsvertrag_AT Yes A7.2 During employment Information_Security_Policy; ISMS Yes -
US SAILING FUNCTIONAL CLASSIFICATION SYSTEM & PROCEDURES MANUAL 2013—2016 Effective—1 January 2013
[Type text ] [Type text ] [Type text ] US SAILING FUNCTIONAL CLASSIFICATION SYSTEM & PROCEDURES MANUAL 2013—2016 Effective—1 January 2013 Originally Published—May 2013 US Sailing Member of the PO Box 1260 15 Maritime Drive Portsmouth, RI 02871-0907 Phone: 1-401-683-0800 / Toll free: 1-800-USSAIL - (1-800-877-2451) Fax: 401-683-0840 E-Mail: [email protected] International Paralympic Committee Roger H S trube, MD – A pril 20 13 1 ROGE R H STRUBE, MD – APRIL 2013 [Type text ] [Type text ] [Type text ] Contents Introduction .................................................................................................................................................... 6 Appendix to Introduction – Glossary of Medical Terminology .......................................................................... 7 Joint Movement Definitions: ........................................................................................................................... 7 Neck ........................................................................................................................................................ 7 Shoulder .................................................................................................................................................. 7 Elbow ...................................................................................................................................................... 7 Wrist ...................................................................................................................................................... -

University of Georgia 2021 Indoor Track & Field
University of Georgia 2021 INdoor Track & Field georgiadogs.com // : @UGATrack 2021 Indoor Schedule Where To Catch The 2021 NCAA Championships Date Event (Location) Results The NCAA Indoor Championships will air LIVE on Jan. 15-16 Clemson Invitational (Clemson, SC) NTS ESPN3 all three days. There will also be an ESPNU tape Jan. 23 Carolina Challenge (Columbia, SC) NTS delay special of the meet on Tuesday. ESPN3 LIVE: Jan. 29-30 Razorback Invitational (Fayetteville, ARK) NTS Thursday, March 11 (12pmET) - gado.gs/6hb Feb. 5-6 South Carolina Invitational (Columbia) NTS Friday, March 12 (2:45pm) - gado.gs/6hd; Feb. 12-13 Tiger Paw Invitational (Clemson) NTS (7:15pm) - gado.gs/6hf Feb. 12-13 Music City Challenge (Nashville, TN) NTS Saturday, March 13 (1:30pm) - gado.gs/6hh; Feb. 13 USC Indoor Open (Columbia) NTS (6pm) - gado.gs/6hj Feb. 25-27 SEC Championships (Fayetteville) W-3 (69), M-10 (31) TROPHY CEREMONY (9pm): gado.gs/6hl March 11-13 NCAA Championships (Fayetteville) ESPN Tape Delay Special: Sunday, March 14 (9 p.m.) Georgia Returns To Fayetteville Eyeing NCAA Hardware in both the shot put (67-6.25) and weight throw (76-6.25) as The fourth-ranked Georgia women and the sixth-ranked Bulldog men made he wrapped up his UGA indoor time. Keenon Laine completed the trip to Fayetteville, Ark., on Wednesday before the NCAA Indoor Track & Field his indoor career with a 7-3.75 clearance in the high jump and Championships begin on Thursday and continue through Saturday. Johannes Erm scored 5,817 in the heptathlon as both scored When Do The Dogs Start On Day One?: Sophomore Karel Tilga and fifth Erm( qualified for the 2021 meet but was a medical scratch redshirt sophomore Kyle Garland will start the meet in the heptathlon on Thursday at after injuring himself during this year’s heptathlon at the SEC 12 p.m.