CSCI 350 Ch. 2 – the Kernel Abstraction & Protection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

BIOS Boot Specification
Compaq Computer Corporation Phoenix Technologies Ltd. Intel Corporation BIOS Boot Specification Version 1.01 January 11, 1996 This specification has been made available to the public. You are hereby granted the right to use, implement, reproduce, and distribute this specification with the foregoing rights at no charge. This specification is, and shall remain, the property of Compaq Computer Corporation (“Compaq”), Phoenix Technologies Ltd (“Phoenix”), and Intel Corporation (“Intel”). NEITHER COMPAQ, PHOENIX NOR INTEL MAKE ANY REPRESENTATION OR WARRANTY REGARDING THIS SPECIFICATION OR ANY PRODUCT OR ITEM DEVELOPED BASED ON THIS SPECIFICATION. USE OF THIS SPECIFICATION FOR ANY PURPOSE IS AT THE RISK OF THE PERSON OR ENTITY USING IT. COMPAQ, PHOENIX AND INTEL DISCLAIM ALL EXPRESS AND IMPLIED WARRANTIES, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND FREEDOM FROM INFRINGEMENT. WITHOUT LIMITING THE GENERALITY OF THE FOREGOING, NEITHER COMPAQ, PHOENIX NOR INTEL MAKE ANY WARRANTY OF ANY KIND THAT ANY ITEM DEVELOPED BASED ON THIS SPECIFICATION, OR ANY PORTION OF IT, WILL NOT INFRINGE ANY COPYRIGHT, PATENT, TRADE SECRET OR OTHER INTELLECTUAL PROPERTY RIGHT OF ANY PERSON OR ENTITY IN ANY COUNTRY. Table of Contents 1.0 INTRODUCTION 5 1.1 REVISION HISTORY 5 1.2 RELATED DOCUMENTS 5 1.3 PURPOSE 5 1.4 TERMS 6 2.0 OVERVIEW 9 2.1 DESCRIPTION 9 3.0 IPL DEVICES 10 3.1 REQUIREMENTS FOR IPL DEVICES 10 3.1.1 IPL TABLE 10 3.1.2 PRODUCT NAME STRING 11 3.2 BAIDS 11 3.3 DEVICES WITH PNP EXPANSION HEADERS -

X86 Assembly Language Reference Manual
x86 Assembly Language Reference Manual Part No: 817–5477–11 March 2010 Copyright ©2010 Oracle and/or its affiliates. All rights reserved. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related software documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, the following notice is applicable: U.S. GOVERNMENT RIGHTS Programs, software, databases, and related documentation and technical data delivered to U.S. Government customers are “commercial computer software” or “commercial technical data” pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, the use, duplication, disclosure, modification, and adaptation shall be subject to the restrictions and license terms setforth in the applicable Government contract, and, to the extent applicable by the terms of the Government contract, the additional rights set forth in FAR 52.227-19, Commercial Computer Software License (December 2007). Oracle USA, Inc., 500 Oracle Parkway, Redwood City, CA 94065. -
Operating Systems : Interrupts, Exceptions, and System Calls
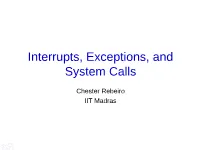
Interrupts, Exceptions, and System Calls Chester Rebeiro IIT Madras OS & Events • OS is event driven – i.e. executes only when there is an interrupt, trap, or system call OS 30 l e v e l e g e 13 l i v User process 1 User process 2 i r P event time 2 Why event driven design? • OS cannot trust user processes – User processes may be buggy or malicious – User process crash should not affect OS • OS needs to guarantee fairness to all user processes – One process cannot ‘hog’ CPU time – Timer interrupts 3 Event Types Events Interrupts Exceptions Hardware Interrupts Software Interrupts 4 Events • Interrupts : raised by hardware or programs to get OS attention – Types • Hardware interrupts : raised by external hardware devices • Software Interrupts : raised by user programs • Exceptions : due to illegal operations 5 Event view of CPU while(fetch next instruction) Current task suspended Execute Instruction Where? If event Execute event yes in handler no 6 Exception & Interrupt Vectors Event occured What to execute next? • Each interrupt/exception provided a number • Number used to index into an Interrupt descriptor table (IDT) • IDT provides the entry point into a interrupt/exception handler • 0 to 255 vectors possible – 0 to 31 used internally – Remaining can be defined by the OS 7 Exception and Interrupt Vectors 8 xv6 Interrupt Vectors • 0 to 31 reserved by Intel • 32 to 63 used for hardware interrupts T_IRQ0 = 32 (added to all hardware IRQs to scale them) • 64 used for system call interrupt ref : traps.h ([31], 3152) 9 Events Events Interrupts Exceptions Hardware Interrupts Software Interrupts 10 Why Hardware Interrupts? • Several devices connected to the CPU – eg. -

The List of All Interrupts That Are Currently Supported by the Emulator
basic 8086 and dos interrupts that are currently supported by the emulator Page 1 of 19 The list of all interrupts that are currently supported by the emulator. These interrupts should be compatible with IBM PC and all generations of x86, original Intel 8086 and AMD compatible microprocessors, however Windows XP may overwrite some of the original interrupts. Quick reference: INT 21h INT 10h/00h INT 21h/35h INT 21h/01h INT 10h/01h INT 10h/1003h INT 21h/39h INT 21h/02h INT 10h/02h INT 11h INT 21h/3Ah INT 21h/05h INT 10h/03h INT 12h INT 21h/3Bh INT 21h/06h INT 10h/05h INT 13h/00h INT 21h/3Ch INT 21h/07h INT 10h/06h INT 13h/02h INT 21h/3Dh INT 33h/0000h INT 21h/09h INT 10h/07h INT 13h/03h INT 21h/3Eh INT 33h/0001h INT 21h/0Ah INT 10h/08h INT 15h/86h INT 21h/3Fh INT 33h/0002h INT 21h/0Bh INT 10h/09h INT 16h/00h INT 21h/40h INT 33h/0003h INT 21h/0Ch INT 10h/0Ah INT 16h/01h INT 21h/41h INT 21h/0Eh INT 10h/0Ch INT 19h INT 21h/42h INT 21h/19h INT 10h/0Dh INT 1Ah/00h INT 21h/47h INT 21h/25h INT 10h/0Eh INT 20h INT 21h/4Ch INT 21h/2Ah INT 10h/13h INT 21h/56h INT 21h/2Ch the short list of supported interrupts with descriptions: INT 10h / AH = 0 - set video mode. input: AL = desired video mode. these video modes are supported: 00h - text mode. -

Chapter 13: 16-Bit MS-DOS Programming
AssemblyAssembly LanguageLanguage forfor IntelIntel--BasedBased Computers,Computers, 44th EditionEdition Kip R. Irvine Chapter 13: 16-Bit MS-DOS Programming (c) Pearson Education, 2002. All rights reserved. ChapterChapter OverviewOverview • MS-DOS and the IBM-PC • MS-DOS Function Calls (INT 21h) Irvine, Kip R. Assembly Language for Intel-Based Computers, 2003. 2 MSMS--DOSDOS andand thethe IBMIBM--PCPC • Real-Address Mode • MS-DOS Memory Organization • MS-DOS Memory Map • Redirecting Input-Output • Software Interrupts • INT Instruction • Interrupt Vectoring Process • Common Interrupts Irvine, Kip R. Assembly Language for Intel-Based Computers, 2003. 3 RealReal--AddressAddress ModeMode • Real-address mode (16-bit mode) programs have the following characteristics: • Max 1 megabyte addressable RAM • Single tasking • No memory boundary protection • Offsets are 16 bits • IBM PC-DOS: first Real-address OS for IBM-PC • Later renamed to MS-DOS, owned by Microsoft Irvine, Kip R. Assembly Language for Intel-Based Computers, 2003. 4 MSMS--DOSDOS MemoryMemory OrganizationOrganization • Interrupt Vector Table • BIOS & DOS data • Software BIOS • MS-DOS kernel • Resident command processor • Transient programs • Video graphics & text • Reserved (device controllers) • ROM BIOS Irvine, Kip R. Assembly Language for Intel-Based Computers, 2003. 5 MSMS--DOSDOS MemoryMemory MapMap Address FFFFF ROM BIOS F0000 Reserved C0000 Video Text & Graphics B8000 VRAM Video Graphics A0000 Transient Command Processor Transient Program Area (available for application programs) -

Computer Organization & Assembly Languages MS-DOS & BIOS-Level
Computer Organization & Assembly Languages MS-DOS & BIOS-level Programming Pu-Jen Cheng Adapted from the slides prepared by Kip Irvine for the book, Assembly Language for Intel-Based Computers, 5th Ed Chapter Overview MS-DOS and the IBM-PC MS-DOS Function Calls (INT 21h) Standard MS -DOS File I/O Services MS-DOS and the IBM-PC Real-Address Mode MS-DOS Memory Organization MS-DOS Memoryyp Map Redirecting Input-Output Software Interrupts INT Instruction Interrupt Vectoring Process Common Interrupts Real-Address Mode Real-address mode (16-bit mode) programs have the following characteristics: ¾ Max 1 megabyte addressable RAM ¾ Singggle tasking ¾ No memory boundary protection ¾ Offsets are 16 bits IBM PC-DOS: first Real-address OS for IBM-PC ¾ Has roots in Gary Kildall's highly successful Digital Research CP/M ¾ Later renamed to MS-DOS, owned by Microsoft Memory Models NEAR and FAR Segments NEAR segment ¾ requires only a 16-bit offset ¾ faster execution than FAR FAR segment ¾ 32-bit offset: requires setting both segment and offset values ¾ slower execution than NEAR .MODEL Directive The .MODEL directive determines the names and grouping of segments .model tiny ¾ code and data belong to same segment (NEAR) ¾ .com file ext ens ion .model small ¾ both code and data are NEAR ¾ data and stack grouped into DGROUP .model medium ¾ code is FAR, data is NEAR .MODEL Directive .model compact ¾ code is NEAR, data is FAR .model huge & .model large ¾ both code and data are FAR .model flat ¾ both code and data are 32-bit NEAR MS-DOS -
X86 Instruction Set Architecture
x86 Instruction Set Architecture Comprehensive 32/64-bit Coverage First Edition Also by Tom Shanley HEAVEN’S FAVORITE —A Novel of Genghis Khan— Book 1, ASCENT: THE RISE OF CHINGGIS KHAN Book 2, DOMINION: DAWN OF THE MONGOL EMPIRE MINDSHARE TECHNICAL TRAINING Please visit www.mindshare.com for a complete description of Mind- Share’s technical offerings: • Books • eBooks • eLearning modules • Public courses • On-site course • On-line courses Intel Core 2 Processor (Penryn) Intel Nehalem Processor Intel Atom Processor AMD Opteron Processor (Barcelona) Intel 32/64-bit x86 Software Architecture AMD 32/64-bit x86 Software Architecture x86 Assembly Language Programming Protected Mode Programming PC Virtualization IO Virtualization (IOV) Computer Architectures with Intel Chipsets Intel QuickPath Interconnect (QPI) PCI Express 2.0 USB 2.0 USB 3.0 Embedded USB 2.0 Workshop PCI PCI-X Modern DRAM Architecture SAS Serial ATA High Speed Design EMI / EMC Bluetooth Wireless Product Development SMT Manufacturing SMT Testing x86 Instruction Set Architecture Comprehensive 32/64-bit Coverage First Edition MINDSHARE, INC. TOM SHANLEY MindShare Press Colorado Springs, USA Refer to “Trademarks” on page 5 for trademark information. The author and publisher have taken care in preparation of this book but make no expressed or implied warranty of any kind and assume no responsibility for errors or omissions. No liability is assumed for incidental or consequential damages in connec- tion with or arising out of the use of the information or programs contained herein. ISBN: 0-9770878-5-3 Copyright © 2009 by MindShare, Inc. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopy- ing, recording, or otherwise, without the prior written permission of the publisher. -

Flare-On 5: Challenge 12 Solution - Suspicious Floppy Disk
Flare-On 5: Challenge 12 Solution - Suspicious Floppy Disk Challenge Author: Nick Harbour Background This challenge is framed as spy tool. You are told that we found a suspicious floppy disk that we suspect was given to spies to transmit secret messages. The spies were given the password but you weren’t. You need to figure out the hidden message. Running the floopy disk I recommend using the Bochs emulator for this challenge. You can start up a minimal x86 VM and add this disk image as a bootable floppy drive. Plus, the bochs image is directly loadable and debuggable with IDA Pro. If you load the floppy correctly with bochs you will see the screen shown in Figure 1 below. FireEye, Inc., 1440 McCarthy Blvd., Milpitas, CA 95035 | +1 408.321.6300 | +1 877.FIREEYE (347.3393) | [email protected] | www.FireEye.com 1 Figure 1: Bochs Initial Bootup Before we attempt to look closer at the contents of the floopy disk we can determine that the program that is launched in the boot sequence that appears to be prompting for the password is named infohelp.exe. If you hit Ctrl-C here it will terminate the batch job (autoexec.bat) and return you to the command prompt. Using the DIR command here will show you the list of files as shown in Figure 2 below. Figure 2: Floppy disk contents You can see from the file timestamps that many of the files on this disk are old. This floopy disk was originally generated with WindowXP using a “format /s” command to create a bootable floppy. -
DOS INTERRUPTS DOSINTS.DOC Page 1 of 117 Page 2 of 117 DOSINTS.DOC Contents
DOS INTERRUPTS DOSINTS.DOC Page 1 of 117 Page 2 of 117 DOSINTS.DOC Contents THE LEGAL WORDS .................................................................................................................................... 13 THE INTERRUPTS ........................................................................................................................................ 14 INT 00 - internal - DIVIDE ERROR ................................ ................................ ................................ ................................ ................................ ............ 14 INT 01 - internal - SINGLE-STEP ................................ ................................ ................................ ................................ ................................ ............... 14 INT 02 - hardware - NMI (NON-MASKABLE INTERRUPT) ................................ ................................ ................................ ................................ 14 INT 03 - ONE-BYTE INTERRUPT ................................ ................................ ................................ ................................ ................................ ............. 14 INT 04 - internal - OVERFLOW ................................ ................................ ................................ ................................ ................................ .................. 14 INT 05 - PRINT-SCREEN KEY ................................ ................................ ................................ ............................... -

Precept 1 Slides from 2013
Project 1: Bootloader COS 318 Fall 2013 Project 1 Schedule ● Design Review – Monday, Sep 23 – 10-min time slots from 11am to 7:40pm ● Due date: Sep 29, 11:55pm General Suggestions ● Read assembly_example.s in start code pkg ● Get bootblock.s working before starting on createimage.c ● Read documentation on AT&T syntax x86 Assembly language ● Read provided documentation on ELF format ● Start as early as you can, and get as much done as possible by the design review Project 1 Overview ● Write a bootloader: bootblock.s – What happens during the boot process of a PC? – Written in x86 Assembly language (AT&T syntax) ● Implement a tool to create a bootable OS image: createimage.c – How are executable files structured? – Become familiar with ELF format Boot Process ● When powered up, nothing in RAM, so how do we get started? – Resort to hardware – Load BIOS from ROM ● BIOS: – Minimal functionality – Initialization of I/O devices – Search for bootable devices Loading the Bootloader ● Found bootable storage volume: – HDD, USB, Floppy – Load bootloader ● How is this done? – Load first sector (512 bytes) – Memory location: 0x7c00 – Switch control to this location to launch the bootloader The Bootloader ● 3 tasks: – Load the kernel into memory – Setup the kernel stack – Switch control to the kernel Let's Review Assembly ● About numbers, need good bookkeeping ● Move data, perform simple arithmetic ● Need a lot of steps to do useful things ● KEY: – Understand memory addresses – Know where things are in memory Memory Addressing ● 1MB of memory – Valid address range: 0x00000 - 0xFFFFF ● Real mode segmented model: – See full 1MB with 20-bit addresses – 16-bit segments and 16-bit offsets ● Addressing format: segment:offset – Actual address = 16*segment + offset – How would you write the address for the bootloader? Registers ● 5 types of CPU registers: – General purpose: ax, bx, cx, dx (can address high or low-order byte via ah/al etc.) – Segment: cs, ds, es, ss – Pointer: ip, bp, sp – Index: di, si – Flags: df, zf (only 9 bits used) ● 32-bit registers have e prefix: e.g. -

Writing a Simple Operating System — from Scratch
i Writing a Simple Operating System | from Scratch by Nick Blundell School of Computer Science, University of Birmingham, UK Draft: December 2, 2010 Copyright c 2009{2010 Nick Blundell Contents Contents ii 1 Introduction 1 2 Computer Architecture and the Boot Process 3 2.1 The Boot Process . 3 2.2 BIOS, Boot Blocks, and the Magic Number . 4 2.3 CPU Emulation . 5 2.3.1 Bochs: A x86 CPU Emulator . 6 2.3.2 QEmu . 6 2.4 The Usefulness of Hexadecimal Notation . 6 3 Boot Sector Programming (in 16-bit Real Mode) 8 3.1 Boot Sector Re-visited . 8 3.2 16-bit Real Mode . 10 3.3 Erm, Hello? . 10 3.3.1 Interrupts . 11 3.3.2 CPU Registers . 11 3.3.3 Putting it all Together . 11 3.4 Hello, World! . 13 3.4.1 Memory, Addresses, and Labels . 13 3.4.2 'X' Marks the Spot . 13 Question 1 . 16 3.4.3 Defining Strings . 16 3.4.4 Using the Stack . 17 Question 2 . 17 3.4.5 Control Structures . 17 Question 3 . 19 3.4.6 Calling Functions . 19 3.4.7 Include Files . 21 3.4.8 Putting it all Together . 21 Question 4 . 21 3.4.9 Summary . 22 ii CONTENTS iii 3.5 Nurse, Fetch me my Steth-o-scope . 22 3.5.1 Question 5 (Advanced) . 23 3.6 Reading the Disk . 23 3.6.1 Extended Memory Access Using Segments . 23 3.6.2 How Disk Drives Work . 24 3.6.3 Using BIOS to Read the Disk .