Operations Research and Management Science
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Product-Form in Queueing Networks
Product-form in queueing networks VRIJE UNIVERSITEIT Product-form in queueing networks ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Vrije Universiteit te Amsterdam, op gezag van de rector magnificus dr. C. Datema, hoogleraar aan de faculteit der letteren, in het openbaar te verdedigen ten overstaan van de promotiecommissie van de faculteit der economische wetenschappen en econometrie op donderdag 21 mei 1992 te 15.30 uur in het hoofdgebouw van de universiteit, De Boelelaan 1105 door Richardus Johannes Boucherie geboren te Oost- en West-Souburg Thesis Publishers Amsterdam 1992 Promotoren: prof.dr. N.M. van Dijk prof.dr. H.C. Tijms Referenten: prof.dr. A. Hordijk prof.dr. P. Whittle Preface This monograph studies product-form distributions for queueing networks. The celebrated product-form distribution is a closed-form expression, that is an analytical formula, for the queue-length distribution at the stations of a queueing network. Based on this product-form distribution various so- lution techniques for queueing networks can be derived. For example, ag- gregation and decomposition results for product-form queueing networks yield Norton's theorem for queueing networks, and the arrival theorem implies the validity of mean value analysis for product-form queueing net- works. This monograph aims to characterize the class of queueing net- works that possess a product-form queue-length distribution. To this end, the transient behaviour of the queue-length distribution is discussed in Chapters 3 and 4, then in Chapters 5, 6 and 7 the equilibrium behaviour of the queue-length distribution is studied under the assumption that in each transition a single customer is allowed to route among the stations only, and finally, in Chapters 8, 9 and 10 the assumption that a single cus- tomer is allowed to route in a transition only is relaxed to allow customers to route in batches. -
Introduction to Queueing Theory Review on Poisson Process
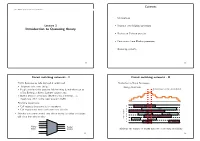
Contents ELL 785–Computer Communication Networks Motivations Lecture 3 Discrete-time Markov processes Introduction to Queueing theory Review on Poisson process Continuous-time Markov processes Queueing systems 3-1 3-2 Circuit switching networks - I Circuit switching networks - II Traffic fluctuates as calls initiated & terminated Fluctuation in Trunk Occupancy Telephone calls come and go • Number of busy trunks People activity follow patterns: Mid-morning & mid-afternoon at All trunks busy, new call requests blocked • office, Evening at home, Summer vacation, etc. Outlier Days are extra busy (Mother’s Day, Christmas, ...), • disasters & other events cause surges in traffic Providing resources so Call requests always met is too expensive 1 active • Call requests met most of the time cost-effective 2 active • 3 active Switches concentrate traffic onto shared trunks: blocking of requests 4 active active will occur from time to time 5 active Trunk number Trunk 6 active active 7 active active Many Fewer lines trunks – minimize the number of trunks subject to a blocking probability 3-3 3-4 Packet switching networks - I Packet switching networks - II Statistical multiplexing Fluctuations in Packets in the System Dedicated lines involve not waiting for other users, but lines are • used inefficiently when user traffic is bursty (a) Dedicated lines A1 A2 Shared lines concentrate packets into shared line; packets buffered • (delayed) when line is not immediately available B1 B2 C1 C2 (a) Dedicated lines A1 A2 B1 B2 (b) Shared line A1 C1 B1 A2 B2 C2 C1 C2 A (b) -

Queueing Theory
Queueing theory Agner Krarup Erlang, a Danish engineer who worked for the Copenhagen Telephone Exchange, published the first paper on what would now be called queueing theory in 1909.[8][9][10] He modeled the number of telephone calls arriving at an exchange by a Poisson process and solved the M/D/1 queue in 1917 and M/D/k queueing model in 1920.[11] In Kendall’s notation: • M stands for Markov or memoryless and means ar- rivals occur according to a Poisson process • D stands for deterministic and means jobs arriving at the queue require a fixed amount of service • k describes the number of servers at the queueing node (k = 1, 2,...). If there are more jobs at the node than there are servers then jobs will queue and wait for service Queue networks are systems in which single queues are connected The M/M/1 queue is a simple model where a single server by a routing network. In this image servers are represented by serves jobs that arrive according to a Poisson process and circles, queues by a series of retangles and the routing network have exponentially distributed service requirements. In by arrows. In the study of queue networks one typically tries to an M/G/1 queue the G stands for general and indicates obtain the equilibrium distribution of the network, although in an arbitrary probability distribution. The M/G/1 model many applications the study of the transient state is fundamental. was solved by Felix Pollaczek in 1930,[12] a solution later recast in probabilistic terms by Aleksandr Khinchin and Queueing theory is the mathematical study of waiting now known as the Pollaczek–Khinchine formula.[11] lines, or queues.[1] In queueing theory a model is con- structed so that queue lengths and waiting time can be After World War II queueing theory became an area of [11] predicted.[1] Queueing theory is generally considered a research interest to mathematicians. -

Delay Models in Data Networks
3 Delay Models in Data Networks 3.1 INTRODUCTION One of the most important perfonnance measures of a data network is the average delay required to deliver a packet from origin to destination. Furthennore, delay considerations strongly influence the choice and perfonnance of network algorithms, such as routing and flow control. For these reasons, it is important to understand the nature and mechanism of delay, and the manner in which it depends on the characteristics of the network. Queueing theory is the primary methodological framework for analyzing network delay. Its use often requires simplifying assumptions since, unfortunately, more real- istic assumptions make meaningful analysis extremely difficult. For this reason, it is sometimes impossible to obtain accurate quantitative delay predictions on the basis of queueing models. Nevertheless, these models often provide a basis for adequate delay approximations, as well as valuable qualitative results and worthwhile insights. In what follows, we will mostly focus on packet delay within the communication subnet (i.e., the network layer). This delay is the sum of delays on each subnet link traversed by the packet. Each link delay in tum consists of four components. 149 150 Delay Models in Data Networks Chap. 3 1. The processinR delay between the time the packet is correctly received at the head node of the link and the time the packet is assigned to an outgoing link queue for transmission. (In some systems, we must add to this delay some additional processing time at the DLC and physical layers.) 2. The queueinR delay between the time the packet is assigned to a queue for trans- mission and the time it starts being transmitted. -

Improving Queuing System Throughput Using Distributed Mean Value Analysis to Control Network Congestion
Communications and Network, 2015, 7, 21-29 Published Online February 2015 in SciRes. http://www.scirp.org/journal/cn http://dx.doi.org/10.4236/cn.2015.71003 Improving Queuing System Throughput Using Distributed Mean Value Analysis to Control Network Congestion Faisal Shahzad1, Muhammad Faheem Mushtaq1, Saleem Ullah1*, M. Abubakar Siddique2, Shahzada Khurram1, Najia Saher1 1Department of Computer Science & IT, The Islamia University of Bahawalpur, Bahawalpur, Pakistan 2College of Computer Science, Chongqing University, Chongqing, China Email: [email protected], [email protected], *[email protected], [email protected], [email protected], [email protected] Received 12 June 2014; accepted 30 January 2015; published 2 February 2015 Copyright © 2015 by authors and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/ Abstract In this paper, we have used the distributed mean value analysis (DMVA) technique with the help of random observe property (ROP) and palm probabilities to improve the network queuing system throughput. In such networks, where finding the complete communication path from source to destination, especially when these nodes are not in the same region while sending data between two nodes. So, an algorithm is developed for single and multi-server centers which give more in- teresting and successful results. The network is designed by a closed queuing network model and we will use mean value analysis to determine the network throughput (β) for its different values. For certain chosen values of parameters involved in this model, we found that the maximum net- work throughput for β ≥ 0.7 remains consistent in a single server case, while in multi-server case for β ≥ 0.5 throughput surpass the Marko chain queuing system. -

BUSF 40901-1/CMSC 34901-1: Stochastic Performance Modeling Winter 2014
BUSF 40901-1/CMSC 34901-1: Stochastic Performance Modeling Winter 2014 Syllabus (January 15, 2014) Instructor: Varun Gupta Office: 331 Harper Center e-mail: [email protected] Phone: 773-702-7315 Office hours: by appointment Class Times: Wed, Fri { 10:10-11:30 am { Harper Center (3A) Final Exam (tentative): March 21, Friday { 8:00-11:00am { Harper Center (3A) Course Website: http://chalk.uchicago.edu Course Objectives This is an introductory course in queueing theory and performance modeling, with applications including but not limited to service operations (healthcare, call centers) and computer system resource management (from datacenter to kernel level). The aim of the course is two-fold: 1. Build insights into best practices for designing service systems (How many service stations should I provision? What speed? How should I separate/prioritize customers based on their service requirements?) 2. Build a basic toolbox for analyzing queueing systems in particular and stochastic processes in general. Tentative list of topics: Open/closed queueing networks; Operational laws; M=M=1 queue; Burke's theorem and reversibility; M=M=k queue; M=G=1 queue; G=M=1 queue; P h=P h=k queues and their solution using matrix-analytic methods; Arrival theorem and Mean Value Analysis; Analysis of scheduling policies (e.g., Last-Come-First Served; Processor Sharing); Jackson network and the BCMP theorem (product form networks); Asymptotic analysis (M=M=k queue in heavy/light traf- fic, Supermarket model in mean-field regime) Prerequisites Exposure to undergraduate probability (random variables, discrete and continuous probability dis- tributions, discrete time Markov chains) and calculus is required. -
Queueing Networks and Insensitivity
Jackson networks EL System QR Queues QR Networks The Arrival Theorem Queueing Networks and Insensitivity Luk´aˇsAdam 29. 10. 2012 Queueing Networks and Insensitivity 1 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Table of contents 1 Jackson networks 2 Insensitivity in Erlang's Loss System 3 Quasi-Reversibility and Single-Node Symmetric Queues 4 Quasi-Reversibility in Networks 5 The Arrival Theorem Queueing Networks and Insensitivity 2 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Reminder Birth{death process M/M/1 One type of customer One node Queueing Networks and Insensitivity 3 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Jackson networks Series of K nodes, not necessarily linear. Arrivals from external sources are independent Poisson processes with intensities α1; : : : ; αK . A customer having completed service at node k goes to node l with probability γkl and leaves the system with probability γk0. A single exponential server at each node with corresponding service rates δ1; : : : ; δK . Queueing Networks and Insensitivity 4 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Closed and open networks Closed network No external inflow of outflow of customers. The number of customers in the network is constant. αk = 0, γk0 = 0. Open network Opposite to closed network. At least one external inflow αk is nonzero. At least one probability of external outflow γk0 is nonzero. Queueing Networks and Insensitivity 5 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Examples Queueing Networks and Insensitivity 6 / 40 Jackson networks EL System QR Queues QR Networks The Arrival Theorem Some propositions Proposition Any ergodic birth-death process is time reversible. -

Product Form Queueing Networks S.Balsamo Dept
Product Form Queueing Networks S.Balsamo Dept. of Math. And Computer Science University of Udine, Italy Abstract Queueing network models have been extensively applied to represent and analyze resource sharing systems such as communication and computer systems and they have proved to be a powerful and versatile tool for system performance evaluation and prediction. Product form queueing networks have a simple closed form expression of the stationary state distribution that allow to define efficient algorithms to evaluate average performance measures. We introduce product form queueing networks and some interesting properties including the arrival theorem, exact aggregation and insensitivity. Various special models of product form queueing networks allow to represent particular system features such as state-dependent routing, negative customers, batch arrivals and departures and finite capacity queues. 1 Introduction and Short History System performance evaluation is often based on the development and analysis of appropriate models. Queueing network models have been extensively applied to represent and analyze resource sharing systems, such as production, communication and computer systems. They have proved to be a powerful and versatile tool for system performance evaluation and prediction. A queueing network model is a collection of service centers representing the system resources that provide service to a collection of customers that represent the users. The customers' competition for the resource service corresponds to queueing into the service centers. The analysis of the queueing network models consists of evaluating a set of performance measures, such as resource utilization and throughput and customer response time. The popularity of queueing network models for system performance evaluation is due to a good balance between a relative high accuracy in the performance results and the efficiency in model analysis and evaluation. -
Introduction to Queueing Theory Review on Poisson Process
Contents ELL 785–Computer Communication Networks Motivations Lecture 3 Discrete-time Markov processes Introduction to Queueing theory Review on Poisson process Continuous-time Markov processes Queueing systems 3-1 3-2 Circuit switching networks - I Circuit switching networks - II Traffic fluctuates as calls initiated & terminated Fluctuation in Trunk Occupancy Telephone calls come and go • Number of busy trunks People activity follow patterns: Mid-morning & mid-afternoon at All trunks busy, new call requests blocked • office, Evening at home, Summer vacation, etc. Outlier Days are extra busy (Mother’s Day, Christmas, ...), • disasters & other events cause surges in traffic Providing resources so Call requests always met is too expensive 1 active • Call requests met most of the time cost-effective 2 active • 3 active Switches concentrate traffic onto shared trunks: blocking of requests 4 active active will occur from time to time 5 active Trunk number Trunk 6 active active 7 active active Many Fewer lines trunks – minimize the number of trunks subject to a blocking probability 3-3 3-4 Packet switching networks - I Packet switching networks - II Statistical multiplexing Fluctuations in Packets in the System Dedicated lines involve not waiting for other users, but lines are • used inefficiently when user traffic is bursty (a) Dedicated lines A1 A2 Shared lines concentrate packets into shared line; packets buffered • (delayed) when line is not immediately available B1 B2 C1 C2 (a) Dedicated lines A1 A2 B1 B2 (b) Shared line A1 C1 B1 A2 B2 C2 C1 C2 A (b) -

Queueing Networks 1 QUEUEING NETWORKS
J. Virtamo 38.3143 Queueing Theory / Queueing networks 1 QUEUEING NETWORKS A network consisting of several interconnected queues Network of queues • Examples Customers go form one queue to another in post office, bank, supermarket etc • Data packets traverse a network moving from a queue in a router to the queue in another • router History Burke’s theorem, Burke (1957), Reich (1957) • Jackson (1957, 1963): open queueing networks, product form solution • Gordon and Newell (1967): closed queueing networks • Baskett, Chandy, Muntz, Palacios (1975): generalizations of the types of queues • Reiser and Lavenberg (1980, 1982): mean value analysis, MVA • J. Virtamo 38.3143 Queueing Theory / Queueing networks 2 Jackson’s queueing network (open queueing network) Jackson’s open queueing network consists of M nodes (queues) with the following assumptions: Node i is a FIFO queue • – unlimited number of waiting places (infinite queue) Service time in the queue obeys the distribution Exp(µ ) • i – in each queue, the service time of the customer is drawn independent of the service times in other queues – note: in a packet network the sending time of a packet, in reality, is the same in all queues (or differs by a constant factor, the inverse of the line speed) – this dependence, however, does not markedly affect the behaviour of the system (so called Kleinrock’s independence assumption) Upon departure from queue i, the customer chooses the next queue j randomly with the • probability qi,j or exits the network with the probability qi,d (probabilistic routing) – the model can be extended to cover the case of predetermined routes (route pinning) The network is open to arrivals from outside of the network (source) • – from the source s customers arrive as a Poisson stream with intensity λ – fraction qs,i of them enter queue i (intensity λqs,i) J. -

A Course Material on Probability and Queueing Theory by Mrs. V
A Course Material on Probability and Queueing Theory By Mrs. V.Sumathi ASSISTANT PROFESSOR DEPARTMENT OF SCIENCE AND HUMANITIES SASURIE COLLEGE OF ENGINEERING VIJAYAMANGALAM – 638 056 QUALITY CERTIFICATE This is to certify that the e-course material Subject Code : MA6453 Subject : Probability and Queueing Theory Class : II Year CSE being prepared by me and it meets the knowledge requirement of the university curriculum. Signature of the Author Name: V. Sumathi Designation: AP This is to certify that the course material being prepared by Mss. V.Sumathi is of adequate quality. He has referred more than five books amont them minimum one is from aborad author. Signature of HD Name: Mrs. P. Murugapriya SEAL S.NO CONTENTS Page.NO UNIT I RANDOM VARIABLES 1 Introduction 1 2 Discrete Random Variables 2 3 Continuous Random Variables 5 4 Moments 14 5 Moment generating functions 14 6 Binomial distribution 18 7 Poisson distribution 21 8 Geometric distribution 25 9 Uniform distribution 27 10 Exponential distribution 29 11 Gamma distribution 31 UNIT II TWO –DIMENSIONAL RANDOM VARIABLES 11 Introduction 36 12 Joint distribution 36 13 Marginal and Conditional Distribution 38 14 Covariance 42 15 Correlation Coefficient 42 16 Problems 43 17 Linear Regression 40 18 Transformation of random variables 45 19 Problems 46 UNIT III RANDOM PROCESSES 20 Introduction 49 21 Classification 50 22 stationary processes 51 23 Markov processes 55 24 Poisson processes 61 25 Discrete parameter Markov chains 62 26 Chapman Kolmogorov Equation 63 27 Limiting distribution 64 UNIT -

Layered Queueing Networks – Performance Modelling, Analysis and Optimisation
Layered queueing networks : performance modelling, analysis and optimisation Citation for published version (APA): Dorsman, J. L. (2015). Layered queueing networks : performance modelling, analysis and optimisation. Technische Universiteit Eindhoven. https://doi.org/10.6100/IR784295 DOI: 10.6100/IR784295 Document status and date: Published: 01/01/2015 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.