Queueing Theory and Performance Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fluid M/M/1 Catastrophic Queue in a Random Environment
RAIRO-Oper. Res. 55 (2021) S2677{S2690 RAIRO Operations Research https://doi.org/10.1051/ro/2020100 www.rairo-ro.org FLUID M=M=1 CATASTROPHIC QUEUE IN A RANDOM ENVIRONMENT Sherif I. Ammar1;2;∗ Abstract. Our main objective in this study is to investigate the stationary behavior of a fluid catas- trophic queue of M=M=1 in a random multi-phase environment. Occasionally, a queueing system expe- riences a catastrophic failure causing a loss of all current jobs. The system then goes into a process of repair. As soon as the system is repaired, it moves with probability qi ≥ 0 to phase i. In this study, the distribution of the buffer content is determined using the probability generating function. In addition, some numerical results are provided to illustrate the effect of various parameters on the distribution of the buffer content. Mathematics Subject Classification. 90B22, 60K25, 68M20. Received January 12, 2020. Accepted September 8, 2020. 1. Introduction In recent years, studies on queueing systems in a random environment have become extremely important owing to their widespread application in telecommunication systems, advanced computer networks, and manufacturing systems. In addition, studies on fluid queueing systems are regarded as an important class of queueing theory; the interpretation of the behavior of such systems helps us understand and improve the behavior of many applications in our daily life. A fluid queue is an input-output system where a continuous fluid enters and leaves a storage device called a buffer; the system is governed by an external stochastic environment at randomly varying rates. These models have been well established as a valuable mathematical modeling method and have long been used to estimate the performance of certain systems as telecommunication systems, transportation systems, computer networks, and production and inventory systems. -

The MVA Priority Approximation
The MVA Priority Approximation RAYMOND M. BRYANT and ANTHONY E. KRZESINSKI IBM Thomas J. Watson Research Center and M. SEETHA LAKSHMI and K. MANI CHANDY University of Texas at Austin A Mean Value Analysis (MVA) approximation is presented for computing the average performance measures of closed-, open-, and mixed-type multiclass queuing networks containing Preemptive Resume (PR) and nonpreemptive Head-Of-Line (HOL) priority service centers. The approximation has essentially the same storage and computational requirements as MVA, thus allowing computa- tionally efficient solutions of large priority queuing networks. The accuracy of the MVA approxima- tion is systematically investigated and presented. It is shown that the approximation can compute the average performance measures of priority networks to within an accuracy of 5 percent for a large range of network parameter values. Accuracy of the method is shown to be superior to that of Sevcik's shadow approximation. Categories and Subject Descriptors: D.4.4 [Operating Systems]: Communications Management-- network communication; D.4.8 [Operating Systems]: Performance--modeling and prediction; queuing theory General Terms: Performance, Theory Additional Key Words and Phrases: Approximate solutions, error analysis, mean value analysis, multiclass queuing networks, priority queuing networks, product form solutions 1. INTRODUCTION Multiclass queuing networks with product-form solutions [3] are widely used to model the performance of computer systems and computer communication net- works [11]. The effective application of these models is largely due to the efficient computational methods [5, 9, 13, 18, 21] that have been developed for the solution of product-form queuing networks. However, many interesting and significant system characteristics cannot be modeled by product-form networks. -

Queueing Theory and Process Flow Performance
QUEUEING THEORY AND PROCESS FLOW PERFORMANCE Chang-Sun Chin1 ABSTRACT Queuing delay occurs when a number of entities arrive for services at a work station where a server(s) has limited capacity so that the entities must wait until the server becomes available. We see this phenomenon in the physical production environment as well as in the office environment (e.g., document processing). The obvious solution may be to increase the number of servers to increase capacity of the work station, but other options can attain the same level of performance improvement. The study selects two different projects, investigates their submittal review/approval process and uses queuing theory to determine the major causes of long lead times. Queuing theory provides good categorical indices—variation factor, utilization factor and process time factor—for diagnosing the degree of performance degradation from queuing. By measuring the magnitude of these factors and adjusting their levels using various strategies, we can improve system performance. The study also explains what makes the submittal process of two projects perform differently and suggests options for improving performance in the context of queuing theory. KEY WORDS Process time, queueing theory, submittal, variation, utilization INTRODUCTION Part of becoming lean is eliminating all waste (or muda in Japanese). Waste is “any activity which consumes resources but creates no value” (Womack and Jones 2003). Waiting, one of seven wastes defined by Ohno of Toyota (Ohno 1988), can be seen from two different views: “work waiting” or “worker waiting.” “Work waiting” occurs when servers (people or equipment) at work stations are not available when entities (jobs, materials, etc) arrive at the work stations, that is, when the servers are busy and entities wait in queue. -

Product-Form in Queueing Networks
Product-form in queueing networks VRIJE UNIVERSITEIT Product-form in queueing networks ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Vrije Universiteit te Amsterdam, op gezag van de rector magnificus dr. C. Datema, hoogleraar aan de faculteit der letteren, in het openbaar te verdedigen ten overstaan van de promotiecommissie van de faculteit der economische wetenschappen en econometrie op donderdag 21 mei 1992 te 15.30 uur in het hoofdgebouw van de universiteit, De Boelelaan 1105 door Richardus Johannes Boucherie geboren te Oost- en West-Souburg Thesis Publishers Amsterdam 1992 Promotoren: prof.dr. N.M. van Dijk prof.dr. H.C. Tijms Referenten: prof.dr. A. Hordijk prof.dr. P. Whittle Preface This monograph studies product-form distributions for queueing networks. The celebrated product-form distribution is a closed-form expression, that is an analytical formula, for the queue-length distribution at the stations of a queueing network. Based on this product-form distribution various so- lution techniques for queueing networks can be derived. For example, ag- gregation and decomposition results for product-form queueing networks yield Norton's theorem for queueing networks, and the arrival theorem implies the validity of mean value analysis for product-form queueing net- works. This monograph aims to characterize the class of queueing net- works that possess a product-form queue-length distribution. To this end, the transient behaviour of the queue-length distribution is discussed in Chapters 3 and 4, then in Chapters 5, 6 and 7 the equilibrium behaviour of the queue-length distribution is studied under the assumption that in each transition a single customer is allowed to route among the stations only, and finally, in Chapters 8, 9 and 10 the assumption that a single cus- tomer is allowed to route in a transition only is relaxed to allow customers to route in batches. -

Lecture 5/6 Queueing
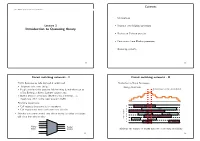
6.263/16.37: Lectures 5 & 6 Introduction to Queueing Theory Eytan Modiano Massachusetts Institute of Technology Eytan Modiano Slide 1 Packet Switched Networks Messages broken into Packets that are routed To their destination PS PS PS Packet Network PS PS PS Buffer Packet PS Switch Eytan Modiano Slide 2 Queueing Systems • Used for analyzing network performance • In packet networks, events are random – Random packet arrivals – Random packet lengths • While at the physical layer we were concerned with bit-error-rate, at the network layer we care about delays – How long does a packet spend waiting in buffers ? – How large are the buffers ? • In circuit switched networks want to know call blocking probability – How many circuits do we need to limit the blocking probability? Eytan Modiano Slide 3 Random events • Arrival process – Packets arrive according to a random process – Typically the arrival process is modeled as Poisson • The Poisson process – Arrival rate of λ packets per second – Over a small interval δ, P(exactly one arrival) = λδ + ο(δ) P(0 arrivals) = 1 - λδ + ο(δ) P(more than one arrival) = 0(δ) Where 0(δ)/ δ −> 0 as δ −> 0. – It can be shown that: (!T)n e"!T P(n arrivals in interval T)= n! Eytan Modiano Slide 4 The Poisson Process (!T)n e"!T P(n arrivals in interval T)= n! n = number of arrivals in T It can be shown that, E[n] = !T E[n2 ] = !T + (!T)2 " 2 = E[(n-E[n])2 ] = E[n2 ] - E[n]2 = !T Eytan Modiano Slide 5 Inter-arrival times • Time that elapses between arrivals (IA) P(IA <= t) = 1 - P(IA > t) = 1 - P(0 arrivals in time -

Steady-State Analysis of Reflected Brownian Motions: Characterization, Numerical Methods and Queueing Applications
STEADY-STATE ANALYSIS OF REFLECTED BROWNIAN MOTIONS: CHARACTERIZATION, NUMERICAL METHODS AND QUEUEING APPLICATIONS a dissertation submitted to the department of mathematics and the committee on graduate studies of stanford university in partial fulfillment of the requirements for the degree of doctor of philosophy By Jiangang Dai July 1990 c Copyright 2000 by Jiangang Dai All Rights Reserved ii I certify that I have read this dissertation and that in my opinion it is fully adequate, in scope and in quality, as a dissertation for the degree of Doctor of Philosophy. J. Michael Harrison (Graduate School of Business) (Principal Adviser) I certify that I have read this dissertation and that in my opinion it is fully adequate, in scope and in quality, as a dissertation for the degree of Doctor of Philosophy. Joseph Keller I certify that I have read this dissertation and that in my opinion it is fully adequate, in scope and in quality, as a dissertation for the degree of Doctor of Philosophy. David Siegmund (Statistics) Approved for the University Committee on Graduate Studies: Dean of Graduate Studies iii Abstract This dissertation is concerned with multidimensional diffusion processes that arise as ap- proximate models of queueing networks. To be specific, we consider two classes of semi- martingale reflected Brownian motions (SRBM's), each with polyhedral state space. For one class the state space is a two-dimensional rectangle, and for the other class it is the d general d-dimensional non-negative orthant R+. SRBM in a rectangle has been identified as an approximate model of a two-station queue- ing network with finite storage space at each station. -
Introduction to Queueing Theory Review on Poisson Process
Contents ELL 785–Computer Communication Networks Motivations Lecture 3 Discrete-time Markov processes Introduction to Queueing theory Review on Poisson process Continuous-time Markov processes Queueing systems 3-1 3-2 Circuit switching networks - I Circuit switching networks - II Traffic fluctuates as calls initiated & terminated Fluctuation in Trunk Occupancy Telephone calls come and go • Number of busy trunks People activity follow patterns: Mid-morning & mid-afternoon at All trunks busy, new call requests blocked • office, Evening at home, Summer vacation, etc. Outlier Days are extra busy (Mother’s Day, Christmas, ...), • disasters & other events cause surges in traffic Providing resources so Call requests always met is too expensive 1 active • Call requests met most of the time cost-effective 2 active • 3 active Switches concentrate traffic onto shared trunks: blocking of requests 4 active active will occur from time to time 5 active Trunk number Trunk 6 active active 7 active active Many Fewer lines trunks – minimize the number of trunks subject to a blocking probability 3-3 3-4 Packet switching networks - I Packet switching networks - II Statistical multiplexing Fluctuations in Packets in the System Dedicated lines involve not waiting for other users, but lines are • used inefficiently when user traffic is bursty (a) Dedicated lines A1 A2 Shared lines concentrate packets into shared line; packets buffered • (delayed) when line is not immediately available B1 B2 C1 C2 (a) Dedicated lines A1 A2 B1 B2 (b) Shared line A1 C1 B1 A2 B2 C2 C1 C2 A (b) -
Analysis of Packet Queueing in Telecommunication Networks
Analysis of Packet Queueing in Telecommunication Networks Course Notes. (BSc.) Network Engineering, 2nd year Video Server TV Broadcasting Server AN6 Web Server File Storage and App Servers WSN3 R1 AN5 AN7 AN4 User9 WSN1 R2 R3 User8 AN1 User7 User1 R4 User2 AN3 User6 User3 WSN2 AN2 User5 User4 Boris Bellalta and Simon Oechsner 1 . Copyright (C) by Boris Bellalta and Simon Oechsner. All Rights Reserved. Work in progress! Contents 1 Introduction 8 1.1 Motivation . .8 1.2 Recommended Books . .9 I Preliminaries 11 2 Random Phenomena in Packet Networks 12 2.1 Introduction . 12 2.2 Characterizing a random variable . 13 2.2.1 Histogram . 14 2.2.2 Expected Value . 16 2.2.3 Variance . 16 2.2.4 Coefficient of Variation . 17 2.2.5 Moments . 17 2.3 Stochastic Processes with Independent and Dependent Outcomes . 18 2.4 Examples . 19 2.5 Formulation of independent and dependent processes . 23 3 Markov Chains 25 3.1 Introduction and Basic Properties . 25 3.2 Discrete Time Markov Chains: DTMC . 28 3.2.1 Equilibrium Distribution . 28 3.3 Continuous Time Markov Chains . 30 3.3.1 The exponential distribution in CTMCs . 31 3.3.2 Memoryless property of the Exponential Distribution . 33 3.3.3 Equilibrium Distribution . 34 3.4 Examples . 35 3.4.1 Load Balancing in a Farm Server . 35 3.4.2 Performance Analysis of a Video Server . 36 2 CONTENTS 3 II Modeling the Internet 40 4 Delays in Communication Networks 41 4.1 A network of queues . 41 4.2 Types of Delay . -
EUROPEAN CONFERENCE on QUEUEING THEORY 2016 Urtzi Ayesta, Marko Boon, Balakrishna Prabhu, Rhonda Righter, Maaike Verloop
EUROPEAN CONFERENCE ON QUEUEING THEORY 2016 Urtzi Ayesta, Marko Boon, Balakrishna Prabhu, Rhonda Righter, Maaike Verloop To cite this version: Urtzi Ayesta, Marko Boon, Balakrishna Prabhu, Rhonda Righter, Maaike Verloop. EUROPEAN CONFERENCE ON QUEUEING THEORY 2016. Jul 2016, Toulouse, France. 72p, 2016. hal- 01368218 HAL Id: hal-01368218 https://hal.archives-ouvertes.fr/hal-01368218 Submitted on 19 Sep 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. EUROPEAN CONFERENCE ON QUEUEING THEORY 2016 Toulouse July 18 – 20, 2016 Booklet edited by Urtzi Ayesta LAAS-CNRS, France Marko Boon Eindhoven University of Technology, The Netherlands‘ Balakrishna Prabhu LAAS-CNRS, France Rhonda Righter UC Berkeley, USA Maaike Verloop IRIT-CNRS, France 2 Contents 1 Welcome Address 4 2 Organization 5 3 Sponsors 7 4 Program at a Glance 8 5 Plenaries 11 6 Takács Award 13 7 Social Events 15 8 Sessions 16 9 Abstracts 24 10 Author Index 71 3 1 Welcome Address Dear Participant, It is our pleasure to welcome you to the second edition of the European Conference on Queueing Theory (ECQT) to be held from the 18th to the 20th of July 2016 at the engineering school ENSEEIHT in Toulouse. -

Queueing Theory
Queueing theory Agner Krarup Erlang, a Danish engineer who worked for the Copenhagen Telephone Exchange, published the first paper on what would now be called queueing theory in 1909.[8][9][10] He modeled the number of telephone calls arriving at an exchange by a Poisson process and solved the M/D/1 queue in 1917 and M/D/k queueing model in 1920.[11] In Kendall’s notation: • M stands for Markov or memoryless and means ar- rivals occur according to a Poisson process • D stands for deterministic and means jobs arriving at the queue require a fixed amount of service • k describes the number of servers at the queueing node (k = 1, 2,...). If there are more jobs at the node than there are servers then jobs will queue and wait for service Queue networks are systems in which single queues are connected The M/M/1 queue is a simple model where a single server by a routing network. In this image servers are represented by serves jobs that arrive according to a Poisson process and circles, queues by a series of retangles and the routing network have exponentially distributed service requirements. In by arrows. In the study of queue networks one typically tries to an M/G/1 queue the G stands for general and indicates obtain the equilibrium distribution of the network, although in an arbitrary probability distribution. The M/G/1 model many applications the study of the transient state is fundamental. was solved by Felix Pollaczek in 1930,[12] a solution later recast in probabilistic terms by Aleksandr Khinchin and Queueing theory is the mathematical study of waiting now known as the Pollaczek–Khinchine formula.[11] lines, or queues.[1] In queueing theory a model is con- structed so that queue lengths and waiting time can be After World War II queueing theory became an area of [11] predicted.[1] Queueing theory is generally considered a research interest to mathematicians. -

Delay Models in Data Networks
3 Delay Models in Data Networks 3.1 INTRODUCTION One of the most important perfonnance measures of a data network is the average delay required to deliver a packet from origin to destination. Furthennore, delay considerations strongly influence the choice and perfonnance of network algorithms, such as routing and flow control. For these reasons, it is important to understand the nature and mechanism of delay, and the manner in which it depends on the characteristics of the network. Queueing theory is the primary methodological framework for analyzing network delay. Its use often requires simplifying assumptions since, unfortunately, more real- istic assumptions make meaningful analysis extremely difficult. For this reason, it is sometimes impossible to obtain accurate quantitative delay predictions on the basis of queueing models. Nevertheless, these models often provide a basis for adequate delay approximations, as well as valuable qualitative results and worthwhile insights. In what follows, we will mostly focus on packet delay within the communication subnet (i.e., the network layer). This delay is the sum of delays on each subnet link traversed by the packet. Each link delay in tum consists of four components. 149 150 Delay Models in Data Networks Chap. 3 1. The processinR delay between the time the packet is correctly received at the head node of the link and the time the packet is assigned to an outgoing link queue for transmission. (In some systems, we must add to this delay some additional processing time at the DLC and physical layers.) 2. The queueinR delay between the time the packet is assigned to a queue for trans- mission and the time it starts being transmitted. -

Improving Queuing System Throughput Using Distributed Mean Value Analysis to Control Network Congestion
Communications and Network, 2015, 7, 21-29 Published Online February 2015 in SciRes. http://www.scirp.org/journal/cn http://dx.doi.org/10.4236/cn.2015.71003 Improving Queuing System Throughput Using Distributed Mean Value Analysis to Control Network Congestion Faisal Shahzad1, Muhammad Faheem Mushtaq1, Saleem Ullah1*, M. Abubakar Siddique2, Shahzada Khurram1, Najia Saher1 1Department of Computer Science & IT, The Islamia University of Bahawalpur, Bahawalpur, Pakistan 2College of Computer Science, Chongqing University, Chongqing, China Email: [email protected], [email protected], *[email protected], [email protected], [email protected], [email protected] Received 12 June 2014; accepted 30 January 2015; published 2 February 2015 Copyright © 2015 by authors and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/ Abstract In this paper, we have used the distributed mean value analysis (DMVA) technique with the help of random observe property (ROP) and palm probabilities to improve the network queuing system throughput. In such networks, where finding the complete communication path from source to destination, especially when these nodes are not in the same region while sending data between two nodes. So, an algorithm is developed for single and multi-server centers which give more in- teresting and successful results. The network is designed by a closed queuing network model and we will use mean value analysis to determine the network throughput (β) for its different values. For certain chosen values of parameters involved in this model, we found that the maximum net- work throughput for β ≥ 0.7 remains consistent in a single server case, while in multi-server case for β ≥ 0.5 throughput surpass the Marko chain queuing system.