Decomposition of Sohncke Space Groups Into Products of Bieberbach and Symmorphic Parts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glide and Screw
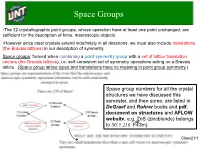
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -
Group Theory Applied to Crystallography
International Union of Crystallography Commission on Mathematical and Theoretical Crystallography Summer School on Mathematical and Theoretical Crystallography 27 April - 2 May 2008, Gargnano, Italy Group theory applied to crystallography Bernd Souvignier Institute for Mathematics, Astrophysics and Particle Physics Radboud University Nijmegen The Netherlands 29 April 2008 2 CONTENTS Contents 1 Introduction 3 2 Elements of space groups 5 2.1 Linearmappings .................................. 5 2.2 Affinemappings................................... 8 2.3 AffinegroupandEuclideangroup . .... 9 2.4 Matrixnotation .................................. 12 3 Analysis of space groups 14 3.1 Lattices ....................................... 14 3.2 Pointgroups..................................... 17 3.3 Transformationtoalatticebasis . ....... 19 3.4 Systemsofnonprimitivetranslations . ......... 22 4 Construction of space groups 25 4.1 Shiftoforigin................................... 25 4.2 Determining systems of nonprimitivetranslations . ............. 27 4.3 Normalizeraction................................ .. 31 5 Space group classification 35 5.1 Spacegrouptypes................................. 35 5.2 Arithmeticclasses............................... ... 36 5.3 Bravaisflocks.................................... 37 5.4 Geometricclasses................................ .. 39 5.5 Latticesystems .................................. 41 5.6 Crystalsystems .................................. 41 5.7 Crystalfamilies ................................. .. 42 6 Site-symmetry -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

COXETER GROUPS (Unfinished and Comments Are Welcome)
COXETER GROUPS (Unfinished and comments are welcome) Gert Heckman Radboud University Nijmegen [email protected] October 10, 2018 1 2 Contents Preface 4 1 Regular Polytopes 7 1.1 ConvexSets............................ 7 1.2 Examples of Regular Polytopes . 12 1.3 Classification of Regular Polytopes . 16 2 Finite Reflection Groups 21 2.1 NormalizedRootSystems . 21 2.2 The Dihedral Normalized Root System . 24 2.3 TheBasisofSimpleRoots. 25 2.4 The Classification of Elliptic Coxeter Diagrams . 27 2.5 TheCoxeterElement. 35 2.6 A Dihedral Subgroup of W ................... 39 2.7 IntegralRootSystems . 42 2.8 The Poincar´eDodecahedral Space . 46 3 Invariant Theory for Reflection Groups 53 3.1 Polynomial Invariant Theory . 53 3.2 TheChevalleyTheorem . 56 3.3 Exponential Invariant Theory . 60 4 Coxeter Groups 65 4.1 Generators and Relations . 65 4.2 TheTitsTheorem ........................ 69 4.3 The Dual Geometric Representation . 74 4.4 The Classification of Some Coxeter Diagrams . 77 4.5 AffineReflectionGroups. 86 4.6 Crystallography. .. .. .. .. .. .. .. 92 5 Hyperbolic Reflection Groups 97 5.1 HyperbolicSpace......................... 97 5.2 Hyperbolic Coxeter Groups . 100 5.3 Examples of Hyperbolic Coxeter Diagrams . 108 5.4 Hyperbolic reflection groups . 114 5.5 Lorentzian Lattices . 116 3 6 The Leech Lattice 125 6.1 ModularForms ..........................125 6.2 ATheoremofVenkov . 129 6.3 The Classification of Niemeier Lattices . 132 6.4 The Existence of the Leech Lattice . 133 6.5 ATheoremofConway . 135 6.6 TheCoveringRadiusofΛ . 137 6.7 Uniqueness of the Leech Lattice . 140 4 Preface Finite reflection groups are a central subject in mathematics with a long and rich history. The group of symmetries of a regular m-gon in the plane, that is the convex hull in the complex plane of the mth roots of unity, is the dihedral group of order 2m, which is the simplest example of a reflection Dm group. -

Symmetry in Reciprocal Space
Symmetry in Reciprocal Space The diffraction pattern is always centrosymmetric (at least in good approximation). Friedel’s law: Ihkl = I-h-k-l. Fourfold symmetry in the diffraction pattern corresponds to a fourfold axis in the space group (4, 4, 41, 42 or 43), threefold to a threefold, etc. If you take away the translational part of the space group symmetry and add an inversion center, you end up with the Laue group. The Laue group describes the symmetry of the diffraction pattern. The Laue symmetry can be lower than the metric symmetry of the unit cell, but never higher. That means: A monoclinic crystal with β = 90° is still monoclinic. The diffraction pattern from such a crystal will have monoclinic symmetry, even though the metric symmetry of the unit cell looks orthorhombic. There are 11 Laue groups: -1, 2/m, mmm, 4/m, 4/mmm, -3, -3/m, 6/m, 6/mmm, m3, m3m Laue Symmetry Crystal System Laue Group Point Group Triclinic -1 1, -1 Monoclinic 2/m 2, m, 2/m Orthorhombic mmm 222, mm2, mmm 4/m 4, -4, 4/m Tetragonal 4/mmm 422, 4mm, -42m, 4/mmm -3 3, -3 Trigonal/ Rhombohedral -3/m 32, 3m, -3m 6/m 6, -6, 6/m Hexagonal 6/mmm 622, 6mm, -6m2, 6/mmm m3 23, m3 Cubic m3m 432, -43m, m3m Space Group Determination The first step in the determination of a crystal structure is the determination of the unit cell from the diffraction pattern. Second step: Space group determination. From the symmetry of the diffraction pattern, we can determine the Laue group, which narrows down the choice quite considerably. -

Group Theory 1 – Basic Principles
Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Group Theory 1 – Basic Principles Group Theory 2 & 3 – Group Theory in Crystallography TUTORIAL: Apply Crystallographic Group Theory to a Phase Transition Group Theory 4 – Applications in Crystallography and Solid State Chemistry Prof. Dr. Holger Kohlmann Inorganic Chemistry – Functional Materials University Leipzig, Germany [email protected] ©Holger Kohlmann, Leipzig University 1 Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Group Theory 1 – Basic principles 1.1 Basic notions, group axioms and examples of groups 1.2 Classification of the group elements and subgroups Group Theory 2 & 3 – Group theory in crystallography 2 From point groups to space groups – a brief introduction to crystallography 3.1 Crystallographic group-subgroup relationships 3.2 Examples of phase transitions in chemistry TUTORIAL: Apply crystallographic group theory to a phase transition Group Theory 4 – Applications in crystallography and solid state chemistry 4.1 The relation between crystal structures and family trees 4.2 Complex cases of phase transitions and topotactic reactions ©Holger Kohlmann, Leipzig University 2 Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Ressources • T. Hahn, H. Wondratschek, Symmetry of Crystals, Heron Press, Sofia, Bulgaria, 1994 • International Tables for Crystallography, Vol. -

Crystallography: Symmetry Groups and Group Representations B
EPJ Web of Conferences 22, 00006 (2012) DOI: 10.1051/epjconf/20122200006 C Owned by the authors, published by EDP Sciences, 2012 Crystallography: Symmetry groups and group representations B. Grenier1 and R. Ballou2 1SPSMS, UMR-E 9001, CEA-INAC / UJF-Grenoble, MDN, 38054 Grenoble, France 2Institut Néel, CNRS / UJF, 25 rue des Martyrs, BP. 166, 38042 Grenoble Cedex 9, France Abstract. This lecture is aimed at giving a sufficient background on crystallography, as a reminder to ease the reading of the forthcoming chapters. It more precisely recalls the crystallographic restrictions on the space isometries, enumerates the point groups and the crystal lattices consistent with these, examines the structure of the space group, which gathers all the spatial invariances of a crystal, and describes a few dual notions. It next attempts to familiarize us with the representation analysis of physical states and excitations of crystals. 1. INTRODUCTION Crystallography covers a wide spectrum of investigations: i- it aspires to get an insight into crystallization phenomena and develops methods of crystal growths, which generally pertains to the physics of non linear irreversible processes; ii- it geometrically describes the natural shapes and the internal structures of the crystals, which is carried out most conveniently by borrowing mathematical tools from group theory; iii- it investigates the crystallized matter at the atomic scale by means of diffraction techniques using X-rays, electrons or neutrons, which are interpreted in the dual context of the reciprocal space and transposition therein of the crystal symmetries; iv- it analyzes the imperfections of the crystals, often directly visualized in scanning electron, tunneling or force microscopies, which in some instances find a meaning by handling unfamiliar concepts from homotopy theory; v- it aims at providing means for discerning the influences of the crystal structure on the physical properties of the materials, which requires to make use of mathematical methods from representation theory. -

Structure and Symmetry of Cus, (Pyrite Structure)
American Mineralogist, Volume 64, pages 1265-1271, 1979 Structure and symmetryof CuS, (pyrite structure) Husnnt E. KING, JR.' eNo Cnenres T. PREWITT Departmentof Earth and SpaceSciences State Universityof New York StonyBrook, New York 11794 Abstract X-ray diffraction data collectedon a single-crystalspecimen of CuS2show that despiteits optical anisotropyCuS, apparentlyhas the cubic pyrite structure,with a: 5.7891(6)A.pre- cessionand Weissenbergphotographs fail to reveal any reflections which violate the require- ments for space group Pa3. Such reflections, however, Wereobserved in four-circle di-ffrac- tometer measurements,but they are shown to result from multiple di-ffraction,effects. Reflement of the structurein spacegroup Pa3 using 209 intensity data givesa weightedre- sidual of 0.014and x(S) : 0.39878(5).A comparisonof the refined structurewith other pyrite structuressuggests that copper in CuSz has a formal valenceof 2+ and three antibonding electrons.Also, the CuSeoctahedron is only slightly distorted,which is in contrastwith the square-planarcoordination usually found for Cu2*. Introduction spect to the X-ray diffraction studies on FeS'. Fin- Disulfides of the transition elementsMn through klea et al. (1976) found no deviations from cubic Zn crystalllz,ein the pyrite structure. The Mn, Fe, symmetry,but Bayliss (1977)concluded that at least Co, and Ni membersof this group occur as minerals, sone pyrite crystalsare triclinic. Becauseoptical ani- and their structures have been refined. CuS, and sotropy has always been observedfor CuS, we de- ZnS.' are not found in nature, but they have been cided to investigate its crystal structure to provide synthesizedat high temperaturesand pressures.This further information on this intriguing problem. -

2.3 Band Structure and Lattice Symmetries: Example of Diamond
2.2.9 Product of representaitons Besides the sums of representations, one can also define their products. Consider two groups G and H and their direct product G × H. If we have two representations D1 and D2 of G and H respectively, we may define their product as D(g · h) = D1(g) ⊗ D2(h) ; (1) where ⊗ is the tensor product of matrices: (A ⊗ B)ij;kl = AikBjl. The dimension of such a representation equals the product of the dimensions of D1 and D2, and its character is given by the product of the two characters. Note that if both D1 and D2 are irreducible, then their product is also irreducible (as a representation of G × H). In other words, if a group is a direct product of two groups, then its table of irreducible representations can be obtained as the product of the tables of irreducible representations of its factors. One can also encounter a situation, where the two groups G and H are equal, and their product is also viewed as a representation of the same group: D(g) = D1(g) ⊗ D2(g) : (2) In this case, the product of two irreducible representations is not generally irreducible. For example, the product of two spin-1/2 representations of the rotation group is decomposed into a singlet and a triplet (which can be symbolically written as 2⊗2 = 1⊕3, if we mean by 1, 2, and 3 irreducible representations of SU(2) with the corresponding dimensions). 2.3 Band structure and lattice symmetries: example of diamond We now apply the general formalism developed in the last lecture to the example of the crystal structure of diamond. -

Part 1: Supplementary Material Lectures 1-4
Crystal Structure and Dynamics Paolo G. Radaelli, Michaelmas Term 2013 Part 1: Supplementary Material Lectures 1-4 Web Site: http://www2.physics.ox.ac.uk/students/course-materials/c3-condensed-matter-major-option Contents 1 Frieze patterns and frieze groups 2 2 Symbols for frieze groups 3 2.1 A few new concepts from frieze groups . .4 2.2 Frieze groups in the ITC . .6 3 Wallpaper groups 8 3.1 A few new concepts for Wallpaper Groups . .8 3.2 Lattices and the “translation set” . .8 3.3 Bravais lattices in 2D . .9 3.3.1 Oblique system . .9 3.3.2 Rectangular system . .9 3.3.3 Square system . 10 3.3.4 Hexagonal system . 10 3.4 Primitive, asymmetric and conventional Unit cells in 2D . 10 3.5 The 17 wallpaper groups . 10 3.6 Analyzing wallpaper and other 2D art using wallpaper groups . 10 1 4 Point groups in 3D 12 4.1 The new generalized (proper & improper) rotations in 3D . 13 4.2 The 3D point groups with a 2D projection . 13 4.3 The other 3D point groups: the 5 cubic groups . 15 5 The 14 Bravais lattices in 3D 17 6 Notation for 3D point groups 19 6.0.1 Notation for ”projective” 3D point groups . 19 7 Glide planes in 3D 21 8 “Real” crystal structures 21 8.1 Cohesive forces in crystals — atomic radii . 21 8.2 Close-packed structures . 22 8.3 Packing spheres of different radii . 23 8.4 Framework structures . 24 8.5 Layered structures . 25 8.6 Molecular structures . -

Symmetry-Operations, Point Groups, Space Groups and Crystal Structure
1 Symmetry-operations, point groups, space groups and crystal structure KJ/MV 210 Helmer Fjellvåg, Department of Chemistry, University of Oslo 1994 This compendium replaces chapter 5.3 and 6 in West. Sections not part of the curriculum are enclosed in asterisks (*). It is recommended that the textbooks of West and Jastrzebski are used as supplementary reading material, with special emphasis on illustrative examples. In this compendium illustrative examples (in italics) have been chosen from close packed structures. A few symbols and synonyms are given in Norwegian as information. The compendium contains exercises which will not be explained in the classes. It is recommended to work through the exercises while reading this compendium. Introduction. Condensed phases may be liquids as well as solids. There are fundamental differences between liquids and solids regarding the long-range distribution of atoms. While liquids have long range disorder in a large scale, solids are mainly ordered, i.e. there is regularity in the repetition of structural fragments (atoms and/or groups of atoms) in the 3 dimensional material. Surfaces of solid materials are often somewhat differently organized than the “bulk” (i.e. the inner part of the material). The atomic (structural) arrangement near the surface will often be different from the bulk arrangement due to surface reconstruction in order to minimize the energy loss associated with complete chemical bonding in all actual directions. Liquids are disordered in bulk, but they often have an ordered surface structure. Solids do not need to display systematic long-range order, i.e. to be crystalline. Some phases can be prepared as amorphous materials, e.g. -
Crystallographic Point Groups and Space Groups Physics 251 Spring 2011
Crystallographic Point Groups and Space Groups Physics 251 Spring 2011 Matt Wittmann University of California Santa Cruz June 8, 2011 Mathematical description of a crystal Definition A Bravais lattice is an infinite array of points generated by integer combinations of 3 independent primitive vectors: fn1a1 + n2a2 + n3a3 j n1; n2; n3 2 Zg: Crystal structures are described by attaching a basis consisting of one or more atoms to each lattice point. Symmetries of a crystalline solid By definition a crystal is invariant under translation by a lattice vector R = n1a1 + n2a2 + n3a3 n1; n2; n3 2 Z: In general there will be other symmetries, such as rotation, which leave one point fixed. These form the point group of the crystal. The group of all symmetry operations is called the space group of the crystal. φ a2 a φ 2 a1 a1 |a 1| ≠ |a2 |, φ ≠ 90° |a1 | = |a2 |, φ = 120° Figure: Oblique and hexagonal lattices Isometries and the Euclidean group Definition An isometry is a distance-preserving map. The isometries mapping n R to itself form a group under function composition, called the Euclidean group En. Theorem n The group of translations Tn = fx ! x + a j a 2 R g is an invariant subgroup of En ∼ En=Tn = O(n) ∼ En = Tn o O(n) Every element of En can be uniquely written as the product of a translation and a rotation or reflection. Point and space groups: formal definition Definition A space group in n dimensions is a subgroup of En. Definition The point group of a given space group is the subgroup of symmetry operations that leave one point fixed (i.e.