5. Crystallography Let En Denote N-Dimensional Euclidean Space
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glide and Screw
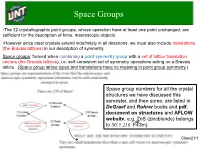
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -

Projective Geometry: a Short Introduction
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Master MOSIG Introduction to Projective Geometry Contents 1 Introduction 2 1.1 Objective . .2 1.2 Historical Background . .3 1.3 Bibliography . .4 2 Projective Spaces 5 2.1 Definitions . .5 2.2 Properties . .8 2.3 The hyperplane at infinity . 12 3 The projective line 13 3.1 Introduction . 13 3.2 Projective transformation of P1 ................... 14 3.3 The cross-ratio . 14 4 The projective plane 17 4.1 Points and lines . 17 4.2 Line at infinity . 18 4.3 Homographies . 19 4.4 Conics . 20 4.5 Affine transformations . 22 4.6 Euclidean transformations . 22 4.7 Particular transformations . 24 4.8 Transformation hierarchy . 25 Grenoble Universities 1 Master MOSIG Introduction to Projective Geometry Chapter 1 Introduction 1.1 Objective The objective of this course is to give basic notions and intuitions on projective geometry. The interest of projective geometry arises in several visual comput- ing domains, in particular computer vision modelling and computer graphics. It provides a mathematical formalism to describe the geometry of cameras and the associated transformations, hence enabling the design of computational ap- proaches that manipulates 2D projections of 3D objects. In that respect, a fundamental aspect is the fact that objects at infinity can be represented and manipulated with projective geometry and this in contrast to the Euclidean geometry. This allows perspective deformations to be represented as projective transformations. Figure 1.1: Example of perspective deformation or 2D projective transforma- tion. Another argument is that Euclidean geometry is sometimes difficult to use in algorithms, with particular cases arising from non-generic situations (e.g. -
Lecture 12: Camera Projection
Robert Collins CSE486, Penn State Lecture 12: Camera Projection Reading: T&V Section 2.4 Robert Collins CSE486, Penn State Imaging Geometry W Object of Interest in World Coordinate System (U,V,W) V U Robert Collins CSE486, Penn State Imaging Geometry Camera Coordinate Y System (X,Y,Z). Z X • Z is optic axis f • Image plane located f units out along optic axis • f is called focal length Robert Collins CSE486, Penn State Imaging Geometry W Y y X Z x V U Forward Projection onto image plane. 3D (X,Y,Z) projected to 2D (x,y) Robert Collins CSE486, Penn State Imaging Geometry W Y y X Z x V u U v Our image gets digitized into pixel coordinates (u,v) Robert Collins CSE486, Penn State Imaging Geometry Camera Image (film) World Coordinates Coordinates CoordinatesW Y y X Z x V u U v Pixel Coordinates Robert Collins CSE486, Penn State Forward Projection World Camera Film Pixel Coords Coords Coords Coords U X x u V Y y v W Z We want a mathematical model to describe how 3D World points get projected into 2D Pixel coordinates. Our goal: describe this sequence of transformations by a big matrix equation! Robert Collins CSE486, Penn State Backward Projection World Camera Film Pixel Coords Coords Coords Coords U X x u V Y y v W Z Note, much of vision concerns trying to derive backward projection equations to recover 3D scene structure from images (via stereo or motion) But first, we have to understand forward projection… Robert Collins CSE486, Penn State Forward Projection World Camera Film Pixel Coords Coords Coords Coords U X x u V Y y v W Z 3D-to-2D Projection • perspective projection We will start here in the middle, since we’ve already talked about this when discussing stereo. -
Group Theory Applied to Crystallography
International Union of Crystallography Commission on Mathematical and Theoretical Crystallography Summer School on Mathematical and Theoretical Crystallography 27 April - 2 May 2008, Gargnano, Italy Group theory applied to crystallography Bernd Souvignier Institute for Mathematics, Astrophysics and Particle Physics Radboud University Nijmegen The Netherlands 29 April 2008 2 CONTENTS Contents 1 Introduction 3 2 Elements of space groups 5 2.1 Linearmappings .................................. 5 2.2 Affinemappings................................... 8 2.3 AffinegroupandEuclideangroup . .... 9 2.4 Matrixnotation .................................. 12 3 Analysis of space groups 14 3.1 Lattices ....................................... 14 3.2 Pointgroups..................................... 17 3.3 Transformationtoalatticebasis . ....... 19 3.4 Systemsofnonprimitivetranslations . ......... 22 4 Construction of space groups 25 4.1 Shiftoforigin................................... 25 4.2 Determining systems of nonprimitivetranslations . ............. 27 4.3 Normalizeraction................................ .. 31 5 Space group classification 35 5.1 Spacegrouptypes................................. 35 5.2 Arithmeticclasses............................... ... 36 5.3 Bravaisflocks.................................... 37 5.4 Geometricclasses................................ .. 39 5.5 Latticesystems .................................. 41 5.6 Crystalsystems .................................. 41 5.7 Crystalfamilies ................................. .. 42 6 Site-symmetry -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

Point Sets up to Rigid Transformations Are Determined by the Distribution of Their Pairwise Distances
Point Sets Up to Rigid Transformations are Determined by the Distribution of their Pairwise Distances Daniel Chen December 6, 2008 Abstract This report is a summary of [BK06], which gives a simpler, albeit less general proof for the result of [BK04]. 1 Introduction [BK04] and [BK06] study the circumstances when sets of n-points in Euclidean space are determined up to rigid transformations by the distribution of unlabeled pairwise distances. In fact, they show the rather surprising result that any set of n-points in general position are determined up to rigid transformations by the distribution of unlabeled distances. 1.1 Practical Motivation The results of [BK04] and [BK06] are partly motivated by experimental results in [OFCD]. [OFCD] is an experimental study evaluating the use of shape distri- butions to classify 3D objects represented by point clouds. A shape distribution is a the distribution of a function on a randomly selected set of points from the point cloud. [OFCD] tested various such functions, including the angle be- tween three random points on the surface, the distance between the centroid and a random point, the distance between two random points, the square root of the area of the triangle between three random points, and the cube root of the volume of the tetrahedron between four random points. Then, the distri- butions are compared using dissimilarity measures, including χ2, Battacharyya, and Minkowski LN norms for both the pdf and cdf for N = 1; 2; 1. The experimental results showed that the shape distribution function that worked best for classification was the distance between two random points and the best dissimilarity measure was the pdf L1 norm. -

Draft Framework for a Teaching Unit: Transformations
Co-funded by the European Union PRIMARY TEACHER EDUCATION (PrimTEd) PROJECT GEOMETRY AND MEASUREMENT WORKING GROUP DRAFT FRAMEWORK FOR A TEACHING UNIT Preamble The general aim of this teaching unit is to empower pre-service students by exposing them to geometry and measurement, and the relevant pe dagogical content that would allow them to become skilful and competent mathematics teachers. The depth and scope of the content often go beyond what is required by prescribed school curricula for the Intermediate Phase learners, but should allow pre- service teachers to be well equipped, and approach the teaching of Geometry and Measurement with confidence. Pre-service teachers should essentially be prepared for Intermediate Phase teaching according to the requirements set out in MRTEQ (Minimum Requirements for Teacher Education Qualifications, 2019). “MRTEQ provides a basis for the construction of core curricula Initial Teacher Education (ITE) as well as for Continuing Professional Development (CPD) Programmes that accredited institutions must use in order to develop programmes leading to teacher education qualifications.” [p6]. Competent learning… a mixture of Theoretical & Pure & Extrinsic & Potential & Competent learning represents the acquisition, integration & application of different types of knowledge. Each type implies the mastering of specific related skills Disciplinary Subject matter knowledge & specific specialized subject Pedagogical Knowledge of learners, learning, curriculum & general instructional & assessment strategies & specialized Learning in & from practice – the study of practice using Practical learning case studies, videos & lesson observations to theorize practice & form basis for learning in practice – authentic & simulated classroom environments, i.e. Work-integrated Fundamental Learning to converse in a second official language (LOTL), ability to use ICT & acquisition of academic literacies Knowledge of varied learning situations, contexts & Situational environments of education – classrooms, schools, communities, etc. -

COXETER GROUPS (Unfinished and Comments Are Welcome)
COXETER GROUPS (Unfinished and comments are welcome) Gert Heckman Radboud University Nijmegen [email protected] October 10, 2018 1 2 Contents Preface 4 1 Regular Polytopes 7 1.1 ConvexSets............................ 7 1.2 Examples of Regular Polytopes . 12 1.3 Classification of Regular Polytopes . 16 2 Finite Reflection Groups 21 2.1 NormalizedRootSystems . 21 2.2 The Dihedral Normalized Root System . 24 2.3 TheBasisofSimpleRoots. 25 2.4 The Classification of Elliptic Coxeter Diagrams . 27 2.5 TheCoxeterElement. 35 2.6 A Dihedral Subgroup of W ................... 39 2.7 IntegralRootSystems . 42 2.8 The Poincar´eDodecahedral Space . 46 3 Invariant Theory for Reflection Groups 53 3.1 Polynomial Invariant Theory . 53 3.2 TheChevalleyTheorem . 56 3.3 Exponential Invariant Theory . 60 4 Coxeter Groups 65 4.1 Generators and Relations . 65 4.2 TheTitsTheorem ........................ 69 4.3 The Dual Geometric Representation . 74 4.4 The Classification of Some Coxeter Diagrams . 77 4.5 AffineReflectionGroups. 86 4.6 Crystallography. .. .. .. .. .. .. .. 92 5 Hyperbolic Reflection Groups 97 5.1 HyperbolicSpace......................... 97 5.2 Hyperbolic Coxeter Groups . 100 5.3 Examples of Hyperbolic Coxeter Diagrams . 108 5.4 Hyperbolic reflection groups . 114 5.5 Lorentzian Lattices . 116 3 6 The Leech Lattice 125 6.1 ModularForms ..........................125 6.2 ATheoremofVenkov . 129 6.3 The Classification of Niemeier Lattices . 132 6.4 The Existence of the Leech Lattice . 133 6.5 ATheoremofConway . 135 6.6 TheCoveringRadiusofΛ . 137 6.7 Uniqueness of the Leech Lattice . 140 4 Preface Finite reflection groups are a central subject in mathematics with a long and rich history. The group of symmetries of a regular m-gon in the plane, that is the convex hull in the complex plane of the mth roots of unity, is the dihedral group of order 2m, which is the simplest example of a reflection Dm group. -

Half-Turns and Line Symmetric Motions
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by LSBU Research Open Half-turns and Line Symmetric Motions J.M. Selig Faculty of Business, Computing and Info. Management, London South Bank University, London SE1 0AA, U.K. (e-mail: [email protected]) and M. Husty Institute of Basic Sciences in Engineering Unit Geometry and CAD, Leopold-Franzens-Universit¨at Innsbruck, Austria. (e-mail: [email protected]) Abstract A line symmetric motion is the motion obtained by reflecting a rigid body in the successive generator lines of a ruled surface. In this work we review the dual quaternion approach to rigid body displacements, in particular the representation of the group SE(3) by the Study quadric. Then some classical work on reflections in lines or half-turns is reviewed. Next two new characterisations of line symmetric motions are presented. These are used to study a number of examples one of which is a novel line symmetric motion given by a rational degree five curve in the Study quadric. The rest of the paper investigates the connection between sets of half-turns and linear subspaces of the Study quadric. Line symmetric motions produced by some degenerate ruled surfaces are shown to be restricted to certain 2-planes in the Study quadric. Reflections in the lines of a linear line complex lie in the intersection of a the Study-quadric with a 4-plane. 1 Introduction In this work we revisit the classical idea of half-turns using modern mathematical techniques. In particular we use the dual quaternion representation of rigid-body motions. -

Symmetry in Reciprocal Space
Symmetry in Reciprocal Space The diffraction pattern is always centrosymmetric (at least in good approximation). Friedel’s law: Ihkl = I-h-k-l. Fourfold symmetry in the diffraction pattern corresponds to a fourfold axis in the space group (4, 4, 41, 42 or 43), threefold to a threefold, etc. If you take away the translational part of the space group symmetry and add an inversion center, you end up with the Laue group. The Laue group describes the symmetry of the diffraction pattern. The Laue symmetry can be lower than the metric symmetry of the unit cell, but never higher. That means: A monoclinic crystal with β = 90° is still monoclinic. The diffraction pattern from such a crystal will have monoclinic symmetry, even though the metric symmetry of the unit cell looks orthorhombic. There are 11 Laue groups: -1, 2/m, mmm, 4/m, 4/mmm, -3, -3/m, 6/m, 6/mmm, m3, m3m Laue Symmetry Crystal System Laue Group Point Group Triclinic -1 1, -1 Monoclinic 2/m 2, m, 2/m Orthorhombic mmm 222, mm2, mmm 4/m 4, -4, 4/m Tetragonal 4/mmm 422, 4mm, -42m, 4/mmm -3 3, -3 Trigonal/ Rhombohedral -3/m 32, 3m, -3m 6/m 6, -6, 6/m Hexagonal 6/mmm 622, 6mm, -6m2, 6/mmm m3 23, m3 Cubic m3m 432, -43m, m3m Space Group Determination The first step in the determination of a crystal structure is the determination of the unit cell from the diffraction pattern. Second step: Space group determination. From the symmetry of the diffraction pattern, we can determine the Laue group, which narrows down the choice quite considerably. -
Rigid Transformations
Mathematical Principles in Vision and Graphics: Rigid Transformations Ass.Prof. Friedrich Fraundorfer SS 2018 Learning goals . Understand the problems of dealing with rotations . Understand how to represent rotations . Understand the terms SO(3) etc. Understand the use of the tangent space . Understand Euler angles, Axis-Angle, and quaternions . Understand how to interpolate, filter and optimize rotations 2 Outline . Rigid transformations . Problems with rotation matrices . Properties of rotation matrices . Matrix groups SO(3), SE(3) . Manifolds . Tangent space . Skew-symmetric matrices . Exponential map . Euler angles, angle-axis, quaternions . Interpolation . Filtering . Optimization 3 Motivation: 3D Viewer Rigid transformations 푧 푝 푋퐶 푍 푋푤 푥 퐶 푦 푂 푊 푇 푅 푂 푌 푥 ∈ ℝ푛 푋 푋푐 = 푅푋푤 + 푇 T ∈ ℝ푛 . Coordinates are related by: 푋푐 푅 푇 푋푤 = 푛×푛 1 0 1 1 푅 ∈ ℝ . Rigid transformation belong to the matrix group SE(3) . What does this mean? 5 Properties of rotation matrices Rotation matrix: 푧 푍 3×3 푅 = 푟1, 푟2, 푟3 ∈ ℝ 푟3 푦 푟2 푇 푅 푅 = 퐼, det 푅 = +1 푂 푌 푟1 푋 푥 Coordinates are related by: 푋푐 = 푅푋푤 . Rotation matrices belong to the matrix group SO(3) . What does this mean? 6 Problems with rotation matrices . Optimization of rotations (bundle adjustment) 푓(푥푛) ▫ Newton’s method 푥푛+1 = 푥푛 − 푓′(푥푛) . Linear interpolation . Filtering and averaging ▫ E.g. averaging rotation from IMU or camera pose tracker for AR/VR glasses 7 Matrix groups . The set of all the nxn invertible matrices is a group w.r.t. the matrix multiplication: 퐺퐿(푛) = 푀 ∈ ℝ푛×푛|det(푀) ≠ 0 ,× General linear group . -

Group Theory 1 – Basic Principles
Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Group Theory 1 – Basic Principles Group Theory 2 & 3 – Group Theory in Crystallography TUTORIAL: Apply Crystallographic Group Theory to a Phase Transition Group Theory 4 – Applications in Crystallography and Solid State Chemistry Prof. Dr. Holger Kohlmann Inorganic Chemistry – Functional Materials University Leipzig, Germany [email protected] ©Holger Kohlmann, Leipzig University 1 Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Group Theory 1 – Basic principles 1.1 Basic notions, group axioms and examples of groups 1.2 Classification of the group elements and subgroups Group Theory 2 & 3 – Group theory in crystallography 2 From point groups to space groups – a brief introduction to crystallography 3.1 Crystallographic group-subgroup relationships 3.2 Examples of phase transitions in chemistry TUTORIAL: Apply crystallographic group theory to a phase transition Group Theory 4 – Applications in crystallography and solid state chemistry 4.1 The relation between crystal structures and family trees 4.2 Complex cases of phase transitions and topotactic reactions ©Holger Kohlmann, Leipzig University 2 Topological and Symmetry-Broken Phases in Physics and Chemistry – International Theoretical Basics and Phenomena Ranging from Crystals and Molecules Summer School to Majorana Fermions, Neutrinos and Cosmic Phase Transitions 2017 Ressources • T. Hahn, H. Wondratschek, Symmetry of Crystals, Heron Press, Sofia, Bulgaria, 1994 • International Tables for Crystallography, Vol.