Heavy Truck ESC Effectiveness Study Using NADS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spinner Drive Owners Manual
Spinner Drive Owners Manual Spinner Drive Owner's Manual 0996256_D © 2015 Valmont Industries, Inc., Valley, NE 68064 USA. All rights reserved. www.valleyirrigation.com 2 Spinner Drive TABLE OF CONTENTS SPINNER DRIVE OWNERS MANUAL .............................................................................................................. 1 TABLE OF CONTENTS ..................................................................................................................................... 3 SERIES SPAN IDENTIFICATION ...................................................................................................................... 5 EC DECLARATION OF CONFORMITY............................................................................................................. 7 SAFETY ............................................................................................................................................................. 8 Recognize Safety Information ..............................................................................................................................................8 Safety Messages ..............................................................................................................................................................8 Information Messages ......................................................................................................................................................8 Maintain Safely ....................................................................................................................................................................9 -
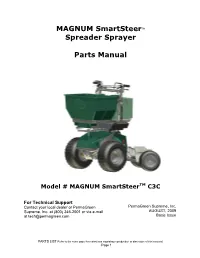
MAGNUM Smartsteertm Spreader Sprayer Parts Manual
MAGNUM SmartSteerTM Spreader Sprayer Parts Manual Model # MAGNUM SmartSteerTM C3C For Technical Support Contact your local dealer or PermaGreen PermaGreen Supreme, Inc. AUGUST, 2009 Supreme, Inc. at (800) 346-2001 or via e-mail at [email protected] Basic Issue PARTS LIST Refer to the cover page for restrictions regarding reproduction or disclosure of this material. Page 1 PAGE INTENTIONALLY LEFT BLANK PARTS LIST Refer to the cover page for restrictions regarding reproduction or disclosure of this material. Page 2 LIST OF ILLUSTRATIONS & TABLES Figure Title Page Figure 1. SmartSteer Group ..................................................................................4 Figure 2. Handlebar Control Group.........................................................................5 Figure 3. Hopper Inside & Rate Control Group .........................................................6 Figure 4. Hopper Open/Close Group .......................................................................7 Figure 5. Fertilizer Deflector & Remote Control Group...............................................8 Figure 6. Spray Tank Plumbing Group & Schematic........................................... 10-12 Figure 7. Spray Pump Plumbing Group ................................................................. 13 Figure 8. Spray Nozzle Group.............................................................................. 14 Figure 9. Squeeze Bottle Group ........................................................................... 15 Figure 10. Power Transmission, Pump -

Electric Brakes
Form No. 3414-761 Rev C MH-400SH2 and MH-400EH2 Material Handler Model No. 44931—Serial No. 316000001 and Up Model No. 44954—Serial No. 316000001 and Up Register at www.Toro.com. Original Instructions (EN) *3414-761* C This product complies with all relevant European Korea Electromagnetic Compatibility Certification (Decal directives, for details please see the separate product provided in separate kit) specific Declaration of Conformity (DOC) sheet. Electromagnetic Compatibility Handheld: Domestic: This device complies with FCC rules Part 15. Operation is subject to the following two conditions: (1) This device may not cause harmful interference and (2) this device must accept any interference that may be received, including RF2CAN: interference that may cause undesirable operation. This equipment generates and uses radio frequency energy and if not installed and used properly, that is, in strict accordance with the manufacturer's instructions, may cause interference to Singapore Electromagnetic Compatibility Certification radio and television reception. It has been type tested and found to comply with the limits for a FCC Class B computing device Handheld: TWM-240004_IDA_N4020–15 in accordance with the specifications in Subpart J of Part 15 of RF2CAN: TWM-240005_IDA_N4024–15 FCC Rules, which are designed to provide reasonable protection against such interference in a residential installation. However, there is no guarantee that interference will not occur in a Morocco Electromagnetic Compatibility Certification particular installation. -

Spinner® SPORT Owners Manual Contents
SPINNER® SPORT OWNERS MANUAL CONTENTS 1 Welcome to the Spinning® Program 2 Spinning® Program Safety 4 Your Spinner® Bike 5 Caring for Your Spinner® Sport Bike 6 Bike Assembly 8 Testing the Bike 9 Troubleshooting 10 Lubricating the Chain 11 Chain Tension Adjustment 12 Warranty © 2008 Mad Dogg Athletics, Inc. All rights reserved. Spin®, Spinning®, Spinner®, Spin Fitness® and the Spinning logo are registered trademarks of Mad Dogg Athletics, Inc. » sPINNER® SPORT OWNERS MANUAL 1 WELCOME to THE SPINNING® PROGRAM Millions worldwide have lost weight, gained energy and gotten into the best shape of their lives with the help of the Spinning® program—and the Spinner® bike with accompanying DVDs give you everything you need to join them. Ready to get started? These guidelines give you the insight you need to change your body and your life. ›› For more information on the Spinning program, Spinning gear and tips that will help you make the most of every ride visit, www.spinning.com. 2 SPINNING® PROGRAM SAFETY » Consult your physician before beginning this or any other exercise routine. Not all exercise programs are suitable for everyone. Discontinue any exercise that causes you discomfort, and consult a medical expert. » Ensure that adjustment knobs (seat height, seat fore-and-aft, and handlebar height) are properly secured and do not interfere with range of motion during exercise. » Children under the age of 16 should not ride the Spinner® Sport bike. » Do not insert any object, hands or feet into any openings, or expose hands, arms or feet to the drive mechanism or other potentially moving part of the bike. -
Brakes and Wheels Ever Try to Stop a Blown and Injected Big Block Car SECTION with Drum Brakes? Honestly, We Don’T Know How We Did It Back in the Day
Brakes and Wheels Ever try to stop a blown and injected big block car SECTION with drum brakes? Honestly, we don’t know how we did it back in the day. But this is no longer a concern as Danchuk has upgraded brake sys- tems to fit any build from mild to wild. In the brakes and wheels section you will find 10 2 and 4 wheel disc brake conversions, dropped spindles to lower your ride and keep you safe, power brake master and booster kits along with hydro-boost systems that don’t care how big your cam is. Our roller bearing conversion kit is just IN THIS SECTION: the ticket for projects using wider aftermarket wheels and stock spindles and we have rebuild • BRAKE CONVERSIONS kits for your original master or a replacement if yours is too far gone. • POWER BRAKES • BRAKE PADS You will also find new brake lines, parking brake • BRAKE SHOES assemblies, brake hoses, new drums, rotors, • MASTER CYLINDER front and rear wheel bearings, new parking brake brackets, screws, rollers and cables, and new • BRAKE LINES original style steel wheels that clear disc brakes. • EMERGENCY BRAKES We offer custom wheels by American Racing and • WHEELS Showwheels as well as correct style wide white wall tires and wide white radials too, brand new • TIRES stainless hub caps for Bel Air or 210 and our own • HUBCAPS decal kits to bring yours back to showroom condi- tion. And how could we leave out the Danchuk ‘57 Bel Air wheel spinner assemblies, proudly made in the USA! Danchuk, There’s no comparison! Brakes Standard onversion C rake B Upgraded Stock SPindle Front Disc Brake Conversion Components Standard kit contains rotors, calipers, pads, seals, bearings and rubber hoses. -

Commercial Spinner® Bikes Love Your Ride
COMMERCIAL SPINNER® BIKES LOVE YOUR RIDE. The Spinning® program embodies many things–passion, heritage, innovation, quality and style, to name a few. 25 years ago, our passion for road cycling led us to invent the indoor cycling category and create a revolution in the fitness industry. As industry leaders, we are committed to developing the world’s most respected instructor certification and continuing education programs, as well as offering the world’s best indoor cycling bikes. A bike should work so well that you don’t have to think about it. It should seamlessly respond to the rider’s input, feel comfortable for the duration of a long workout, and withstand the extreme level of use that gym and studio bikes take day in and day out Quality is our highest priority in everything we do, from crafting our Spinner® bikes to developing our Spinning education programs. We’ve recently partnered with Precor®, a leader in fitness innovation and the producer of the world’s best fitness equipment, to deliver that quality with our newest line of commercial Spinner® bikes. We sweat over every detail in our bike design, from our original perimeter-weighted flywheel system to our innovative threadless pedal connections. We’ve established the gold standard for indoor cycling bikes and education for everyone. This is the commitment of Spinning: to bring you the best indoor cycling experience in the world. With innovative design and a dedication to supporting club operators and riders, Precor and Spinning are raising the bar for indoor cycling in 2016. WHAT MAKES A SPINNER® BETTER. -
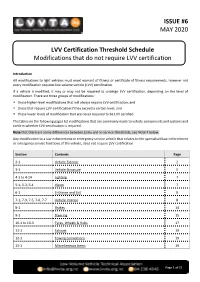
LVV Certification Modification Threshold Schedule
ISSUE #6 MAY 2020 LVV Certification Threshold Schedule Modifications that do not require LVV certification Introduction All modifications to light vehicles must meet warrant of fitness or certificate of fitness requirements, however not every modification requires low volume vehicle (LVV) certification. If a vehicle is modified, it may or may not be required to undergo LVV certification, depending on the level of modification. There are three groups of modifications: ▪ those higher-level modifications that will always require LVV certification; and ▪ those that require LVV certification if they exceed a certain level; and ▪ those lower levels of modification that are never required to be LVV certified. The tables on the following pages list modifications that are commonly made to vehicle components and systems and confirm whether LVV certification is required. Note that there are some differences between Entry and In-service thresholds, see Note 4 below. Any modification to a law enforcement or emergency service vehicle that relates to the specialised law enforcement or emergency service functions of the vehicle, does not require LVV certification. Section Contents Page 2-1 Vehicle Exterior 2 3-1 Vehicle Structure 5 4-1 to 4-14 Lighting 7 5-1, 5-3, 5-4 Vision 7 6-1 Entrance and Exit 8 7-1, 7-3, 7-5, 7-6, 7-7 Vehicle Interior 8 8-1 Brakes 14 9-1 Steering 15 10-1 to 10-3 Tyres, Wheels & Hubs 17 11-1 Exhaust 19 12-1 Towing connections 19 13-1 Miscellaneous Items 19 Page 1 of 21 Notes The document refers in several places to notes. -

SECTION at a GLANCE: Disc Brake Conversion Kits
10. Brakes & Wheels THANKS FOR POSTING TO: SECTION AT A GLANCE: Disc Brake Conversion Kits ................................SECTION447 Baer Brake Kits ................................................ 453 Wilwood Brakes ................................................ 454 Dropped Spindles ............................................. 458 Proportioning Valves .......................................... 459 Hydraulic Assist Kits ......................................... 460 TOM NAVLAN Brake Boosters ................................................. 461 Master Cylinder ................................................ 462 Vacuum Pump .................................................. 465 Brake Rotors .................................................... 466 Brake Drum ..................................................... 467 Brake Hoses ..................................................... 468 Brake Hardware ................................................ 469 RICHARD DREW Parking Brake ................................................... 470 Emergency Brake .............................................. 471 E-Brake Kit ...................................................... 472 Brake Lines ...................................................... 474 Roller & Wheel Bearings .................................... 476 Wheels ............................................................ 477 Wheel Spinners ................................................ 477 TRAVIS KITCHENS American Racing .............................................. 479 Wheel Covers .................................................. -

Owner's Manual
bikes Owner’s Manual All content © 2019 Pello Bikes 1 Printed on recycled paper Smile. Ride. Repeat... Congratulations, you are the owner of a brand new Pello Bike. Untold adventures await you, but before you head out to conquer the paths and trails, please take time to read this owner’s manual. You will find everything you need to properly set up your bike and some tips to our new cyclists for being safe whilst having fun. Beyond that, you will even find some tips for maintaining your bike and keeping it in its best working order in the future. If you have any questions or issues with your Pello bike now or in the future, please drop us a note at info@ pellobikes.com Enjoy your time out there; cycling is a family affair and a great way to spend time together. 2 Content Page Get to know your Pello 4-5 What do I need to put it together? 6 Assembling your bike 7-19 Bike fit 20 Checklist, Review and First Ride 21 Maintaining your bike 22 Inflating tires 24 Safety tips 25 Riding tips 26 Returns/Warranty/Contact 27 Journal 28 Maintenance Tracker 29 GrowPello 30 Color the Bike 31 Lets Ride! 32 bikes pellobikes.com All content © 2019 Pello Bikes 3 Get to know your Pello 16 8 17 18 9 20 19 13 15 12 1 Frame 5 Shifter 9 Spokes 2 Fork 6 Stem 10 Valve Stem 3 Handlebar 7 Headset (Presta) 4 Brake Lever 8 Tire 4 Get to know your Pello 3 4 6 5 7 2 1 14 11 21 10 11 Rim 15 Pedal 19 Chain guard 12 Crank Arm 16 Saddle 20 Dérailleur 13 Chain ring 17 Seatpost 21 Disc Brake 14 Bottom Bracket 18 Seatpost Clamp Assembly 5 What do I need to put it together? Now that your bike has been delivered, there are a few steps you need to take to get it ready to ride. -

CAP Safety Resource Manual
CENTRAL ARIZONA PROJECT SAFETY RESOURCE MANUAL Revised January 1, 2020 Most recent edit: October 12, 2020 MAIN TABLE OF CONTENTS SECTION 1: GENERAL INFORMATION SECTION 2: SAFETY RULES SECTION 3: SAFETY PROGRAMS AND POLICIES SECTION 4: OSHA INFORMATION SECTION 5: PERSONAL PROTECTIVE EQUIPMENT SECTION 6: GLOSSARY OF SAFETY TERMS SECTION 1 GENERAL INFORMATION: • GENERAL MANAGER’S MEMO • SAFETY VISION SUPPORT TEAM (SVST) MISSION, CHARTER, VALUES AND OPERATING AGREEMENT • SAFETY POLICIES FORWARD Ted Cooke, General Manager Safety is an organizational value at CAP. As a result, it is something we want you to be thinking about every day. It is not just for the big or dangerous jobs but for every job, every time. This Safety Resource Manual is intended to provide you with clear direction about CAP's safety program. I hope when reviewing it that you better understand why your safety, at work and at home, is so important. The content of this manual was developed by the CAP Safety Vision Support Team, the CAP Environmental, Health and Safety Department (EHS) and CAP Managers & Supervisors. The rules and programs are essential to maintaining a workplace free of safety-related incidents and injuries. Our goal for you after reviewing this manual is that you will be familiar with CAP's safety procedures and able to identify unsafe conditions that could lead to an injury, damage to equipment or interruption of work activities. It is also very important you fully understand the process for alerting others before starting work in an unsafe manner. The expectation at CAP is that every employee, no matter the job, will make safety a value. -

TECHNICAL DATA SHEET URBAN ARROW CARGO Cargo L | Bosch Performance CX | 500Wh | Disc Brakes*
TECHNICAL DATA SHEET URBAN ARROW CARGO Cargo L | Bosch Performance CX | 500Wh | Disc brakes* Part Specification Rear frame Aluminium Motor Bosch Performance CX, 250W (Gen 2) Battery Bosch PowerPack 500Wh Display Bosch Intuvia Rear hub, internal gear Enviolo Cargo, 36H Front hub Shimano HB-M525A, 36H Shifter Enviolo Trekking Drive line Chain, KMC 90L Rear sprocket Enviolo 20T flat Front sprocket Hebie chainring 18T Chainguard Hebie chainglider front 18T, rear 20T, 3P Rear brake Shimano Deore M6000 + RT-66 180mm disc Front brake Shimano Deore M6000 + RT-66 180mm disc Brake pads Shimano resin Rear light Spanninga Plateo XE 6V-36V Front light Spanninga Kendo XE 6V-36V Front fork Grind suspension fork Handlebar Ergotec Moon cruiser 25,4 black Stem TranzX JD-ST17-2 black 1-1/8 25,4 110mm Pedals Pedals UP-231 black Seatpost Satori Trident 31,6 350mm black Saddle Selle Royal Rio Plus Cranks Andel ISIS 170mm Front tire Schwalbe Big Ben 55-406 Rear tire Schwalbe Big Ben 55-559 Valve Dunlop Rear fender SKS 65mm 26” black matte Front fender SKS 65mm 20” black matte Frame colour Black & white Weight 47 kg Dimensions L 274cm x W 70cm x H 110cm Platform size L 74cm x W 60cm Max. load capacity (incl. bike and rider) 275 kg * As Urban Arrow works to continuously improve its products all specifications are subject to change. Hence, no rights can be derived from this publication. SPECIFICATION SHEET URBAN ARROW CARGO Cargo L | Bosch Performance CX | 500Wh | Zee Disc brakes* Part Specification Rear frame UA4, aluminium Motor Bosch performance CX, 250W, 75Nm -

V-Box Truck Electric Auger Spreader Model 775, 955, & 975
V-BOX TRUCK ELECTRIC AUGER SPREADER MODEL 775, 955, & 975 OPERATOR’S MANUAL DO NOT USE OR OPERATE THIS EQUIPMENT UNTIL THIS MANUAL HAS BEEN READ AND THOROUGHLY UNDERSTOOD PART NUMBER 79204252 Rev. B Table of Contents 1 TABLE OF CONTENTS 79204252 Rev. B 4/17 Hiniker/79204252RevB TO THE PURCHASER .................................................................................................................. 2 SAFETY ......................................................................................................................................... 3 OPERATING PROCEDURES .................................................................................................... 4-8 General Information................................................................................................................ 4 Sander Control Box ................................................................................................................ 5 Spread Control ....................................................................................................................... 6 Spread Pattern ....................................................................................................................... 6 Inverted V Settings ................................................................................................................. 7 Swing Away Chute ................................................................................................................. 7 Storage ..................................................................................................................................