CRK Series USER MANUAL
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Four-Wire Signal Conditioners Two-Wire Signal Conditioners
Four-wire Signal Conditioners Two-wire Signal Conditioners Function Modules Limit Alarms Power Transducers Remote I/O PC Recorder 5-2-55, Minamitsumori, Nishinari-ku, Osaka 557-0063 JAPAN Tel: +81(6)6659-8201 Fax: +81(6)6659-8510 Paperless Recorders URL: www.m-system.co.jp 20092009 E-mail: [email protected] Panel Meters Lightning Surge Protectors Electronic Actuators Position Sensors EC-Z906 Rev.6 January 2009 500365 ISO 9001 / ISO 14001 Certified No matter what combination of process signal I/O, power input and mounting configuration you need, M-System can meet your requirements when others can't. Just what you would expect from the world's largest supplier of high-performance interface solutions. Count On Us for Quality & Reliability Quality: M-System delivers more than 500,000 I/O units (300,000 units of signal conditioners) every year, and we are very proud of our manufacturing and quality control process certified by ISO 9001. Reliability: M-System does not easily stop manufacturing products once released in the market, unless we are able to supply other products of equal or better quality to replace with, because we believe it is a very important responsibility as a leading manufacturer in the world to continue to serve people who maintain the performance of process control systems. Meeting with Modern Industrial Trends Count On Us for Fast & Precise Delivery Time M-System offers an enormous selection of I/O products including signal conditioners, distributed network I/O, paperless recorders, panel meters, surge suppressors and valve actuators. Not only that, we are continuously The standard manufacturing lead time for most M-System's signal conditioners is 5 days. -
Machine Controller and AC Servo Drive Solutions Catalog
Machine Controller and AC Servo Drive Solutions Catalog Certified for ISO9001 and ISO14001 JQA-0422 JQA-EM0202 Ever Forward, Ever Better 100 Years ToTogethergether withwith Our CustomersCustomers Since its founding in 1915 as a manufacturer for motors, Yaskawa Electric has capitalized on its motor drive technology to provide continuing support for the key industries of the times, first for factory automation, and today, for mechatronics and robotics. Today, Yaskawa is striving to make effective use of its technologies developed in the motion control, robotics, and system engineering sectors, and is also taking on the challenges of achieving the highly efficient utilization of natural energy and the creation of a society in which people and robots exist side-by-side. Throughout our extensive 100-year history, we have consistently sought to develop the world’s leading technologies and applications that would best delight and be most useful to our customers. Yaskawa will continue to treasure the results, technologies, and reputation we have achieved thus far, and look ahead to create“ e-motional solutions” for emerging global challenges. Motion Control Robotics System Engineering 1915 1930 1990 2015 2 Environmental Energy Robotics Human Assist Mechatronics Solutions 3 Changing Motion, Changing the World Yaskawa is committed to developing innovative mechatronics products and offering new solutions to the world. Yaskawa's technology and mechatronics products are used in a wide-variety of industrial sectors, systems, and machinery, and enable ultra-high-speed and ultra-precision control. In addition to industrial sectors, our motion technology has a nearly limitless range of applications, including familiar sectors such as lifestyles, medicine, and welfare. -
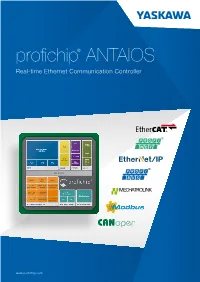
Profichip® ANTAIOS Real-Time Ethernet Communication Controller
profichip® ANTAIOS Real-time Ethernet Communication Controller www.profichip.com Discover new ways ... • Multiple fieldbus support • 288 MHz ARM Cortex-A5 processor • Ethernet interface with real-time switch • Gigabit Ethernet MAC • SliceBus® master ... of industrial communication. One small chip combines fast real-time Ethernet technology with traditional fieldbuses and a backplane master. ARM Cortex-A5 Core Fieldbus Options and Stacks SliceBus Master Controller • 288 MHz clock speed • Licensed with ANTAIOS • Backplane or local bus • 64-bit floating-point unit » PROFIBUS Slave DP-V0 communication • Little-endian byte ordering » PROFINET I/O Device • Local single Master for I/O Modules • 32/32 kbyte instruction/data cache RT/IRT library • Up to 64 nodes • Debug interfaces: » EtherCAT Slave • High speed of 48 Mbit/s JTAG, ETM, ETB, ITM • Purchasing stacks (source codes) • Alarm and error handling » PROFIBUS Slave DP-V1/V2 Advanced Real-time Ethernet » PROFIBUS Master Memory Interfaces Switch » PROFINET I/O Device RT/IRT • MMC/SD card Controller • 3x port switches » PROFINET I/O Controller RT/IRT • 8-bit NAND flash Controller (2 external Ethernet + 1 internal) » EtherNET/IP Adapter • DDR2 RAM 16-bit Controller • Integrated PHYs » Mechatrolink-III/IV Master/Slave (max. 800 MByte/s) • Programmable switch » CANopen • Microcode and software stack- » Others on demand Other Features based implementation for • DMA Controller (8 channels) ® Standard Interfaces » PROFINET I/O Device RT/IRT • IRQ Controller (8 priority levels) ® » EtherCAT Slave • USB 2.0 Device Controller • Watchdog » Mechatrolink-III/IV Master/Slave (480 Mbit/s) • Six independent 32-bit timers » EtherNet/IP Adapter • 2 x UART (12 Mbit/s) with prescaler » Other Ethernet protocols • Gigabit Ethernet MAC • Technology function on demand (supports 10/100/1000 Mbit/s module (TechIO) modes) » Max. -

Selection Table
Y203-EN2-02-Katalog.book Seite 246 Mittwoch, 24. Mai 2006 2:22 14 Selection table Model G7 F7 L7 Type World’s first three level inverter The industrial workhorse Made to drive lifts architecture 400 V three-phase 0.4 kW to 300 kW 0.4 kW to 300 kW 4.0 kW to 55 kW 200 V three-phase 0.4 kW to 110 kW 0.4 kW to 110 kW 3.7 kW to 55 kW 200 V single-phase N/A N/A N/A Application High performance, long cable lines General and high-end applications Lift control with asynchronous or synchronous motors Control method Open and close loop for vector and Open and close loop for vector and Open and close loop for vector and V/F control. V/F control. V/F control. Torque features 150% at 0.0 Hz (CLV) 150% at zero speed (CLV) 150% at zero speed (CLV) 150% at 0.3 Hz (OLV) 150% at 0.5 Hz (OLV) 150% at 0.5 Hz (OLV) Connectivity Memobus Memobus Memobus DeviceNet DeviceNet DeviceNet PROFIBUS-DP PROFIBUS-DP PROFIBUS-DP CANopen CANopen CANopen LONWorks LONWorks LONWorks Ethernet Ethernet Ethernet MECHATROLINK-II Customisation options - PLC option board - PLC option board - PLC option board - Inverter application software - Inverter application software - Inverter application software Page 249 269 289 Model E7 V7 J7 Type Drive your energy cost down Sensorless vector control in a Small, simple and smart pocket sized inverter 400 V three-Phase 0.4 kW to 300 kW 0.2 kW to 7.5 kW 0.2 kW to 4.0 kW 200 V three-Phase 0.4 kW to 110 kW 0.1 kW to 7.5 kW 0.1 kW to 4.0 kW 200 V single-Phase N/A 0.1 kW to 4.0 kW 0.1 kW to 1.5 kW Application Pumps and fans (variable torque) Compact general purpose Simple speed control Control method V/F control Sensorless vector and V/F control V/F control Torque features 120% at 0.5 Hz. -

Hardware Reference Manual Reference Hardware I51E-EN-04 Trajexia Motion Control System Control Motion Trajexia
HARDWARE REFERENCE MANUAL REFERENCE HARDWARE GRT1-ML2 TJ1-MC04, TJ1-MC16, TJ1-ML04, TJ1-ML16, TJ1-PRT, TJ1-DRT, TJ1-CORT, TJ1-FL02 TJ1-CORT, TJ1-DRT, TJ1-PRT, TJ1-ML16, TJ1-ML04, TJ1-MC16, TJ1-MC04, Trajexia motion control system control motion Trajexia I51E-EN-05 No. Cat. Cat. No. I51E-EN-04 Trajexia motion control system HARDWARE REFERENCE MANUAL Omron Europe B.V. Wegalaan 67-69, NL-2132 JD, Hoofddorp, The Netherlands. Tel: +31 (0) 23 568 13 00 Fax: +31 (0) 23 568 13 88 www.omron-industrial.com Austria France Netherlands Spain Tel: +43 (0) 2236 377 800 Tel: +33 (0) 1 56 63 70 00 Tel: +31 (0) 23 568 11 00 Tel: +34 913 777 900 www.omron.at www.omron.fr www.omron.nl www.omron.es Belgium Germany Norway Sweden Tel: +32 (0) 2 466 24 80 Tel: +49 (0) 2173 680 00 Tel: +47 (0) 22 65 75 00 Tel: +46 (0) 8 632 35 00 www.omron.be www.omron.de www.omron.no www.omron.se Czech Republic Hungary Poland Switzerland Tel: +420 234 602 602 Tel: +36 1 399 30 50 Tel: +48 (0) 22 645 78 60 Tel: +41 (0) 41 748 13 13 www.omron-industrial.cz www.omron.hu www.omron.pl www.omron.ch Denmark Italy Portugal Turkey Tel: +45 43 44 00 11 Tel: +39 02 326 81 Tel: +351 21 942 94 00 Tel: +90 216 474 00 40 www.omron.dk www.omron.it www.omron.pt www.omron.com.tr Finland Middle East & Africa Russia United Kingdom Tel: +358 (0) 207 464 200 Tel: +31 (0) 23 568 11 00 Tel: +7 495 648 94 50 Tel: +44 (0) 870 752 08 61 www.omron.fi www.omron-industrial.com www.omron-industrial.ru www.omron.co.uk Authorised Distributor: Note: Although we do strive for perfection, Omron Europe BV and/or its subsidiary and affiliated companies do not warrant or make any representations regarding the correctness or completeness of information described in this catalogue. -

Industrial Communication Protocols Supported on Sitara™ Processors
www.ti.com Table of Contents Application Report Industrial Communication Protocols Supported on Sitara™ Processors ABSTRACT This document shows the industrial communication protocols supported by each of the devices in the Sitara™ Arm® Cortex®-A processor portfolio, as well as where and how to get these protocols. Table of Contents 1 Introduction.............................................................................................................................................................................3 2 Industrial Communication Partners......................................................................................................................................4 3 Ethernet-Based Protocols......................................................................................................................................................5 3.1 PROFINET® ...................................................................................................................................................................... 5 3.2 EtherCAT® .........................................................................................................................................................................6 3.3 EtherNet/IP® ......................................................................................................................................................................6 3.4 OPC UA..............................................................................................................................................................................6 -

EU Declaration of Conformity
EU Declaration of Conformity Original Ref.No. VKI-S2104-19 YASKAWA ELECTRIC CORPORATION 2-13-1 Nishimiyaichi Yukuhashi City Fukuoka Pref., 824-8511 Japan declares under sole responsibility conformity of the following products 1000 Series and GEM Series option Model: Type Model number Description PG-B3 Motor PG Feedback Open Collector Interface PG-X3 Motor PG Feedback Line Driver Interface PG option PG-E3 ERN1387 Encoder PG-F3 EnDat Encoder PG-RT3 Motor PG Feedback Resolver Interface DI-A3 Digital Input DO-A3 Digital Output I/O option AI-A3 Analog Input AO-A3 Analog Monitor AI-V3/J Potentiometer Option (for J1000) “/x” of Model number denotes applicable Inverter model. (V:V1000, J:J1000, blank:1000 series and GEM series) EU Declaration of Conformity Original Ref.No. VKI-S2104-19 Type Model number Description SI-C3 CC-Link SI-C3/V CC-Link (for V1000) SI-N3 DeviceNet SI-N3/V DeviceNet (for V1000) SI-S3 CANopen SI-S3/V CANopen (for V1000) SI-P3 PROFIBUS-DP SI-P3/V PROFIBUS-DP (for V1000) Communication SI-W3 LONWORKS SI-M3/V CompoNet Communications Option (for V1000) option SI-T3 MECHATROLINK-Ⅱ SI-T3/V MECHATROLINK-Ⅱ (for V1000) SI-ET3 MECHATROLINK-Ⅲ SI-ET3/V MECHATROLINK-Ⅲ (for V1000) SI-232/J Remote Operator Interface (for J1000) RS-232C Serial Communication Interface SI-232/JC (for J1000 special purpose) RS-422/485 Serial Communication Interface SI-485/J (for J1000) JOHB-SMP3 Multi Protocol Ethernet Interface “/x” of Model number denotes applicable Inverter model. (V:V1000, J:J1000, blank:1000 series and GEM series) Directive of the European Parliament and Council: Electromagnetic Compatibility Directive (EMC) : 2014/30/EU Restriction of the use of certain hazardous substances (RoHS) : 2011/65/EU Applied harmonized Standards: EN 61800-3:2004/A1:2012 EN IEC 63000:2018 Place / Date YASKAWA ELECTRIC CORPORATION 2-13-1 Nishimiyaichi Yukuhashi City Fukuoka Pref., 824-8511 Japan Drives Division 16th. -
The Best Fieldbus for Your PLC: 5 Fieldbuses Compared for Industry 4.0
The Best Fieldbus For Your PLC: 5 Fieldbuses Compared For Industry 4.0 WHITE PAPER WHITE PAPER 2015/2016 Executive Summary For machine builders, hardware programmable logic controllers (PLCs) are an industry norm. But like technology as a whole, machine automation is evolving quickly – including PLCs. Original equipment manufacturers (OEMs) are now turning to software-based industrial PLCs, or simply soft PLCs. Soft PLCs offer a variety of benefits over hardware, including greater productivity, precision performance, cost savings, speed-to-market and the ability to “future proof” your infrastructure with a platform-based approach for real-time processes like motion control and machine vision. One of the greatest benefits of a soft PLC is the ability to choose a more flexible network. When traditionally using a vendor’s hardware PLC, you are largely obligated to use their preferred network protocol as well to maximize performance. While vendors attempt to make their choice of network credible by claiming support for third-party products, the reality is that the customer is essentially “locked-in”. In order to “optimize” your hardware PLC, you generally stick with motors and drives from the same vendor that are compatible with their preferred network. Hardware PLC vendors do this to be assigned a premium for their products and to gain a competitive advantage over other vendors in their ecosystem. This dramatically limits your ability to use best- of-breed products, or moreover, “plug-and-play” products of your choosing, to grow your system as required by your business demands and the pace of technology. Therefore choosing the right PLC for the long term is ultimately about choosing the right network to use. -
Servoworks CNC
ServoWorks™ CNC: Ultimate PC-Based, Truly Open-Architecture Soft CNC Solutions Powerful PC-Based Affordable Scalable Complete PC-based solutions for critical CNC requirements Soft Servo’s ServoWorks™ CNC Product Line Soft Servo Systems offers the following CNC products based on ServoWorks™ soft CNC technology: ServoWorks S-100M, S-120M, and S-140M for mills and machining centers ServoWorks S-100T for lathes LadderWorks PLC, for integrating soft PLC with CNC, is bundled with all our ServoWorks CNC products. ServoWorks MotionLite, a free utility for servo configuration, tuning and testing is included with ServoWorks S-100M, S-120M, and S-140M. (ServoWorks S-100T has its own servo configuration, tuning and testing functions.) Soft Servo Systems also offers extensive software development tools for developing customized ServoWorks solutions. ServoWorks™: Unique Soft CNC Technology All of Soft Servo Systems' CNC products are based on ServoWorks, our unique and proprietary PC-based motion control software technology. ServoWorks uses a single host CPU to perform all real-time servo and CNC tasks, including feedback loops, accelerations/decelerations, multi-axis coordination, G code processing, NC path generation and PLC, as well as providing the graphical user interface, program interpreting/loading, file management, data processing and network communications, all simultaneously. ServoWorks CNC controllers run on top of the core ServoWorks software on Windows XP or Windows 7, with a real-time kernel. Several servo communications platforms are available for off-the-shelf ServoWorks CNC products: VersioBus™ II, EtherCAT, Panasonic Realtime Express™ (RTEX), CANopen, MECHATROLINK™ II, and MECHATROLINK™ III. 1 Advantages of ServoWorks CNC Technology: Powerful and High Performing Unique soft CNC motion and soft CNC technology fully exploitsPowerful the powerful and relatively inexpensive CPUs in personal computers to provide superior, incomparable CNC performance, allowing customers to increase productivity and reliability. -

Yaskawa Inverters for Open Field Networks
General-purpose Inverter with Advanced Vector Control For Catalog No. IM drives Varispeed G7 KAE-S616-60 The Varispeed G7, the first general-purpose inverter in the world, features three-level control method with advanced vector control. Features Three-level control solves many problems of 400V-class inverters: Low surge voltage, low electrical noise, reduced leakage current, low acoustic noise, and protection against electrolytic corrosion of motor bearings caused by high voltages in the shaft. With high performance and functionality by current vector control, the Varispeed G7 achieves the powerful and high-precision operation necessary for a diverse range of equipment and machinery. Model Designation Specifications CIMR- G7 A20P4 Item Description Power Supply 200 V (three-phase) 400 V (three-phase) Motor Output Range 0.4 to 110 kW 0.4 to 300 kW Inverter Control Method Sine wave PWM [V/ f, vector with PG, open loop vector (switched by parameter)] Varispeed G7 series Frequency Control Range 0.1 to 400 Hz Specifications Overload Capacity 150% rated output current for 1 minute A : Japanese Accel/Decel Time 0.01 to 6000.0 s (Accel/Decel time setting independently) domestic standards Protective Functions Motor overload protection, instantaneous overcurrent, overload, overvoltage, undervoltage, stall prevention, etc. Voltage Class Standard Functions PID control, energy-saving control, toruque limit, momentary power loss restart, speed search, etc. 2 : Three-phase 200 V 4 : Three-phase 400 V Harmonic Wave Prevention DC reactor: Optional for inverters less than 15kW; provided for inverters of 18.5kW or more. MECHATROLINK (Optional card: SI-T*1) Max. Applicable Motor Output Type MECHATROLINK- MECHATROLINK- (P = decimal point) Baud Rate 10 Mbps 4 Mbps 0P4:0.4kW Network Size 30 nodes 15 nodes to 300:300kW String Size 17 bytes or 32 bytes 17 bytes DeviceNet (Optional card: SI-N1*2) Baud Rate 125 k / 250 k / 500 kbps Messages Group 2 Only, UCMM without connection port, Explicit messages, and polled I/O messages. -

Profichip® TRITON Gigabit Ethernet Communication Controller, PLC, Backplane Master and Motion Controller in One Chip
profichip® TRITON Gigabit Ethernet Communication Controller, PLC, Backplane Master and Motion Controller in One Chip www.profichip.com Main Features • Future ready with TSN support, DDR4, PCI-Express, and Security Core • No heatsink needed thanks to low power consumption • Low Total Cost of Ownership due to integrated functionalities (Backplane Master, PHYs, etc.) • 3 cores with high single thread performance best suited for motion and PLC tasks Triton combines industrial gigabit Ethernet communication with a fast and reliable backplane system as well as a powerful motion/automation multicore processor in one product with low power dissipation. Discover New Ways Security Fieldbus Options and Stacks • For high-speed number crunching • Secure boot (signed and encrypted) • Licensed with TRITON • For industrial real-time • integrated eFuse for » PROFIBUS Slave DP-V0 communication customer key storage » PROFINET IO Device • For reliable and synchronous • AES 256 GCM RT/IRT library backplane communication hardware acceleration » EtherCAT Slave • Everything secure and • True random number generator • Purchasing stacks (source codes) with low power • IOMPU (memory protection » PROFIBUS Slave DP-V1/V2 for I/O devices) » PROFIBUS Master Processor System » PROFINET IO Device RT/IRT • 3 x ARM Cortex A17 cores Advanced Real-Time Gigabit » PROFINET IO Controller RT with up to 1.26 GHz Ethernet Solution » EtherNET/IP Adapter • 64-bit floating point unit per core • 4 x Gbit Ethernet port » Mechatrolink-III/IV Master/Slave • 64/32 kB instruction/data cache -

Ethercat Slave
ANTAIOS Datasheet ANT1000/1001 | Revision 1.26 Liability Exclusion We have tested the contents of this document regarding agreement with the hardware and software described. Nevertheless, there may be deviations and we do not guarantee complete agreement. The data in the document is tested periodically, however. Required corrections are included in subsequent versions. We gratefully accept suggestions for improvements. Copyright Copyright © YASKAWA Europe GmbH 2021. All Rights Reserved. Unless permission has been expressly granted, passing on this document or copying it, or using and sharing its content are not allowed. Offenders will be held liable. All rights re- served, in the event a patent is granted or a utility model or design is registered. This document is subject to changes without prior notice. ANT1000/1001 Datasheet Revision 1.26 2/152 Copyright © YASKAWA Europe GmbH, 2021 Table of Contents 1 Overview ........................................................................................ 11 2 Block Diagram ............................................................................... 12 3 Key IPs and Features .................................................................... 13 3.1 ARM Cortex-A5 CPU Core ...................................................................................13 3.2 Advanced Real-Time Ethernet Switch ..................................................................13 3.3 Integrated 100Base-TX Ethernet PHYs (2x) .........................................................14 3.4 SNAP+ (SliceBus)