The Co-Ordination of Insect Movements Iii
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Water Beetles
Ireland Red List No. 1 Water beetles Ireland Red List No. 1: Water beetles G.N. Foster1, B.H. Nelson2 & Á. O Connor3 1 3 Eglinton Terrace, Ayr KA7 1JJ 2 Department of Natural Sciences, National Museums Northern Ireland 3 National Parks & Wildlife Service, Department of Environment, Heritage & Local Government Citation: Foster, G. N., Nelson, B. H. & O Connor, Á. (2009) Ireland Red List No. 1 – Water beetles. National Parks and Wildlife Service, Department of Environment, Heritage and Local Government, Dublin, Ireland. Cover images from top: Dryops similaris (© Roy Anderson); Gyrinus urinator, Hygrotus decoratus, Berosus signaticollis & Platambus maculatus (all © Jonty Denton) Ireland Red List Series Editors: N. Kingston & F. Marnell © National Parks and Wildlife Service 2009 ISSN 2009‐2016 Red list of Irish Water beetles 2009 ____________________________ CONTENTS ACKNOWLEDGEMENTS .................................................................................................................................... 1 EXECUTIVE SUMMARY...................................................................................................................................... 2 INTRODUCTION................................................................................................................................................ 3 NOMENCLATURE AND THE IRISH CHECKLIST................................................................................................ 3 COVERAGE ....................................................................................................................................................... -
Hundreds of Species of Aquatic Macroinvertebrates Live in Illinois In
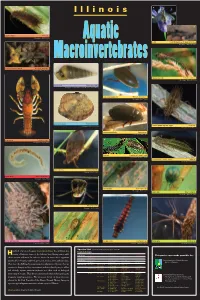
Illinois A B aquatic sowbug Asellus sp. Photograph © Paul P.Tinerella AAqquuaattiicc mayfly A. adult Hexagenia sp.; B. nymph Isonychia sp. MMaaccrrooiinnvveerrtteebbrraatteess Photographs © Michael R. Jeffords northern clearwater crayfish Orconectes propinquus Photograph © Michael R. Jeffords ruby spot damselfly Hetaerina americana Photograph © Michael R. Jeffords aquatic snail Pleurocera acutum Photograph © Jochen Gerber,The Field Museum of Natural History predaceous diving beetle Dytiscus circumcinctus Photograph © Paul P.Tinerella monkeyface mussel Quadrula metanevra common skimmer dragonfly - nymph Libellula sp. Photograph © Kevin S. Cummings Photograph © Paul P.Tinerella water scavenger beetle Hydrochara sp. Photograph © Steve J.Taylor devil crayfish Cambarus diogenes A B Photograph © ChristopherTaylor dobsonfly Corydalus sp. A. larva; B. adult Photographs © Michael R. Jeffords common darner dragonfly - nymph Aeshna sp. Photograph © Paul P.Tinerella giant water bug Belostoma lutarium Photograph © Paul P.Tinerella aquatic worm Slavina appendiculata Photograph © Mark J. Wetzel water boatman Trichocorixa calva Photograph © Paul P.Tinerella aquatic mite Order Prostigmata Photograph © Michael R. Jeffords backswimmer Notonecta irrorata Photograph © Paul P.Tinerella leech - adult and young Class Hirudinea pygmy backswimmer Neoplea striola mosquito - larva Toxorhynchites sp. fishing spider Dolomedes sp. Photograph © William N. Roston Photograph © Paul P.Tinerella Photograph © Michael R. Jeffords Photograph © Paul P.Tinerella Species List Species are not shown in proportion to actual size. undreds of species of aquatic macroinvertebrates live in Illinois in a Kingdom Animalia Hvariety of habitats. Some of the habitats have flowing water while Phylum Annelida Class Clitellata Family Naididae aquatic worm Slavina appendiculata This poster was made possible by: others contain still water. In order to survive in water, these organisms Class Hirudinea leech must be able to breathe, find food, protect themselves, move and reproduce. -

Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae
Eastern Illinois University The Keep Masters Theses Student Theses & Publications 1986 Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) and Two Anuran Tadpole Species (Bufo americanus and Hyla crucifer) Todd S. Campbell Eastern Illinois University This research is a product of the graduate program in Zoology at Eastern Illinois University. Find out more about the program. Recommended Citation Campbell, Todd S., "Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) and Two Anuran Tadpole Species (Bufo americanus and Hyla crucifer)" (1986). Masters Theses. 2728. https://thekeep.eiu.edu/theses/2728 This is brought to you for free and open access by the Student Theses & Publications at The Keep. It has been accepted for inclusion in Masters Theses by an authorized administrator of The Keep. For more information, please contact [email protected]. THESIS REPRODUCTION CERTIFICATE TO: Graduate Degree Candidates who have written formal theses. SUBJECT: Permission to reproduce theses. The University Library is rece1vmg a number of requests from other institutions asking permission to reproduce dissertations for inclusion in their library holdings. Although no copyright laws are involved, we feel that professional courtesy demands that permission be obtained from the author before we allow theses to be copied. Please sign one of the following statements: Booth Library of Eastern Illinois University has my permission to lend my thesis to a reputable college or university for the purpose of copying it for inclusion in that instituHon' s library or research holdings. Date Author I respectfully request Booth Library of Eastern Illinois University not allow my thesis be reproduced because ��-�� Date Author m Factors Affecting The Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) And Two Anuran Tadpole Species (Bufo americanus and Hyl a crucifer) . -

Algae and Invertebrates of a Great Basin Desert Hot Lake: a Description of the Borax Lake Ecosystem of Southeastern Oregon
Conference Proceedings. Spring-fed Wetlands: Important Scientific and Cultural Resources of the Intermountain Region, 2002. http://www.wetlands.dri.edu Algae and Invertebrates of a Great Basin Desert Hot Lake: A description of the Borax Lake ecosystem of southeastern Oregon Joseph Furnish Pacific Southwest Region 5, U.S. Department of Agriculture, Forest Service, Vallejo, CA [email protected] James McIver Pacific Northwest Research Station, U.S. Department of Agriculture, Forest Service, LaGrande, OR Mark Teiser Department of Oceanography, Oregon State University, Corvallis, OR Abstract Introduction As part of the recovery plan for the Borax Lake is a geothermally heated endangered chub Gila boraxobius (Cyprinidae), alkaline lake in southeastern Oregon. It a description of algal and invertebrate represents one of the only permanent water populations was undertaken at Borax Lake in sources in the Alvord Desert, which receives 1991 and 1992. Borax Lake, the only known less than 20 cm of rain annually (Green 1978; habitat for G. boraxobius, is a warm, alkaline Cobb et al. 1981). Borax Lake is the only known water body approximately 10 hectares in size habitat for Gila boraxobius, the Borax Lake with an average surface water temperature of chub, a cyprinid fish recognized as a new 30°C. Periphyton algae were surveyed by species in 1980. The chub was listed as scraping substrates and incubating microscope endangered under the Endangered Species Act slides in the water column. Invertebrates were in 1982 because it was believed that geothermal- collected using dip nets, pitfall traps and Ekman energy test-well drilling activities near Borax dredges. The aufwuchs community was Lake might jeopardize its habitat by altering the composed of 23 species and was dominated by flow or temperature of water in the lake. -

Insect Egg Size and Shape Evolve with Ecology but Not Developmental Rate Samuel H
ARTICLE https://doi.org/10.1038/s41586-019-1302-4 Insect egg size and shape evolve with ecology but not developmental rate Samuel H. Church1,4*, Seth Donoughe1,3,4, Bruno A. S. de Medeiros1 & Cassandra G. Extavour1,2* Over the course of evolution, organism size has diversified markedly. Changes in size are thought to have occurred because of developmental, morphological and/or ecological pressures. To perform phylogenetic tests of the potential effects of these pressures, here we generated a dataset of more than ten thousand descriptions of insect eggs, and combined these with genetic and life-history datasets. We show that, across eight orders of magnitude of variation in egg volume, the relationship between size and shape itself evolves, such that previously predicted global patterns of scaling do not adequately explain the diversity in egg shapes. We show that egg size is not correlated with developmental rate and that, for many insects, egg size is not correlated with adult body size. Instead, we find that the evolution of parasitoidism and aquatic oviposition help to explain the diversification in the size and shape of insect eggs. Our study suggests that where eggs are laid, rather than universal allometric constants, underlies the evolution of insect egg size and shape. Size is a fundamental factor in many biological processes. The size of an 526 families and every currently described extant hexapod order24 organism may affect interactions both with other organisms and with (Fig. 1a and Supplementary Fig. 1). We combined this dataset with the environment1,2, it scales with features of morphology and physi- backbone hexapod phylogenies25,26 that we enriched to include taxa ology3, and larger animals often have higher fitness4. -

Diving Beetle Offspring Oviposited in Amphibian Spawn Prey on the Tadpoles Upon Hatching
bioRxiv preprint doi: https://doi.org/10.1101/666008; this version posted June 10, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-ND 4.0 International license. 1 Diving beetle offspring oviposited in amphibian spawn prey on the tadpoles upon hatching John Gould1*, Jose W. Valdez2, Simon Clulow1,3, John Clulow1 1School of Environmental and Life Sciences, University of Newcastle, Callaghan, 2308 NSW, Australia 2 Department of Bioscience - Biodiversity and Conservation, Aarhus University, 8410 Rønde, Denmark 3Department of Biological Sciences, Macquarie University, Sydney, 2019 NSW, Australia * [email protected] Abstract In highly ephemeral freshwater habitats, predatory vertebrates are typically unable to become established, leaving an open niche often filled by macroinvertebrate predators. However, these predators are faced with the challenge of finding sufficient food sources as the rapid rate of desiccation prevents the establishment of extended food chains and limits the number of prey species present. It could therefore be advantageous for adults to oviposit their offspring in the presence of future prey within sites of extreme ephemerality. We report the first case of adult diving beetles ovipositing their eggs within spawn of the sandpaper frog, Lechriodus fletcheri. This behaviour was found among several pools used by L. fletcheri for reproduction. Beetle eggs oviposited in frog spawn were found to hatch within 24 hours of the surrounding L. fletcheri eggs, with the larvae becoming voracious consumers of the hatched tadpoles. -

Scientific Publications* of James P. O'connor MRIA for the Years 1977
Scientific publications* of James P. O’Connor MRIA for the years 1977-2015. Emeritus Entomologist and former Keeper of Natural History, National Museum of Ireland – Natural History, Dublin. *book reviews are not included 495. Ashe, P., O’Connor, J. P. and Murray, D. A. (2015) A review of the distribution and ecology of Buchonomyia thienemanni Fittkau (Diptera: Chironomidae) including a first record for Russia. European Journal of Environmental Sciences 5: 5-11. 496. O’Connor, J. P., Bond, K. G. M and O’Connor, M. A. (2015) Records of Potamophylax cingulatus (Stephens) and P. latipennis (Curtis) (Trichoptera: Limnephilidae) from Northern Ireland. Irish Naturalists’ Journal 34: 136-137. 497. O’Connor, J. P. and O’Connor, M. A. (2015) Three species of caddisfly (Trichoptera) new to Northern Ireland, including Apatania wallengreni McLachlan, 1871. Entomologist’s Monthly Magazine 151: 281-282. 498. Murray, D. A., Langton, P. H., O’Connor, J. P. and Ashe, P. (2014) Distribution records of Irish Chironomidae (Diptera): part 3 – Chironominae. Bulletin of the Irish Biogeographical Society 39: 7-192. 499. O’Connor, J. P. and O’Connor, M. A. (2015) Additional caddisfly (Trichoptera) records from County Fermanagh including Hydroptila cornuta and Ceraclea senilis new to Northern Ireland. Bulletin of the Irish Biogeographical Society 39: 203-208. 500. O’Connor, J. P. (2015) A catalogue and atlas of the caddisflies (Trichoptera) of Ireland. Occasional Publication of the Irish Biogeographical Society Number 11. viii + 646pp. Published by the Irish Biogeograpical Society in association with the National Museum of Ireland. List compiled 1 January 2016 and the pages are shown in reverse chronological order. -

Dinburgh Encyclopedia;
THE DINBURGH ENCYCLOPEDIA; CONDUCTED DY DAVID BREWSTER, LL.D. \<r.(l * - F. R. S. LOND. AND EDIN. AND M. It. LA. CORRESPONDING MEMBER OF THE ROYAL ACADEMY OF SCIENCES OF PARIS, AND OF THE ROYAL ACADEMY OF SCIENCES OF TRUSSLi; JIEMBER OF THE ROYAL SWEDISH ACADEMY OF SCIENCES; OF THE ROYAL SOCIETY OF SCIENCES OF DENMARK; OF THE ROYAL SOCIETY OF GOTTINGEN, AND OF THE ROYAL ACADEMY OF SCIENCES OF MODENA; HONORARY ASSOCIATE OF THE ROYAL ACADEMY OF SCIENCES OF LYONS ; ASSOCIATE OF THE SOCIETY OF CIVIL ENGINEERS; MEMBER OF THE SOCIETY OF THE AN TIQUARIES OF SCOTLAND; OF THE GEOLOGICAL SOCIETY OF LONDON, AND OF THE ASTRONOMICAL SOCIETY OF LONDON; OF THE AMERICAN ANTlftUARIAN SOCIETY; HONORARY MEMBER OF THE LITERARY AND PHILOSOPHICAL SOCIETY OF NEW YORK, OF THE HISTORICAL SOCIETY OF NEW YORK; OF THE LITERARY AND PHILOSOPHICAL SOClE'i'Y OF li riiECHT; OF THE PimOSOPHIC'.T- SOC1ETY OF CAMBRIDGE; OF THE LITERARY AND ANTIQUARIAN SOCIETY OF PERTH: OF THE NORTHERN INSTITUTION, AND OF THE ROYAL MEDICAL AND PHYSICAL SOCIETIES OF EDINBURGH ; OF THE ACADEMY OF NATURAL SCIENCES OF PHILADELPHIA ; OF THE SOCIETY OF THE FRIENDS OF NATURAL HISTORY OF BERLIN; OF THE NATURAL HISTORY SOCIETY OF FRANKFORT; OF THE PHILOSOPHICAL AND LITERARY SOCIETY OF LEEDS, OF THE ROYAL GEOLOGICAL SOCIETY OF CORNWALL, AND OF THE PHILOSOPHICAL SOCIETY OF YORK. WITH THE ASSISTANCE OF GENTLEMEN. EMINENT IN SCIENCE AND LITERATURE. IN EIGHTEEN VOLUMES. VOLUME VII. EDINBURGH: PRINTED FOR WILLIAM BLACKWOOD; AND JOHN WAUGH, EDINBURGH; JOHN MURRAY; BALDWIN & CRADOCK J. M. RICHARDSON, LONDON 5 AND THE OTHER PROPRIETORS. M.DCCC.XXX.- . -

The Water Beetles of Maine: Including the Families Gyrinidae, Haliplidae, Dytiscidae, Noteridae, and Hydrophilidae
The University of Maine DigitalCommons@UMaine Technical Bulletins Maine Agricultural and Forest Experiment Station 9-1-1971 TB48: The aW ter Beetles of Maine: Including the Families Gyrididae, Haliplidae, Dytiscidae, Noteridae, and Hydrophilidae Stanley E. Malcolm Follow this and additional works at: https://digitalcommons.library.umaine.edu/aes_techbulletin Part of the Entomology Commons Recommended Citation Malcolm, S.E. 1971. The aw ter beetles of Maine: Including the families Gyrinidae, Haliplidae, Dytiscidea, Noteridae, and Hydrophilidae. Life Sciences and Agriculture Experiment Station Technical Bulletin 48. This Article is brought to you for free and open access by DigitalCommons@UMaine. It has been accepted for inclusion in Technical Bulletins by an authorized administrator of DigitalCommons@UMaine. For more information, please contact [email protected]. THE WATER BEETLES OF MAINE: INCLUDING THE FAMILIES GYRINIDAE, HALIPLIDAE, DYTISCIDAE, NOTERIDAE, AND HYDROPHILIDAE STANLEY E. MALCOLM TECHNICAL BULLETIN 48 SEPTEMBER 1971 LIFE SCIENCES AND AGRICULTURE EXPERIMENT STATION UNIVERSITY OF MAINE AT ORONO ACKNOWLEDGMENTS To my wife, Joann, whose patience and hard work have contributed so much, I dedicate this work. I am deeply indebted to Dr. David C. Miller, Dr. Paul J. Spangler, Mr. Brian S. Cheary, and Mr. Lee Hellman for their advice on particular taxonomic problems. I am further indebted to the chairman of my graduate committee, Dr. John B. Dimond, and the members of my com mittee, Dr. Richard Storch and Dr. Richard Hatch, who have at all times been willing to advise me. Finally, I must thank all the members of the Entomology Department for their interest in my work and for their constructive criticism. -

Water Beetles by Richard Chadd, Kevin Rowley & Henry Stanier What? Water Beetles Are Insects Belonging to the Order Coleoptera Great Diving Beetle Dytiscus Marginalis
Monitoring & Research Ecology Groups Wildlife Profiles: Water Beetles By Richard Chadd, Kevin Rowley & Henry Stanier What? Water beetles are insects belonging to the Order Coleoptera Great Diving Beetle Dytiscus marginalis. which means ‘sheathed wings’ as the wings are covered by hard Photo by Kim Taylor wing cases (elytra). The order is huge and includes a wide variety of groups, some of which have a close association with water, living on or in it for most of their adult life. These have representatives from two main Sub-orders, Adephaga (the water beetles in this group are often referred to as Hydradephaga) and Polyphaga. The Hydradephaga are more your typical diving beetles, include 5 families, and are purely aquatic. The Polyphaga are more loosely associated with water and usually termed scavenger water beetles. They include 9 families but study is usually limited to the 6 that are more commonly aquatic or semi-aquatic as adults. All species are adapted in some way to an aquatic lifestyle, often flattened and oval in outline, with their 6 limbs modified to varying extents, to enhance their swimming or submerged crawling ability. Their wing cases meet in a straight line down the centre of the back, unlike bugs, and are modified to not only create an efficient suit of armour but also to store air like an aqualung. They can spend prolonged periods underwater but still have to return to the surface to breathe and restore their air supply, though some, the polyphagous Elmidae, can use the bubble as a rudimentary ‘lung’ and stay submerged more-or-less permanently. -

Appendix I Accepted ECOTOX Data Table and Bibliography
APPENDIX I: Accepted ECOTOX Data Table and Bibliography Malathion The code list for ECOTOX can be found at: http://cfpub.epa.gov/ecotox/blackbox/help/codelist.pdf Chemical Genus Species Common Name Effect Group Effect Meas Endpt 1 Endpt 2 Op Duration Dur Unit Op Conc Value 1 Op Conc Value 2 Conc Units Ref # Malathion Pseudorasbora parva Motsuga, stone moroko ACC GACC BCF 3 d 1.2 mg/L 2164 Malathion Triaenodes sp Caddis fly ACC ACC RSDE BCF 5 d 0.1 mg/L 2340 Malathion Bellamya bengalensis Snail ACC ACC RSDE LOAEL 5 d 1.5 ml/L 90666 Malathion Cyprinus carpio common carp ACC ACC RSDE BCF 28 d 0.114 mg/L 89874 Malathion Tilapia nilotica Nile tilapia ACC ACC RSDE BCF 28 d 0.3 mg/L 89874 Malathion Spirodela oligorhiza Big duckweed ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Myriophyllum aquaticum Parrot feather watermilfoil ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Elodea canadensis Waterweed ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Stagnicola sp. Snail ACC ACC RSDE BCF 1.5 d 60 mg/L 67329 Malathion Pseudorasbora parva Motsuga, stone moroko ACC GACC BCF 3 d 1.2 mg/L 2164 Malathion Triaenodes sp Caddis fly ACC ACC RSDE BCF 5 d 0.1 mg/L 2340 Malathion Bellamya bengalensis Snail ACC ACC RSDE LOAEL 5 d 1.5 ml/L 90666 Malathion Cyprinus carpio common carp ACC ACC RSDE BCF 28 d 0.114 mg/L 89874 Malathion Tilapia nilotica Nile tilapia ACC ACC RSDE BCF 28 d 0.3 mg/L 89874 Malathion Spirodela oligorhiza Big duckweed ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Myriophyllum aquaticum Parrot feather watermilfoil ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Elodea canadensis Waterweed ACC ACC RSDE BCF 8 d 50 ppm 68281 Malathion Stagnicola sp. -

Dytiscuskey3s Adrian Chalkley.Pdf
Written by Adrian Chalkley County Recorder Freshwater Invertebrates Find me onTwitter at https://twitter.com/Box_Valley www.sns.org.uk Suffolk records to [email protected] It is generally known that Great Diving Beetles are some of our largest freshwater insects and most naturalists will know the name Dytiscus marginalis, but there are in fact 6 species of Dytiscusin Britain and Ireland as well as two other beetles which can potentially be confused with them. The object of this photo guide is to explain that confusion and allow accurate identification so that the average naturalist can record them. Identification can be done with or without a simple hand lens & even from photographs taken in the field if you haven’t got this key with you. One word of warning however the photos here were taken from preserved specimens and the yellow colours mentioned below have darkened over time. In the field they will appear brighter. Great diving beetles often appear attracted to light and may be found in moth traps; confused by the polarization of light reflected from the laminated windscreens of cars they are sometimes found after crashing into parked cars. Of course, since they are good fliers, they may well visit even small garden ponds at least for a short visit before flying off again. Of course if you have a pond net and spend time investigating a larger pond or lake that you own, or maybe at a nature reserve where you volunteer then you may well find one of the species below in your net.