Dragonfly Locomotion: Ecology, Form and Function
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Water Beetles
Ireland Red List No. 1 Water beetles Ireland Red List No. 1: Water beetles G.N. Foster1, B.H. Nelson2 & Á. O Connor3 1 3 Eglinton Terrace, Ayr KA7 1JJ 2 Department of Natural Sciences, National Museums Northern Ireland 3 National Parks & Wildlife Service, Department of Environment, Heritage & Local Government Citation: Foster, G. N., Nelson, B. H. & O Connor, Á. (2009) Ireland Red List No. 1 – Water beetles. National Parks and Wildlife Service, Department of Environment, Heritage and Local Government, Dublin, Ireland. Cover images from top: Dryops similaris (© Roy Anderson); Gyrinus urinator, Hygrotus decoratus, Berosus signaticollis & Platambus maculatus (all © Jonty Denton) Ireland Red List Series Editors: N. Kingston & F. Marnell © National Parks and Wildlife Service 2009 ISSN 2009‐2016 Red list of Irish Water beetles 2009 ____________________________ CONTENTS ACKNOWLEDGEMENTS .................................................................................................................................... 1 EXECUTIVE SUMMARY...................................................................................................................................... 2 INTRODUCTION................................................................................................................................................ 3 NOMENCLATURE AND THE IRISH CHECKLIST................................................................................................ 3 COVERAGE ....................................................................................................................................................... -

Dragonfly News 66
Dragonfly News 66 The Magazine of the British Dragonfly Society Autumn 2014 www.british-dragonflies.org.uk Meet the new BDS Chairman, How many Willow Emeralds are David Chelmick ovipositing? Dragonfly hunting....in Sweden? Andy Holt’s unique larval portraits How tatty can a dragonfly be and still fly? Dragonfly News 66 The Magazine of the British Dragonfly Society Published twice a year, in April and October, Dragonfly News covers all aspects of the British Dragonfly Society’s field, recording, monitoring, research, conservation and social activities, as well as information from the wider dragonfly, natural history and conservation world. The emphasis is on dragonflies recorded in the UK. The British Dragonfly Society aims to promote and encourage the study, conservation and understanding of dragonflies and their natural habitats, especially in the UK, and to raise public awareness of dragonflies. Dragonfly News is edited & designed by: Trustees & Officers of the BDS Mark Tyrrell, 8 Warwick Close, Raunds, Chairman: David Chelmick Northants., NN9 6JH Tel. Vice-Chairman: Vacant e-mail: Secretary: Henry Curry, 23 Bowker Way, Whittlesey, Peterborough, PE7 1PY. Tel. Deadlines for inclusion of copy: Spring 31 January Treasurer: Brian Walker, 49 Roman Way, Wantage, Autumn 31 July Oxfordshire, OX12 9YF. Tel. Advertising Rates: Trustees: David Goddard, Stuart Irons, Mick Parfitt. £15 for small-ad (text only); £40 for quarter- Journal Editor: Peter Mill, 8 Cookridge Grove, LEEDS, page; £60 for half-page; £100 for full-page. LS16 7LH. Shop Manager: Lynn Curry, 23 Bowker Way, Whittlesey, Peterborough, PE7 1PY Tel. © British Dragonfly Society 2014 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted, in any Dragonfly Conservation Group (DCG) form or by any means, electronic, mechanical, photocopying, Convenor: Dave Smallshire, 8, Twindle Beer, Chudleigh, Newton recording or otherwise, without the permission of the British Abbot, Devon, TQ13 0JP. -
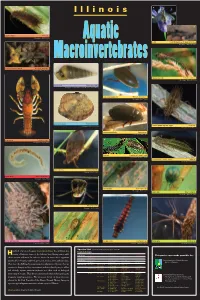
Hundreds of Species of Aquatic Macroinvertebrates Live in Illinois In
Illinois A B aquatic sowbug Asellus sp. Photograph © Paul P.Tinerella AAqquuaattiicc mayfly A. adult Hexagenia sp.; B. nymph Isonychia sp. MMaaccrrooiinnvveerrtteebbrraatteess Photographs © Michael R. Jeffords northern clearwater crayfish Orconectes propinquus Photograph © Michael R. Jeffords ruby spot damselfly Hetaerina americana Photograph © Michael R. Jeffords aquatic snail Pleurocera acutum Photograph © Jochen Gerber,The Field Museum of Natural History predaceous diving beetle Dytiscus circumcinctus Photograph © Paul P.Tinerella monkeyface mussel Quadrula metanevra common skimmer dragonfly - nymph Libellula sp. Photograph © Kevin S. Cummings Photograph © Paul P.Tinerella water scavenger beetle Hydrochara sp. Photograph © Steve J.Taylor devil crayfish Cambarus diogenes A B Photograph © ChristopherTaylor dobsonfly Corydalus sp. A. larva; B. adult Photographs © Michael R. Jeffords common darner dragonfly - nymph Aeshna sp. Photograph © Paul P.Tinerella giant water bug Belostoma lutarium Photograph © Paul P.Tinerella aquatic worm Slavina appendiculata Photograph © Mark J. Wetzel water boatman Trichocorixa calva Photograph © Paul P.Tinerella aquatic mite Order Prostigmata Photograph © Michael R. Jeffords backswimmer Notonecta irrorata Photograph © Paul P.Tinerella leech - adult and young Class Hirudinea pygmy backswimmer Neoplea striola mosquito - larva Toxorhynchites sp. fishing spider Dolomedes sp. Photograph © William N. Roston Photograph © Paul P.Tinerella Photograph © Michael R. Jeffords Photograph © Paul P.Tinerella Species List Species are not shown in proportion to actual size. undreds of species of aquatic macroinvertebrates live in Illinois in a Kingdom Animalia Hvariety of habitats. Some of the habitats have flowing water while Phylum Annelida Class Clitellata Family Naididae aquatic worm Slavina appendiculata This poster was made possible by: others contain still water. In order to survive in water, these organisms Class Hirudinea leech must be able to breathe, find food, protect themselves, move and reproduce. -

Stable Structural Color Patterns Displayed on Transparent Insect Wings
Stable structural color patterns displayed on transparent insect wings Ekaterina Shevtsovaa,1, Christer Hanssona,b,1, Daniel H. Janzenc,1, and Jostein Kjærandsend,1 aDepartment of Biology, Lund University, Sölvegatan 35, SE-22362 Lund, Sweden; bScientific Associate of the Entomology Department, Natural History Museum, London SW7 5BD, United Kingdom; cDepartment of Biology, University of Pennsylvania, Philadelphia, PA 19104-6018; and dDepartment of Biology, Museum of Zoology, Lund University, Helgonavägen 3, SE-22362 Lund, Sweden Contributed by Daniel H. Janzen, November 24, 2010 (sent for review October 5, 2010) Color patterns play central roles in the behavior of insects, and are and F). In laboratory conditions most wings are studied against a important traits for taxonomic studies. Here we report striking and white background (Fig. 1 G, H, and J), or the wings are embedded stable structural color patterns—wing interference patterns (WIPs) in a medium with a refractive index close to that of chitin (e.g., —in the transparent wings of small Hymenoptera and Diptera, ref. 19). In both cases the color reflections will be faint or in- patterns that have been largely overlooked by biologists. These ex- visible. tremely thin wings reflect vivid color patterns caused by thin film Insects are an exceedingly diverse and ancient group and interference. The visibility of these patterns is affected by the way their signal-receiver architecture of thin membranous wings the insects display their wings against various backgrounds with and color vision was apparently in place before their huge radia- different light properties. The specific color sequence displayed tion (20–22). The evolution of functional wings (Pterygota) that lacks pure red and matches the color vision of most insects, strongly can be freely operated in multidirections (Neoptera), coupled suggesting that the biological significance of WIPs lies in visual with small body size, has long been viewed as associated with their signaling. -

Consequences of Evolutionary Transitions in Changing Photic Environments
bs_bs_banner Austral Entomology (2017) 56,23–46 Review Consequences of evolutionary transitions in changing photic environments Simon M Tierney,1* Markus Friedrich,2,3 William F Humphreys,1,4,5 Therésa M Jones,6 Eric J Warrant7 and William T Wcislo8 1School of Biological Sciences, The University of Adelaide, North Terrace, Adelaide, SA 5005, Australia. 2Department of Biological Sciences, Wayne State University, 5047 Gullen Mall, Detroit, MI 48202, USA. 3Department of Anatomy and Cell Biology, Wayne State University, School of Medicine, 540 East Canfield Avenue, Detroit, MI 48201, USA. 4Terrestrial Zoology, Western Australian Museum, Locked Bag 49, Welshpool DC, WA 6986, Australia. 5School of Animal Biology, University of Western Australia, Nedlands, WA 6907, Australia. 6Department of Zoology, The University of Melbourne, Melbourne, Vic. 3010, Australia. 7Department of Biology, Lund University, Sölvegatan 35, S-22362 Lund, Sweden. 8Smithsonian Tropical Research Institute, PO Box 0843-03092, Balboa, Ancón, Republic of Panamá. Abstract Light represents one of the most reliable environmental cues in the biological world. In this review we focus on the evolutionary consequences to changes in organismal photic environments, with a specific focus on the class Insecta. Particular emphasis is placed on transitional forms that can be used to track the evolution from (1) diurnal to nocturnal (dim-light) or (2) surface to subterranean (aphotic) environments, as well as (3) the ecological encroachment of anthropomorphic light on nocturnal habitats (artificial light at night). We explore the influence of the light environment in an integrated manner, highlighting the connections between phenotypic adaptations (behaviour, morphology, neurology and endocrinology), molecular genetics and their combined influence on organismal fitness. -

Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae
Eastern Illinois University The Keep Masters Theses Student Theses & Publications 1986 Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) and Two Anuran Tadpole Species (Bufo americanus and Hyla crucifer) Todd S. Campbell Eastern Illinois University This research is a product of the graduate program in Zoology at Eastern Illinois University. Find out more about the program. Recommended Citation Campbell, Todd S., "Factors Affecting the Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) and Two Anuran Tadpole Species (Bufo americanus and Hyla crucifer)" (1986). Masters Theses. 2728. https://thekeep.eiu.edu/theses/2728 This is brought to you for free and open access by the Student Theses & Publications at The Keep. It has been accepted for inclusion in Masters Theses by an authorized administrator of The Keep. For more information, please contact [email protected]. THESIS REPRODUCTION CERTIFICATE TO: Graduate Degree Candidates who have written formal theses. SUBJECT: Permission to reproduce theses. The University Library is rece1vmg a number of requests from other institutions asking permission to reproduce dissertations for inclusion in their library holdings. Although no copyright laws are involved, we feel that professional courtesy demands that permission be obtained from the author before we allow theses to be copied. Please sign one of the following statements: Booth Library of Eastern Illinois University has my permission to lend my thesis to a reputable college or university for the purpose of copying it for inclusion in that instituHon' s library or research holdings. Date Author I respectfully request Booth Library of Eastern Illinois University not allow my thesis be reproduced because ��-�� Date Author m Factors Affecting The Predator-Prey Relationship Between Predaceous Diving Beetle Larvae (Dytiscus fasciventris) And Two Anuran Tadpole Species (Bufo americanus and Hyl a crucifer) . -

Algae and Invertebrates of a Great Basin Desert Hot Lake: a Description of the Borax Lake Ecosystem of Southeastern Oregon
Conference Proceedings. Spring-fed Wetlands: Important Scientific and Cultural Resources of the Intermountain Region, 2002. http://www.wetlands.dri.edu Algae and Invertebrates of a Great Basin Desert Hot Lake: A description of the Borax Lake ecosystem of southeastern Oregon Joseph Furnish Pacific Southwest Region 5, U.S. Department of Agriculture, Forest Service, Vallejo, CA [email protected] James McIver Pacific Northwest Research Station, U.S. Department of Agriculture, Forest Service, LaGrande, OR Mark Teiser Department of Oceanography, Oregon State University, Corvallis, OR Abstract Introduction As part of the recovery plan for the Borax Lake is a geothermally heated endangered chub Gila boraxobius (Cyprinidae), alkaline lake in southeastern Oregon. It a description of algal and invertebrate represents one of the only permanent water populations was undertaken at Borax Lake in sources in the Alvord Desert, which receives 1991 and 1992. Borax Lake, the only known less than 20 cm of rain annually (Green 1978; habitat for G. boraxobius, is a warm, alkaline Cobb et al. 1981). Borax Lake is the only known water body approximately 10 hectares in size habitat for Gila boraxobius, the Borax Lake with an average surface water temperature of chub, a cyprinid fish recognized as a new 30°C. Periphyton algae were surveyed by species in 1980. The chub was listed as scraping substrates and incubating microscope endangered under the Endangered Species Act slides in the water column. Invertebrates were in 1982 because it was believed that geothermal- collected using dip nets, pitfall traps and Ekman energy test-well drilling activities near Borax dredges. The aufwuchs community was Lake might jeopardize its habitat by altering the composed of 23 species and was dominated by flow or temperature of water in the lake. -

Index to Contents
Index to Contents Author(s) Title Year Vol Pages Holland, Sonia Dragonfly Survey Reports – 1. Gloucestershire 1983 1 (1) 1-3 Butler, Stephen Notes on finding larvae of Somatochlora arctica (Zetterstedt) in N. W. Scotland 1983 1 (1) 4-5 Winsland, David Some observations on Erythromma najas (Hansemann) 1983 1 (1) 6 Merritt, R. Is Sympetrum nigrescens Lucas a good species? 1983 1 (1) 7-8 Vick, G. S. Is Sympetrum nigrescens Lucas a good species? 1983 1 (1) 7-8 Merritt, R. Coenagrion mercuriale (Charpentier) with notes on habitat 1983 1 (1) 9-12 Chelmick, D. G. Observations on the ecology and distribution of Oxygastra curtisii (Dale) 1983 1 (2) 11-14 Khan, R. J. Observations of Wood-mice (Apodemus sylvaticus) and Hobby (Falco subbuteo) feeding on dragonflies 1983 1 (2) 15 Marren, P. R. Scarce Species Status Report 2. A review of Coenagrion hastulatum (Charpentier) in Britain 1983 1 (2) 16-19 Merritt, R. Is Sympetrum nigrescens Lucas a good species? 1983 1 (2) 16-19 Mayo, M. C. A. Coenagrion mercuriale (Charpentier) on the flood plains of the River Itchen and River Test in Hampshire 1983 1 (2) 20-21 Welstead, A. R. Coenagrion mercuriale (Charpentier) on the flood plains of the River Itchen and river Test in Hampshire 1983 1 (2) 20-21 Kemp, R. G. Notes and observations on Gomphus vulgatissimus (Linnaeus) on the river Severn and River Thames 1983 1 (2) 22-25 Vick, G. S. Notes and observations on Gomphus vulgatissimus (Linnaeus) on the river Severn and River Thames 1983 1 (2) 22-25 Corbet, P. -

Diversity of Predatory Arthropods in Bt and Non-Bt Cotton Fields Of
Journal of Entomology and Zoology Studies 2021; 9(2): 1199-1203 E-ISSN: 2320-7078 P-ISSN: 2349-6800 Diversity of predatory arthropods in Bt and non- www.entomoljournal.com JEZS 2021; 9(2): 1199-1203 Bt cotton fields of Nalgonda district, Telangana © 2021 JEZS Received: 22-01-2021 state, India Accepted: 24-02-2021 Modala Mallesh Environmental Biology Lab, Modala Mallesh and Ch. Sravanthy Department of Zoology, Kakatiya University, Warangal, Telangana, India Abstract The study was conducted to investigate diversity of predatory arthropods (Predatory insects and Spiders) Ch. Sravanthy Environmental Biology Lab, in Bt cotton and non-Bt cotton fields during July 2018 to January 2019 at farmers field of Palem Village, Department of Zoology, Kakatiya Nalgonda District, T.S, India. A total 4768 individual arthropods on Bt cotton, 5232 individual University, Warangal, Telangana, arthropods on non-Bt cotton fields were collected with the help of sweep net and hand picking. The India predatory arthropods were identified with the help of Guide on cotton pests and predators, Regional Agricultural Research Station PJTSAU Warangal and literature. Eleven predatory insects and two spiders in Bt cotton and thirteen predatory insects and three spiders in non-Bt cotton were recorded. The results indicated that minor differences found between the Bt and non-Bt cotton fields. Our findings conclude that Bt cotton may affect predatory arthropods indirectly through removal of eggs, larvae and pupa of insect pests that serve as food for predatory arthropods. Various diversity indices were measured. Keywords: Bt cotton, non-Bt cotton, predatory arthropods, ecological indexes and seasonal abundance Introduction Cotton, Gossypium hirsutum L., belonging to Family Malvaceae; Order Malvales is one of the most important commercial crop, playing a key role in economic, political and social affairs of the world. -

Report on a Survey of Dragonflies and Damselflies on the River Kird 2017
Report on a survey of Dragonflies and Damselflies on the River Kird 2017 By Dr Alison Barker F.R.E.S. April 2018 Newly emerged Scarce Chaser Dragonfly on the River Kird in May © A.M. Barker 1 Contents Summary Page 3 Introduction Page 3 Introduction to British Dragonflies and Damselflies Page 3 Survey scope and methodology Page 5 Potential limitations Page 7 Water testing Page 7 Site descriptions Page 8 Map (Figure 9) Page 9 Results Page 19 Species recorded Page 19 Site-by-site observations Page 20 Analysis and Discussion Page 30 The Lower Kird as a habitat for Damselflies and Dragonflies. Page 30 Odonata of the River Kird in the context of the Upper Arun S.S.S.I. Page 34 Water quality and Odonata on the River Kird Page 36 Conservation of the River Kird for Dragonflies and Damselflies- Page 37 Trees Page 37 Vegetation and bank structure Page 38 Management of the surrounding habitat Page 39 River habitat diversity and river management Page 39 Invasive species Page 40 Conclusions Page 40 Acknowledgements Page 41 Glossary Page 41 References Page 43 Appendix 1 Table showing all species recorded by site and visit page 46 2 Summary The River Kird is a feeder stream for the River Arun in the Upper Arun Site of Special Scientific Interest (S.S.S.I.) area. Although the latter is designated principally on the richness of its dragonfly and damselfly fauna; the River Kird has not been systematically surveyed for these insects. In the summer of 2017 we were able to survey over 5km of the lower reaches of the River Kird, from Kirdford to the point where it reaches the River Arun. -

Insect Egg Size and Shape Evolve with Ecology but Not Developmental Rate Samuel H
ARTICLE https://doi.org/10.1038/s41586-019-1302-4 Insect egg size and shape evolve with ecology but not developmental rate Samuel H. Church1,4*, Seth Donoughe1,3,4, Bruno A. S. de Medeiros1 & Cassandra G. Extavour1,2* Over the course of evolution, organism size has diversified markedly. Changes in size are thought to have occurred because of developmental, morphological and/or ecological pressures. To perform phylogenetic tests of the potential effects of these pressures, here we generated a dataset of more than ten thousand descriptions of insect eggs, and combined these with genetic and life-history datasets. We show that, across eight orders of magnitude of variation in egg volume, the relationship between size and shape itself evolves, such that previously predicted global patterns of scaling do not adequately explain the diversity in egg shapes. We show that egg size is not correlated with developmental rate and that, for many insects, egg size is not correlated with adult body size. Instead, we find that the evolution of parasitoidism and aquatic oviposition help to explain the diversification in the size and shape of insect eggs. Our study suggests that where eggs are laid, rather than universal allometric constants, underlies the evolution of insect egg size and shape. Size is a fundamental factor in many biological processes. The size of an 526 families and every currently described extant hexapod order24 organism may affect interactions both with other organisms and with (Fig. 1a and Supplementary Fig. 1). We combined this dataset with the environment1,2, it scales with features of morphology and physi- backbone hexapod phylogenies25,26 that we enriched to include taxa ology3, and larger animals often have higher fitness4. -

The Development of a Miniature Mechanism for Producing Insect Wing Motion
The development of a miniature mechanism for producing insect wing motion S. C. Burgess, K. Alemzadeh & L. Zhang Department of Mechanical Engineering, Bristol University, Bristol, UK Abstract Insects are capable of very agile flight on a small scale. If a man-made machine can be built that can fly like an insect, it would have important industrial, civil and military applications. Insects have complex wing motions including non- planar wing strokes and stroke reversal. This paper presents the design of a novel mechanism which can produce insect type wing motion. The mechanism is very light and compact and has potential for use in micro air vehicles. A prototype has been built and some preliminary tests have been carried out to characterize the mechanism performance. Keywords: insect flight, wing motion, novel mechanisms, wing reversal, lift. 1 Introduction The ability for controlled flight has existed in at least four classes of creature: (1) birds; (2) mammals (bats); (3) reptiles (pterosaurs); and (4) insects. Pterosaurs are believed to have been the largest fliers with wingspans up to 12m. It is thought that pterosaurs were capable of flapping flight because fossil records show a similar type of shoulder joint to that found in birds. Birds currently have a large range of size from the large albatross with a wingspan of up to 3.5m, to the tiny bumble hummingbird which has a span of only 8cm. Most birds can perform flapping flight but not true hovering flight. However, hummingbirds have a flexible shoulder joint which enables them to hover in windless conditions. Bats have a relatively small range of size.