Technical Summaries
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Digital Display Circuits This Worksheet and All Related Files Are Licensed Under the Creative Commons Attribution License, Versi
Digital display circuits This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/, or send a letter to Creative Commons, 559 Nathan Abbott Way, Stanford, California 94305, USA. The terms and conditions of this license allow for free copying, distribution, and/or modification of all licensed works by the general public. Resources and methods for learning about these subjects (list a few here, in preparation for your research): 1 Questions Question 1 What is the purpose of a seven-segment decoder circuit? What is a ”seven-segment” display, and why do we need a decoder circuit to drive it? Research the part number for a typical seven-segment decoder circuit (either CMOS or TTL). file 01417 Question 2 A seven segment decoder is a digital circuit designed to drive a very common type of digital display device: a set of LED (or LCD) segments that render numerals 0 through 9 at the command of a four-bit code: Display driver IC Seven-segment display VDD a a . A b . f b c . g Inputs B d . C e . f . D g . e c d The behavior of the display driver IC may be represented by a truth table with seven outputs: one for each segment of the seven-segment display (a through g). In the following table, a ”1” output represents an active display segment, while a ”0” output represents an inactive segment: D C B A a b c d e f g Display 0 0 0 0 1 1 1 1 1 1 0 ”0” 0 0 0 1 0 1 1 0 0 0 0 ”1” 0 0 1 0 1 1 0 1 1 0 1 ”2” 0 0 1 1 1 1 1 1 0 0 1 ”3” 0 1 0 0 0 1 1 0 0 1 1 ”4” 0 1 0 1 1 0 1 1 0 1 1 ”5” 0 1 1 0 1 0 1 1 1 1 1 ”6” 0 1 1 1 1 1 1 0 0 0 0 ”7” 1 0 0 0 1 1 1 1 1 1 1 ”8” 1 0 0 1 1 1 1 1 0 1 1 ”9” Write the unsimplified SOP or POS expressions (choose the most appropriate form) for outputs a, b, c, and e. -

Symposium Digest Articles Listed Chronologically 1963-1988
Preliminary Table of Contents for SID Symposium Digests 1963-1988 ( author company affiliations not listed) Notes: 1 The index covers full papers and keynote speeches for SID Symposia from 1963 through 1988; panel sessions, seminars and luncheon speakers are not listed 2 Authors' company affiliations are not shown (to be added) 3 Lead author is designated with asterisk ( * ) 4 The first ten (10) digests were designated by number as follows 5 The first ten (10 Symposia were identified by numbers, as follows: 2/1963 -#1; 9/63 - #2; 5/64-#3; 9/64 - #4; 2/65 - #5; 9/65 - #6; 10/66 - #7; 5/67 - #8; 5/68 - #9; 5/69 - #10 Session # Year Page Title Author(s) 1963-1 1 User Requirements for Display Debons, Col, Anthony * 1963-1 13 Scan Conversion and Bright Display Porter, Richard * 1963-1 21 Multicolor Projection System Smith, Fred E.* 1963-1 31 Advanced Display Techniques through the Charactron Redman, James H.* 1963-1 53 Light Valve Display Albanese, Augustine * 1963-1 63 Colordata, A Photographic Large Screen Display system Baron, Peter C.* 1963-1 77 Human Performance Engineering and Information Display Silvern, Leonard * 1963-1 83 Multiple Projection Techniques Klein, R.C.* 1963-1 93 Photochromic Dynamic Display Hines, Logan J.* 1963-1 99 Datachrome Display System Parker, Philip A.* 1963-1 117 High Ambient Light Display Systems Miller, Wendell S.* 1963-1 127 Electroluminescent Displays Hallett, Joseph L.* 1963-1 139 Pseudo 3-D Display Perdue, Joseph L.* 1963-1 155 Aims and Purposes of the S.I.D. Vlahos, Petro * 1963-2 1 Iinformation Systems, -
Organic Light-Emitting Diode (Oled) Display Panel, Oled Display Device and Method for Driving the Same
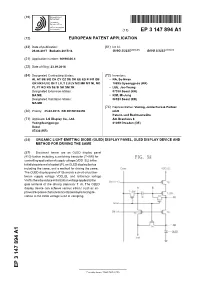
(19) TZZ¥__T (11) EP 3 147 894 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 29.03.2017 Bulletin 2017/13 G09G 3/3225 (2016.01) G09G 3/3233 (2016.01) (21) Application number: 16190336.4 (22) Date of filing: 23.09.2016 (84) Designated Contracting States: (72) Inventors: AL AT BE BG CH CY CZ DE DK EE ES FI FR GB • NA, Se-Hwan GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO 10895 Gyeonggi-do (KR) PL PT RO RS SE SI SK SM TR • LEE, Jae-Young Designated Extension States: 07350 Seoul (KR) BA ME • KIM, Mi-Jung Designated Validation States: 06923 Seoul (KR) MA MD (74) Representative: Viering, Jentschura & Partner (30) Priority: 25.09.2015 KR 20150136459 mbB Patent- und Rechtsanwälte (71) Applicant: LG Display Co., Ltd. Am Brauhaus 8 Yeongdeungpo-gu 01099 Dresden (DE) Seoul 07336 (KR) (54) ORGANIC LIGHT-EMITTING DIODE (OLED) DISPLAY PANEL, OLED DISPLAY DEVICE AND METHOD FOR DRIVING THE SAME (57) Disclosed herein are an OLED display panel (410) further including a switching transistor (T-SW) for controlling application of supply voltage (VDD_EL) in the initializing interval of a pixel (P), an OLED display device including the same, and a method for driving the same. The OLED display panel (410) avoids a short-circuit be- tween supply voltage VDD_EL and reference voltage Vref to thereby reduce initialization voltage applied to the gate terminal of the driving transistor T_dr. The OLED display device can achieve various effects such as im- proved response characteristics of pixels by reducing de- viation in the initial voltage used in sampling. -

Virtual Reality and Augmented Reality a Survey from Scania’S Perspective
EXAMENSARBETE INOM MASKINTEKNIK, AVANCERAD NIVÅ, 30 HP STOCKHOLM, SVERIGE 2019 Virtual Reality and Augmented Reality A Survey from Scania’s Perspective KARL INGERSTAM KTH SKOLAN FÖR INDUSTRIELL TEKNIK OCH MANAGEMENT Virtual Reality and Augmented Reality A Survey from Scania’s Perspective Karl Ingerstam 2019 Master of Science Thesis TPRMM 2019 KTH – Industrial Engineering and Management Production Engineering SE-100 44 Stockholm Abstract Virtual reality and augmented reality are technological fields that have developed and expanded at a great pace the last few years. A virtual reality is a digitally created environment where computer- generated elements are displayed to a user via different interfaces for the respective senses. Video is used for displaying images, creating a realistic environment, while audio is played to stimulate hearing and other sorts of feedback is used to stimulate the sense of touch in particular. Augmented reality is a sub-category of virtual reality where the user sees the real surroundings, but computer-generated imagery is displayed on top of objects in the environment. This type of technology brings a lot of new possibilities and potential use cases in all sorts of areas, ranging from personal entertainment, communication and education to medicine and heavy industry. Scania is a global manufacturer of heavy trucks and buses, and provider of related services, based in Sweden. By studying Scania’s different departments and surveying the fields of virtual reality and augmented reality, the aim of this thesis is to identify situations and use cases where there is potential for Scania to implement virtual reality and augmented reality technology. This thesis also studies what obstacles implementation of these technologies bring. -
What Is LCD (Liquid Crystal Display)?
UNIT - IV DISPLAY DEVICES SPH 1102- PHYSICS OF ELECTRON DEVICES TOPICS COVERED: Introduction - what is display devices? - Luminescence - Electroluminescence Active Display Devices - CRT – Cathode Ray Tube - LED – Light Emitting Diode Passive Display Devices - LCD – Liquid Crystal Display - Plasma Display - Dynamic Scattering Display - Touch screen INTRODUCTION Definition: - A display device is an output device for presentation of information in visual or tactile form (the latter used for example in tactile electronic displays for blind people). When the input information is supplied as an electrical signal, the display is called an electronic display. - Display devices are used for the visual presentation of information. Types of display devices: Electronic display devices based on various principles were developed. - Active display devices are based on luminescence. - Passive display devices reflect or modulate light LUMINESCENCE Definition: Luminescence is the general term used to describe the emission of electromagnetic radiation from a substance due to a non-thermal process. Luminescence occurs from a solid when it is supplied with some form of energy. Types of Luminescence: - Photoluminescence arises as a result of absorption of photons. - Fluorescence persists for a short lifetime of the transition between the two energy levels. - Phosphorescence persists for much longer time (more than 10-8 s). -Cathodoluminescence - Excitation of electrons by bombardment with a beam of electrons. -Electroluminescence - Excitation of electrons by application of an electric field. - Thermoluminescence – Excitation of electrons by the application of High temperature. - Chemiluminescence - Excitation of electrons due to chemical reaction. Active Display Devices Electronic visual displays present visual information according to the electrical input signal (analog or digital) by emitting light, they are called active displays. -

A Low Cost Holographic Display
A Low Cost Holographic Display Mark Green University of Ontario Institute of Technology Figure 1: (a) Prototype holographic display (left), (b) Image of wireframe truncated pyramid as displayed in the prototype display Abstract 1 Introduction Holography can be viewed as the ultimate display technology since In many ways holography is the ultimate display device capturing it correctly duplicates all the cues used by our visual system. In the all aspects of the light energy that is reflected or emitted by the graphics community this technology has largely been ignored in the environment. This includes all the cues that our visual system past due to its computational cost, but this is changing as more expects. This differs from other display technologies, such as head powerful parallel processors are becoming available. One of the mounted displays (HMDs) that present conflicting cues to the main challenges in this area is the lack of a commercially available viewer. In the case of an HMD the images are displayed on a fixed display device at a reasonable cost that can be used for testing and plane producing focus and accommodation cues suggesting that all evaluating algorithms. This paper describes a low cost holographic the objects are at the same depth, while the stereo and projection display device that can easily be constructed from standard parts as cues suggest they are at different depths. This causes fatigue and a solution to this problem. This paper discusses the design other visual problems. Light field displays are a step forward, but considerations for such a device, its construction and an overview only provide correct 3D cues over a limited depth range of how holograms can be computed for it. -

Evaluating Speech-To-Text Systems and AR-Glasses a Study to Develop a Potential Assistive Device for People with Hearing Impairments
UPTEC STS 21009 Examensarbete 30 hp Februari 2021 Evaluating Speech-to-Text Systems and AR-glasses A study to develop a potential assistive device for people with hearing impairments Siri Eksvärd Julia Falk Abstract Evaluating Speech-to-Text Systems and AR-glasses Siri Eksvärd and Julia Falk Teknisk- naturvetenskaplig fakultet UTH-enheten Suffering from a hearing impairment or deafness has major consequences on the individual's social life. Today, there exist various aids, but there are some challenges Besöksadress: with these, like availability, reliability and high cognitive load when the user trying to Ångströmlaboratoriet Lägerhyddsvägen 1 focus on both the aid and the surrounding context. To overcome these challenges, Hus 4, Plan 0 one potential solution could make use of a combination of Augmented Reality (AR) and speech-to-text systems, where speech is converted into text that is then Postadress: presented in AR-glasses. However, in AR, one crucial problem is the legibility and Box 536 751 21 Uppsala readability of text under different environmental conditions. Moreover, different types of AR-glasses have different usage characteristics, which implies that a certain type of Telefon: glasses might be more suitable for the proposed system than others. For 018 – 471 30 03 speech-to-text systems, it is necessary to consider factors such as accuracy, latency Telefax: and robustness when used in different acoustic environments and with different 018 – 471 30 00 speech audio. Hemsida: In this master thesis, two different AR-glasses are being evaluated based on the http://www.teknat.uu.se/student different characteristics of the glasses, such as optical, visual and ergonomic. -

Chapter 6 – Output Devices - Review
Chapter 6 – Output Devices - Review What Are the Four Types of Output? Output is data that has been processed into a useful form. Computers process data (input) into information (output). Four categories of output are text, graphics, audio, and video. An output device is any hardware component that conveys information to one or more people. Commonly used output devices include display devices; printers; speakers, headphones, and earbuds; data projectors; interactive whiteboards; and force-feedback game controllers and tactile output. What Are the Characteristics of Various Display Devices? A display device, or simply display, is an output device that visually conveys text, graphics, and video information and consists of a screen and the components that produce the information on the screen. Desktop computers typically use a monitor as their display device; most mobile computers and devices integrate the display into the same physical case. LCD monitors, LCD screens, and plasma monitors are types of flat-panel displays. A flat-panel display is a lightweight display device with a shallow depth that typically uses LCD or gas plasma technology. An LCD monitor is a desktop monitor that uses a liquid crystal display to produce images. A plasma monitor is a display device that uses gas plasma technology, which substitutes a layer of gas for the liquid crystal material in an LCD monitor. A CRT monitor is a desktop monitor that contains a cathode-ray tube (CRT). CRT monitors take up more desk space and thus are not used much today. What Factors Affect the Quality of an LCD monitor or LCD screen? The quality of an LCD monitor or LCD screen depends primarily on its resolution, response time, brightness, dot pitch, and contrast ratio. -
An Autostereoscopic Display Ken Perlin, Salvatore Paxia, Joel S
An Autostereoscopic Display Ken Perlin, Salvatore Paxia, Joel S. Kollin Media Research Laboratory*, Dept. of Computer Science, New York University ABSTRACT We present a display device which solves a long-standing A graphical display is termed autostereoscopic when all of the problem: to give a true stereoscopic view of simulated objects, work of stereo separation is done by the display [Eichenlaub98], without artifacts, to a single unencumbered observer, while so that the observer need not wear special eyewear. A number of allowing the observer to freely change position and head rotation. researchers have developed displays which present a different image to each eye, so long as the observer remains fixed at a Based on a novel combination of temporal and spatial particular location in space. Most of these are variations on the multiplexing, this technique will enable artifact-free stereo to parallax barrier method, in which a fine vertical grating or become a standard feature of display screens, without requiring lenticular lens array is placed in front of a display screen. If the the use of special eyewear. The availability of this technology may observer’s eyes remain fixed at a particular location in space, then significantly impact CAD and CHI applications, as well as one eye can see only the even display pixels through the grating or entertainment graphics. The underlying algorithms and system lens array, and the other eye can see only the odd display pixels. architecture are described, as well as hardware and software This set of techniques has two notable drawbacks: (i) the observer aspects of the implementation. -
UNIT V STORAGE and DISPLAY INSTRUMENTS Cathode Ray
UNIT V STORAGE AND DISPLAY INSTRUMENTS Cathode Ray Oscilloscope The cathode Ray Oscilloscope or mostly called as CRO is an electronic device used for giving the visual indication of a signal waveform. It is an extremely useful and the most versatile instrument in the electronic industry. CRO is widely used for trouble shooting radio and television receivers as well as for laboratory research and design. Using a CRO, the wave shapes of alternating currents and voltages can be studied. It can also be used for measuring voltage, current, power, frequency and phase shift. Different types of oscilloscopes are available for various purposes. Block Diagram of CRO (Cathode Ray Oscilloscope) The figure below shows the block diagram of a general purpose CRO. As we can see from the above figure above, a CRO employs a cathode ray tube (CRT), which acts as the heart of the oscilloscope. In an oscilloscope, the CRT generates the electron beam which are accelerated to a high velocity and brought to focus on a fluorescent screen. This screen produces a visible spot where the electron beam strikes it. By deflecting the beam over the screen in response to the electrical signal, the electrons can be made to act as an electrical pencil of light which produces a spot of light wherever it strikes. For accomplishing these tasks various electrical signals and voltages are needed, which are provided by the power supply circuit of the oscilloscope. Low voltage supply is required for the heater of the electron gun to generate the electron beam and high voltage is required for the cathode ray tube to accelerate the beam. -
High Performance Micro-Scale Light Emitting Diode Display
University of Central Florida STARS Electronic Theses and Dissertations, 2020- 2020 High Performance Micro-scale Light Emitting Diode Display Fangwang Gou University of Central Florida Part of the Electromagnetics and Photonics Commons, and the Optics Commons Find similar works at: https://stars.library.ucf.edu/etd2020 University of Central Florida Libraries http://library.ucf.edu This Doctoral Dissertation (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2020- by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Gou, Fangwang, "High Performance Micro-scale Light Emitting Diode Display" (2020). Electronic Theses and Dissertations, 2020-. 222. https://stars.library.ucf.edu/etd2020/222 HIGH-PERFORMANCE MICRO-SCALE LIGHT EMITTING DIODE DISPLAY by FANGWANG GOU B.S. University of Electronic Science and Technology of China, 2012 M.S. Peking University, 2015 A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the College of Optics and Photonics at the University of Central Florida Orlando, Florida Summer Term 2020 Major Professor: Shin-Tson Wu 2020 Fangwang Gou ii ABSTRACT Micro-scale light emitting diode (micro-LED) is a potentially disruptive display technology because of its outstanding features such as high dynamic range, good sunlight readability, long lifetime, low power consumption, and wide color gamut. To achieve full-color displays, three approaches are commonly used: 1) to assemble individual RGB micro-LED pixels from semiconductor wafers to the same driving backplane through pick-and-place approach, which is referred to as mass transfer process; 2) to utilize monochromatic blue micro-LED with a color conversion film to obtain a white source first, and then employ color filters to form RGB pixels, and 3) to use blue or ultraviolet (UV) micro-LEDs to pump pixelated quantum dots (QDs). -

Enhanced Thin-Film Transistor Driven High-Aperture In-Plane Switching
www.nature.com/scientificreports OPEN Enhanced thin‑flm transistor driven high‑aperture in‑plane switching liquid crystal displays without common line and black matrix Masahiko Ando1* & Makoto Yoneya2 We developed active‑matrix in‑plane switching liquid crystal displays (IPS‑LCDs) with a new vertical structure composed of thin‑flm transistors (TFTs) that have an aperture ratio of 60% to reduce energy consumption. The novel TFT has a channel and a back channel made of a hydrogenated amorphous‑silicon semiconductor layer sandwiched by thin silicon oxide insulating layers. The transfer characteristics are enhanced by uniformly shifting the threshold voltage to be higher than the maximum LC driving voltage (typically > 5 V). The enhanced TFT characteristics provided with a new driving scheme and shielding electrodes enables both the common line and black matrix to be eliminated. We fabricated an IPS TFT‑LCD panel with aperture and contrast ratios that are 160% those of the conventional pixel structure. Afer half a century of tremendous eforts in material research and device development and massive investments in advanced manufacturing technology, thin-flm transistor liquid crystal displays (TFT LCDs) have now become the most common type of fat panel display1. As the total worldwide LCD-related electrical energy consumption is signifcantly increasing due to the explosive increase in the use of displays for various purposes, especially for large-screen LCD TVs, the energy efciency of TFT-LCDs should be improved to meet global sustainability requirements2. Here, while organic light emitting displays (OLEDs) prevail in small display markets such as for smartphones, tablets, and fexible displays, LCDs dominate in larger-screen TV applications because of their higher energy efciency and ambient contrast ratio3,4.