On the Influence of Ride Height Changes on the Aerodynamic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Designed for Speed : Three Automobiles by Ferrari
Designed for speed : three automobiles by Ferrari Date 1993 Publisher The Museum of Modern Art Exhibition URL www.moma.org/calendar/exhibitions/411 The Museum of Modern Art's exhibition history— from our founding in 1929 to the present—is available online. It includes exhibition catalogues, primary documents, installation views, and an index of participating artists. MoMA © 2017 The Museum of Modern Art * - . i . ' ' y ' . Designed for Speed: Three Automobiles by Ferrari k \ ' . r- ; / THE MUSEUM OF MODERN ART, NEW YORK The nearer the automobile approaches its utilitarian ends, the more beautiful it becomes. That is, when the vertical lines (which contrary to its purpose) dominated at its debut, it was ugly, and people kept buying horses. Cars were known as "horseless carriages." The necessity of speed lowered and elongated the car so that the horizontal lines, balanced by the curves, dominated: it became a perfect whole, logically organized for its purpose, and it was beautiful. —Fernand Leger "Aesthetics of the Machine: The Manufactured Object, The Artisan, and the Artist," 1924 M Migh-performance sports and racing cars represent some of the ultimate achievements of one of the world's largest industries. Few objects inspire such longing and acute fascination. As the French critic and theorist Roland Barthes observed, "I think that cars today are almost the exact equiv alent of the great Gothic cathedrals: I mean the supreme creation of an era, conceived with passion by unknown artists, and consumed in image if not in usage by a whole population which appropriates them as a purely magical object." Unlike most machines, which often seem to have an antagonistic relationship with people, these are intentionally designed for improved handling, and the refinement of the association between man and machine. -

2008-2009 Design and Fabrication of a SAE Baja Race Vehicle
2008-2009 Design and Fabrication of a SAE Baja Race Vehicle A Major Qualifying Project Report Submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science By: ____________________________ Derek Britton ____________________________ Jessy Cusack ____________________________ Alex Forti ____________________________ Patrick Goodrich ____________________________ Zachary Lagadinos ____________________________ Benjamin Lessard ____________________________ Wayne Partington ____________________________ Ethan Wyman Date: April 29,2009 ____________________________ Kenneth Stafford, Advisor ____________________________ James Van De Ven, Advisor ____________________________ Torbjorn Bergstrom, Advisor 1 Table of Contents List of Figures ..................................................................................................................... 5 List of Tables ...................................................................................................................... 9 Introduction ....................................................................................................................... 10 Design Goals ..................................................................................................................... 11 Chassis .............................................................................................................................. 13 Ergonomics................................................................................................................... -
Installation Instructions
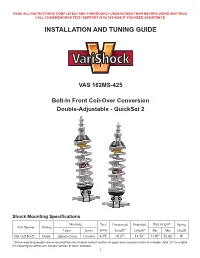
READ ALL INSTRUCTIONS COMPLETELY AND THOROUGHLY UNDERSTAND THEM BEFORE DOING ANYTHING. CALL CHASSISWORKS TECH SUPPORT (916) 388-0288 IF YOU NEED ASSISTANCE. INSTALLATION AND TUNING GUIDE VAS 162MS-425 Bolt-In Front Coil-Over Conversion Double-Adjustable - QuickSet 2 Shock Mounting Specifi cations Mounting Total Compressed Extended Ride Height* Spring Part Number Valving Upper LowerTravel Length* Length* Min. Max. Length VAS 162MS-425 Double Spherical Stem Crossbar 4.25” 10.27” 14.52” 11.97” 12.82” 9” * Shock mounting lengths are measured from the chassis contact surface of upper stem to pivot center of crossbar. Add .20” to lengths if measuring to control arm contact surface of lower crossbar. 1 PARTS LIST Prior to beginning installation use the following parts lists to verify that you have received all components required for installation. VAS 162MS-425 - VariShock QuickSet 2 Coil-Overs Part Number Qty Description 8A24XAX-43CH 2 QuickSet 2 Coil-Over Shock, Upper Stem and Short Lower Poly Mounts 3173-09-20-32 2 Bumpstop 1-1/4” long 899-020-208 2 Ball-Stud Top Mount Hardware VAS 501-103 1 Spring Seat Set, Extended 3/4” 3102-056-18RC 2 Jam Nut 9/16-18 RH, Clear Zinc 899-061-304 1 Crossbar Hardware Bag 899-012-HEX7/64 1 Ball-End Driver 7/64” Hex Screw 899-020-208 - Ball-Stud Top Mount Hardware Part Number Qty Description 3117-063-18C 1 Half Locknut 5/8-18 Nylon Insert 3144-25-28-0 1 Grease Zerk 1/4-28 Straight 899-044.63-1.13 1 Washer .635” ID x 1.13” OD, Zinc-Plated Steel 899-044.70-1.25 1 Washer .695” ID x 1.25” OD, Zinc-Plated Steel 899-060-201 -
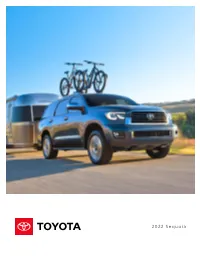
MY22 Sequoia Ebrochure
2022 Sequoia Page 1 2022 SEQUOIA Room for everyone and everything. Whether you’re navigating through the urban jungle or traveling off the beaten path, the 2022 Toyota Sequoia is ready to turn every drive into an adventure. Three rows of seats let you bring up to eight, while its spacious interior and powerful 5.7L V8 engine let you load it up and haul even more, to make the most of the places you’ll go. Limited shown in Shoreline Blue Pearl. Cover image: See footnotes 1 and 2 for information on towing and roof payload. See numbered footnotes in Disclosures section. Page 2 INTERIOR In Sequoia, everyone gets to ride first class. Hear Comfort your music like never before with the available JBL®3 within reach. Premium Audio system, and let your rear-seat passengers catch up on their favorite movies with the available rear-seat Blu-ray Disc™ player. Platinum interior shown in Red Rock leather trim. Simulation shown. Heated and ventilated front seats Moonroof Three-zone climate control The available heated and ventilated front Let more of the outside in with Sequoia’s The driver, front passenger and rear seats found inside Sequoia Platinum give standard one-touch tilt/slide power passengers will be comfortable inside the driver and front passenger more comfort moonroof with sliding sunshade. Open Sequoia, thanks to its three-zone automatic and the option to warm up or cool down it up to let in some fresh air, brighten climate control in the front and rear of the with the touch of a button. -

Honda Quits F1! Japanese Manufacturer to Bring Curtain Down on Race-Winning Programme
>> Britain’s Land Speed Record attempt update – see p36 December 2020 • Vol 30 No 12 • www.racecar-engineering.com • UK £5.95 • US $14.50 Honda quits F1! Japanese manufacturer to bring curtain down on race-winning programme CASH CONTROL We reveal the details of Formula 1’s Concorde deal SAFETY CELL The latest in composite chassis technology design INDYCAR SCREEN Aerodine on building US single seater safety device VIRTUAL TRADE Exciting new engineering products for the 2021 season 01 REV30N12_Cover_Honda-ACbs.indd 1 19/10/2020 12:56 THE EVOLUTION IN FLUID HORSEPOWER ™ ™ XRP® ProPLUS RaceHose and ™ XRP® Race Crimp Hose Ends A full PTFE smooth-bore hose, manufactured using a patented process that creates convolutions only on the outside of the tube wall, where they belong for increased flexibility, not on the inside where they can impede flow. This smooth-bore race hose and crimp-on hose end system is sized to compete directly with convoluted hose on both inside diameter and weight while allowing for a tighter bend radius and greater flow per size. Ten sizes from -4 PLUS through -20. Additional "PLUS" sizes allow for even larger inside hose diameters as an option. CRIMP COLLARS Two styles allow XRP NEW XRP RACE CRIMP HOSE ENDS™ Race Crimp Hose Ends™ to be used on the ProPLUS Black is “in” and it is our standard color; Race Hose™, Stainless braided CPE race hose, XR- Blue and Super Nickel are options. Hundreds of styles are available. 31 Black Nylon braided CPE hose and some Bent tube fixed, double O-Ring sealed swivels and ORB ends. -

Design of a Freeway-Capable Narrow Lane Vehicle*
O4ANNUAL-989 Design of a Freeway-Capable Narrow Lane Vehicle* Kurt Kornbluth, Andrew Burke U.C. Davis lnstitute for Transportation Studies, Davis, CA Geoff Wardle, Nathan Nickell Art Center College of Design, Pasadena, CA Copyright @ 2003 SAE lnternational ABSTRACT This study focuses on the design of a narrow (44 inches maximum width) vehicle capable of moving two occupants safely at freeway speeds with an emphasis on comfort, efficiency and performance. The design addresses consumer acceptance problems of past narrow vehicles such as "too small", "too ugly", "too unstable", "too wet", "too slow", "too complicated", and "too expensive". A full CAD model was developed to show the external vehicle shape, occupant seating and ergonomics, and the packaging of driveline components. Simulations were run using S/MPLFV and Advisor 2002 to predict vehicle performance and range. The size and mass characteristics of the driveline components used in the simulations were based on commercially-available EV products and selected for the special requirements of a relatively lightweight (450400 kg) vehicle. Dynamic Figure I stability and safety of the vehicle are of prime importance and were considered in all phases of the design. Previous studies by PATH (Partners for The narrow lane "commute/'vehicle is designed Advanced Highways and Transit) and others (1) have to permit two cars to travel abreast on a standard lane, illuminated the need and viability for a class of smaller, or single file on a shoulder or auxiliary lane of highway. lighter vehicles to complement existing vehicles and The vehicle modeled incorporates electric drive and is infrastructure. lnnovative vehicles like this have been designed to have a >100 mile range using lithium-ion referred to as "Lean Machines", (2), "ultralight vehicles" batteries. -

American Iron Extreme Racing Series
2019 American Iron Extreme National Champion Robert Shaw American Iron Extreme Racing Series 2020 EDITION Novemb er 2019 V1.0 THIS BOOK IS AN OFFICIAL PUBLICATION OF THE NATIONAL AUTO SPORT ASSOCIATION. ALL RIGHTS RESERVED. NOTE- MID-SEASON UPDATES MAY BE PUBLISHED. PLEASE NOTE THE VERSION NUMBER ABOVE. THE CONTENTS OF THIS BOOK ARE THE SOLE PROPERTY OF THE NATIONAL AUTO SPORT ASSOCIATION. National Auto Sport Association National Office P.O. Box 2366 Napa Valley, CA 94558 http://www.nasaproracing.com 510-232-NASA 510-412-0549 FAX 1 Contents 2020 Rules and Classifications 2 1. Introduction 2 2. Intent 2 3. Sanctioning Body 3 4. Eligible Manufacturers/Models/Configurations 3 5. Safety 3 6. Car Classifications 5 6.2 Power & Weight 5 7. Modifications 5 8 Inspection and Testing 8 9 On Course Conduct 9 10 Points Structure 9 11. American Iron Extreme Directors / Web Page 10 2 American Iron Extreme Racing Series Copyright 2019, National Auto Sport Association Official Rules Rules Subject To Change 2020 Rules and Classifications 1. Introduction The American Iron Series is a series with 3 classes: Spec Iron (SI), American Iron (AI) and American Iron Extreme (AIX). The American Iron Extreme Series was created to meet the needs of domestic sedan racers looking for a series specifically tailored to accommodate highly modified vehicles that are currently relegated to racing in Unlimited or Spec-limited classes. This class is designed to field a large high-profile group of American Musclecars and will unify fields of cars that currently race in other sanctioning organizations. This large field/open modification concept will provide racers and vendors access to a promotional racing venue containing similarly prepared and appearing cars that can run nearly unlimited configurations. -

Copyrighted Material
1 Introduction 1.1 History The current world-wide production of vehicle dampers, or so-called shock absorbers, is difficult to estimate with accuracy, but is probably around 50–100 million units per annum with a retail value well in excess of one billion dollars per annum. A typical European country has a demand for over 5 million units per year on new cars and over 1 million replacement units, The US market is several times that. If all is well, these suspension dampers do their work quietly and without fuss. Like punctuation or acting, dampers are at their best when they are not noticed - drivers and passengers simply want the dampers to be trouble free. In contrast, for the designer they are a constant interest and challenge. For the suspension engineer there is some satisfaction in creating a good new damper for a racing car or rally car and perhaps making some contribution to competition success. Less exciting, but economically more important, there is also satisfaction in seeing everyday vehicles travelling safely with comfortable occupants at speeds that would, even on good roads, be quite impractical without an effective suspension system. The need for dampers arises because of the roll and pitch associated with vehicle manoeuvring, and from the roughness of roads. In the mid nineteenth century, road quality was generally very poor. The better horse-drawn carriages of the period therefore had soft suspension, achieved by using long bent leaf springs called semi-elliptics, or even by using a pair of such curved leaf springs set back-to-back on each side, forming full-elliptic suspension. -

Is This the Same #67 in Both Pictures? Ken
Is this the same #67 in both pictures? Ken Gypson’s ‘37 Ford has been around creating history for 81 years and still going strong. Hal Boardman’s diorama above proves the car still inspires...more on page 6 From our president, Dan Noyes - VAE Chairman 802-730-7171 [email protected] David Dave Stone- President Stone 802-598-2842 [email protected] Jan Sander- 1st. Vice & Activity Chair 802-644-5487 [email protected] Duane Leach– 2nd. Vice & Assistant Activity Chair 802-849-6174 [email protected] Don Pierce- Treasurer 802-879-3087 [email protected] PO Box 1064, Montpelier,VT. 05602 Charlie Thompson- Recording Secretary 802-878-2536 [email protected] Here we go, another season of shows and get togethers. Tom McHugh 802-862-1733 Chris Barbieri 802-223-3104 Finally, old man winter has evolved to the warmer days of spring. Time to Dave Sander 802-434-8418 Nominating committee...David Sander, Dan Noyes & wake up the rolling history and automotive classics. Brian Warren Every spring is like a rebirth of enthusiasm for the hobby. We all have a process that we have mastered, over the years, to get our vehicles back on the road. After winters hibernation, like a ritual, we have perfected this. It comes from many years of living in the northeast. That first drive of the year in a classic or muscle car rejuvenates the soul and Ed Hilbert– Chair Gary Olney brings us back from our hibernation, too. Gael Boardman–V- John Malinowski Chair Gary Fiske Make sure you check all your vehicle’s systems before heading Wendell Noble– Sec. -

Fundamental Studies of Passive, Active and Semi-Active
FUNDAMENTAL STUDIES OF PASSIVE, ACTIVE AND SEMI-ACTIVE AUTOMOTIVE SUSPENSION SYSTEMS SAMY ALY HASSAN Submitted in accordance with the requirements for the degree of Doctor of Philosophy The University of Leeds Department of Mechanical Engineering J u l y 1986 ABSTRACT The fundamental properties of various automotive suspension systems are theoretically investigated on the basis of simple vehicle models subjected to realistic inputs chosen to represent road surfaces of different qualities. The vehicle response is evaluated through a performance index representing ride comfort, dynamic tyre load and suspension working space parameters, and interpreted in the light of these individual parameters together with the implications of the suspension design for attitude control and steering behaviour. Linear analysis procedures are followed in studying the passive, active and slow-active suspension systems while suitable simulations are used for the non-linear semi-active suspension systems. Linear optimal control theory is used to determine the optimal parameters of the active and slow-active suspension systems. Semi-active suspension behaviours are evaluated on the basis of applying the optimal active parameters to each system, but the semi-active damper can only dissipate energy and switches off when external power would be needed for the system to follow the optimal active control law. Results are generated and discussed for each of these types of system and their performance capabilities are compared with each other. Conclusions concerning the practical viability of each of the systems are drawn. ii CONTENTS page A B S T R A C T ........................................................ i C O N T E N T S ....................................................... -
2020 Aviator
2020 AVIATOR ALWAYS BEGIN ON A BRIGHT NOTE Whether your day ahead is filled with places to be, or as open as a big blue sky, the all-new 2020 Lincoln Aviator starts it with a warm embrace. As you approach, Lincoln Dynamic Signature Lighting1 flows beneath the headlamps, while the illuminated1 Lincoln Star on the grille glows from within. Illuminated welcome mats and backlit door handles extend an invitation, while the Dynamic Lower Entry feature of the Air Glide Suspension1 eases access for all. Whether you select Aviator or Aviator Grand Touring2 with its advanced hybrid electric technology, every drive starts with beautiful chimes orchestrated by a world-renowned symphony as the LCD screen animation takes you soaring through blue skies. Elevate life’s journey in the all-new Aviator. 1Available feature. 2Available only at EV-certified Lincoln Dealers. Late availability. IMMERSE YOURSELF IN ELEGANCE ENGAGE WITH EXCLUSIVE 3D AUDIO Imagine a place specially designed to evoke a sense You won’t just hear it – you’ll feel the exceptional of serenity, a sanctuary where you can relax and unwind level of precision and musical accuracy offered by after a challenging day. The 3-row Aviator cabin is the expertly engineered Revel® Ultima 3D Audio carefully crafted to be that place. Enter using your System.1 Enjoy your favorites through a network of Phone As A Key,1,2 while Aviator recalls your saved 28 speakers – including 8 in the headliner – finely Personal Profile settings for the driver’s seat and so much tuned to the Aviator interior. It’s as if you’re seated in more. -

Body Builder Instructions
Body Builder Instructions Volvo Trucks North America Axle and Suspension VN, VHD, VAH Section 6 Introduction This document provides information on axle and suspension applications in Volvo vehicles. Note: We have attempted to cover as much information as possible. However, this information does not cover all the unique variations that a vehicle may present. Note that illustrations are typical but may not reflect all the variations of assembly. All data provided is based on information that was current at time of release. However, this information is subject to change without notice. Please note that no part of this information may be reproduced, stored, or transmitted by any means without the express written permission of Volvo Trucks North America. Contents: • “VN Front Axle”, page 2 • “VHD Front Axle ”, page 4 • “VOLVO Rear Suspension”, page 8 • “Single Axle Rear Suspension”, page 8 • “VOLVO 6 x 4 (T-Ride)”, page 13 • “VOLVO Air Suspension”, page 26 • “Hendrickson Axle Suspension”, page 27 • “Hendrickson RT403/RT463”, page 28 • “Hendrickson HAS Air Suspension”, page 30 • “Hendrickson Primaax”, page 33 • “Air System”, page 42 • “Air Suspension Height, Adjustment”, page 44 • “Rear Axle Literature”, page 46 Volvo Body Builder Instructions VN, VHD, VAH, Section 6 USA138165691 Date 1.2017 Page 1 (46) All Rights Reserved Front Axle VN Front Axle Options Manufac- Axle Axle Weight Hub Sales SWB SWB MWB MWB LWB LWB turer Model Drop Rating Type Code (<190) (<190) (191– (191– (<231) (<231) Inner Outer 230) In- 230) Out- Inner Outer Wheel- Wheel- ner er Wheel- Wheel- cut cut Wheel- Wheel- cut cut cut cut 3.5” 12,000 Basic 370113 lbs.