Improved Gradient Descent-Based Chroma Subsampling Method For
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
JPEG Image Compression
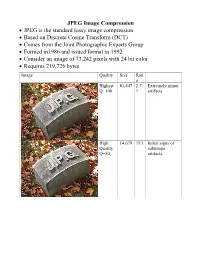
JPEG Image Compression JPEG is the standard lossy image compression Based on Discrete Cosine Transform (DCT) Comes from the Joint Photographic Experts Group Formed in1986 and issued format in 1992 Consider an image of 73,242 pixels with 24 bit color Requires 219,726 bytes Image Quality Size Rati o Highest 81,447 2.7: Extremely minor Q=100 1 artifacts High 14,679 15:1 Initial signs of Quality subimage Q=50 artifacts Medium 9,407 23:1 Stronger Q artifacts; loss of high frequency information Low 4,787 46:1 Severe high frequency loss leads to obvious artifacts on subimage boundaries ("macroblocking ") Lowest 1,523 144: Extreme loss of 1 color and detail; the leaves are nearly unrecognizable JPEG How it works Begin with a color translation RGB goes to Y′CBCR Luma and two Chroma colors Y is brightness CB is B-Y CR is R-Y Downsample or Chroma Subsampling Chroma data resolutions reduced by 2 or 3 Eye is less sensitive to fine color details than to brightness Block splitting Each channel broken into 8x8 blocks no subsampling Or 16x8 most common at medium compression Or 16x16 Must fill in remaining areas of incomplete blocks This gives the values DCT - centering Center the data about 0 Range is now -128 to 127 Middle is zero Discrete cosine transform formula Apply as 2D DCT using the formula Creates a new matrix Top left (largest) is the DC coefficient constant component Gives basic hue for the block Remaining 63 are AC coefficients Discrete cosine transform The DCT transforms an 8×8 block of input values to a linear combination of these 64 patterns. -

COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING
COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING Color space A color model is an abstract mathematical model describing the way colors can be represented as tuples of numbers, typically as three or four values or color components (e.g. RGB and CMYK are color models). However, a color model with no associated mapping function to an absolute color space is a more or less arbitrary color system with little connection to the requirements of any given application. Adding a certain mapping function between the color model and a certain reference color space results in a definite "footprint" within the reference color space. This "footprint" is known as a gamut, and, in combination with the color model, defines a new color space. For example, Adobe RGB and sRGB are two different absolute color spaces, both based on the RGB model. In the most generic sense of the definition above, color spaces can be defined without the use of a color model. These spaces, such as Pantone, are in effect a given set of names or numbers which are defined by the existence of a corresponding set of physical color swatches. This article focuses on the mathematical model concept. Understanding the concept Most people have heard that a wide range of colors can be created by the primary colors red, blue, and yellow, if working with paints. Those colors then define a color space. We can specify the amount of red color as the X axis, the amount of blue as the Y axis, and the amount of yellow as the Z axis, giving us a three-dimensional space, wherein every possible color has a unique position. -
The Video Codecs Behind Modern Remote Display Protocols Rody Kossen
The video codecs behind modern remote display protocols Rody Kossen 1 Rody Kossen - Consultant [email protected] @r_kossen rody-kossen-186b4b40 www.rodykossen.com 2 Agenda The basics H264 – The magician Other codecs Hardware support (NVIDIA) The basics 4 Let’s start with some terms YCbCr RGB Bit Depth YUV 5 Colors 6 7 8 9 Visible colors 10 Color Bit-Depth = Amount of different colors Used in 2 ways: > The number of bits used to indicate the color of a single pixel, for example 24 bit > Number of bits used for each color component of a single pixel (Red Green Blue), for example 8 bit Can be combined with Alpha, which describes transparency Most commonly used: > High Color – 16 bit = 5 bits per color + 1 unused bit = 32.768 colors = 2^15 > True Color – 24 bit Color + 8 bit Alpha = 8 bits per color = 16.777.216 colors > Deep color – 30 bit Color + 10 bit Alpha = 10 bits per color = 1.073 billion colors 11 Color Bit-Depth 12 Color Gamut Describes the subset of colors which can be displayed in relation to the human eye Standardized gamut: > Rec.709 (Blu-ray) > Rec.2020 (Ultra HD Blu-ray) > Adobe RGB > sRBG 13 Compression Lossy > Irreversible compression > Used to reduce data size > Examples: MP3, JPEG, MPEG-4 Lossless > Reversable compression > Examples: ZIP, PNG, FLAC or Dolby TrueHD Visually Lossless > Irreversible compression > Difference can’t be seen by the Human Eye 14 YCbCr Encoding RGB uses Red Green Blue values to describe a color YCbCr is a different way of storing color: > Y = Luma or Brightness of the Color > Cr = Chroma difference -

Image Compression GIF (Graphics Interchange Format) LZW (Lempel
GIF (Graphics Interchange Image Compression Format) • GIF (Graphics Interchange Format) • Introduced by Compuserve in 1987 (GIF87a), multiple-image in one file/application specific • PNG (Portable Network Graphics)/MNG metadata support added in 1989 (GIF89a) (Multiple-image Network Graphics) • LZW (Lempel-Ziv-Welch) compression replaced • JPEG (Joint Pictures Experts Group) earlier RLE (Run Length Encoding) B&W version – Patented by Compuserve/Unisys (has run out in US, will run out in June 2004 in Europe) • Maximum of 256 colours (from a palette) including a “transparent” colour • Optional interlacing feature • http://www.w3.org/Graphics/GIF/spec-gif89a.txt LZW (Lempel-Ziv-Welch) LZW Algorithm • Most of this method was invented and published • Dictionary initially contains all possible one byte codes by Lempel and Ziv in 1978 (LZ78 algorithm) (256 entries) • Input is taken one byte at a time to find the longest initial • A few details and improvements were later given string present in the dictionary by Welch in 1984 (variable increasing index sizes, • The code for that string is output, then the string is efficient dictionary data structure) extended with one more input byte, b • Achieves approx. 50% compression on large • A new entry is added to the table mapping the extended English texts string to the next unused code • superseded by DEFLATE and Burrows-Wheeler • The process repeats, starting from byte b transform methods • The number of bits in an output code, and hence the maximum number of entries in the table is fixed • once -

Basics of Video
Analog and Digital Video Basics Nimrod Peleg Update: May. 2006 1 Video Compression: list of topics • Analog and Digital Video Concepts • Block-Based Motion Estimation • Resolution Conversion • H.261: A Standard for VideoConferencing • MPEG-1: A Standard for CD-ROM Based App. • MPEG-2 and HDTV: All Digital TV • H.263: A Standard for VideoPhone • MPEG-4: Content-Based Description 2 1 Analog Video Signal: Raster Scan 3 Odd and Even Scan Lines 4 2 Analog Video Signal: Image line 5 Analog Video Standards • All video standards are in • Almost any color can be reproduced by mixing the 3 additive primaries: R (red) , G (green) , B (blue) • 3 main different representations: – Composite – Component or S-Video (Y/C) 6 3 Composite Video 7 Component Analog Video • Each primary is considered as a separate monochromatic video signal • Basic presentation: R G B • Other RGB based: – YIQ – YCrCb – YUV – HSI To Color Spaces Demo 8 4 Composite Video Signal Encoding the Chrominance over Luminance into one signal (saving bandwidth): – NTSC (National TV System Committee) North America, Japan – PAL (Phased Alternation Line) Europe (Including Israel) – SECAM (Systeme Electronique Color Avec Memoire) France, Russia and more 9 Analog Standards Comparison NTSC PAL/SECAM Defined 1952 1960 Scan Lines/Field 525/262.5 625/312.5 Active horiz. lines 480 576 Subcarrier Freq. 3.58MHz 4.43MHz Interlacing 2:1 2:1 Aspect ratio 4:3 4:3 Horiz. Resol.(pel/line) 720 720 Frames/Sec 29.97 25 Component Color TUV YCbCr 10 5 Analog Video Equipment • Cameras – Vidicon, Film, CCD) • Video Tapes (magnetic): – Betacam, VHS, SVHS, U-matic, 8mm ... -

Chroma Subsampling Influence on the Perceived Video Quality for Compressed Sequences in High Resolutions
DIGITAL IMAGE PROCESSING AND COMPUTER GRAPHICS VOLUME: 15 j NUMBER: 4 j 2017 j SPECIAL ISSUE Chroma Subsampling Influence on the Perceived Video Quality for Compressed Sequences in High Resolutions Miroslav UHRINA, Juraj BIENIK, Tomas MIZDOS Department of Multimedia and Information-Communication Technologies, Faculty of Electrical Engineering, University of Zilina, Univerzitna 1, 01026, Zilina, Slovak Republic [email protected], [email protected], [email protected] DOI: 10.15598/aeee.v15i4.2414 Abstract. This paper deals with the influence of 2. State of the Art chroma subsampling on perceived video quality mea- sured by subjective metrics. The evaluation was Although many research activities focus on objective done for two most used video codecs H.264/AVC and and subjective video quality assessment, only a few of H.265/HEVC. Eight types of video sequences with Full them analyze the quality affected by chroma subsam- HD and Ultra HD resolutions depending on content pling. In the paper [1], the efficiency of the chroma were tested. The experimental results showed that ob- subsampling for sequences with HDR content using servers did not see the difference between unsubsampled only objective metrics is assessed. The paper [2] and subsampled sequences, so using subsampled videos presents a novel chroma subsampling strategy for com- is preferable even 50 % of the amount of data can be pressing mosaic videos with arbitrary RGB-CFA struc- saved. Also, the minimum bitrates to achieve the good tures in H.264/AVC and High Efficiency Video Coding and fair quality by each codec and resolution were de- (HEVC). -

View Study (E19007) Luc Goethals, Nathalie Barth, Jessica Guyot, David Hupin, Thomas Celarier, Bienvenu Bongue
JMIR Aging Volume 3 (2020), Issue 1 ISSN: 2561-7605 Editor in Chief: Jing Wang, PhD, MPH, RN, FAAN Contents Editorial Mitigating the Effects of a Pandemic: Facilitating Improved Nursing Home Care Delivery Through Technology (e20110) Linda Edelman, Eleanor McConnell, Susan Kennerly, Jenny Alderden, Susan Horn, Tracey Yap. 3 Short Paper Impact of Home Quarantine on Physical Activity Among Older Adults Living at Home During the COVID-19 Pandemic: Qualitative Interview Study (e19007) Luc Goethals, Nathalie Barth, Jessica Guyot, David Hupin, Thomas Celarier, Bienvenu Bongue. 10 Original Papers Impact of the AGE-ON Tablet Training Program on Social Isolation, Loneliness, and Attitudes Toward Technology in Older Adults: Single-Group Pre-Post Study (e18398) Sarah Neil-Sztramko, Giulia Coletta, Maureen Dobbins, Sharon Marr. 15 Clinician Perspectives on the Design and Application of Wearable Cardiac Technologies for Older Adults: Qualitative Study (e17299) Caleb Ferguson, Sally Inglis, Paul Breen, Gaetano Gargiulo, Victoria Byiers, Peter Macdonald, Louise Hickman. 23 Actual Use of Multiple Health Monitors Among Older Adults With Diabetes: Pilot Study (e15995) Yaguang Zheng, Katie Weinger, Jordan Greenberg, Lora Burke, Susan Sereika, Nicole Patience, Matt Gregas, Zhuoxin Li, Chenfang Qi, Joy Yamasaki, Medha Munshi. 31 The Feasibility and Utility of a Personal Health Record for Persons With Dementia and Their Family Caregivers for Web-Based Care Coordination: Mixed Methods Study (e17769) Colleen Peterson, Jude Mikal, Hayley McCarron, Jessica Finlay, Lauren Mitchell, Joseph Gaugler. 40 Perspectives From Municipality Officials on the Adoption, Dissemination, and Implementation of Electronic Health Interventions to Support Caregivers of People With Dementia: Inductive Thematic Analysis (e17255) Hannah Christie, Mignon Schichel, Huibert Tange, Marja Veenstra, Frans Verhey, Marjolein de Vugt. -

Digital Video Video
Digital Video Video Video come from a camera, which records what it sees as a sequence of image Image frames comprise the video – Frame rate = presentation of successive frames – Minimal image changing between frames – Frequency of frames is measured in frames per second (fps) Sequence of still images creates the illusion of movement – > 16 fps is “smooth” – Standards: 29.97 fps NTSC 24 fps for movies 25 fps for PAL 60 fps for HDTV Digital Video Formats Most video signals are color signals, YCbCr, RGB, etc. The YCbCr color representation is used for most video coding standards compliance with the CCIR601, CIF, SIF formats CCIR601: International Radio Consultation Committee) – Three components, Y Cb Cr – CCIR format has two option: • One for the NTSC TV system – 525 lines/frame @30 fps – Y= 720x480 active pixels – Cb, Cr = 360x240 active pixels, (4:2:2) • Another one for the PAL system – 625 lines/fram @25 fps – Y = 720x576 active pixels – Cb, Cr = 360x288 active pixels, (4:2:0) – SIF: Source Input Format • Y = 360x240 pixel/frame @ 30 fps; Y = 360x288 pixel/frame @25 fps • Cb, Cr = y/2 = 180x120 pixel/frame – CIF: Common Intermediate Format Note on Digital Video Sup-sampling The human eye responds more precisely to brightness information than it does to color, chroma subsampling ( decimating) takes advantage of this. o In a 4:4:4 scheme, each 8×8 matrix of RGB pixels converts to three YCrCb 8×8 matrices: one for luminance (Y) and one for each of the two chrominance bands (Cr and Cb). o A 4:2:2 scheme also creates one 8×8 luminance matrix but decimates every two horizontal pixels to create each chrominance-matrix entry. -
Visual Computing Systems CMU 15-769, Fall 2016 Lecture 7
Lecture 7: H.264 Video Compression Visual Computing Systems CMU 15-769, Fall 2016 Example video Go Swallows! 30 second video: 1920 x 1080, @ 30fps After decode: 8-bits per channel RGB → 24 bits/pixel → 6.2MB/frame (6.2 MB * 30 sec * 30 fps = 5.2 GB) Size of data when each frames stored as JPG: 531MB Actual H.264 video fle size: 65.4 MB (80-to-1 compression ratio, 8-to-1 compared to JPG) Compression/encoding performed in real time on my iPhone 5s CMU 15-769, Fall 2016 H.264/AVC video compression ▪ AVC = advanced video coding ▪ Also called MPEG4 Part 10 ▪ Common format in many modern HD video applications: - Blue Ray - HD streaming video on internet (Youtube, Vimeo, iTunes store, etc.) - HD video recorded by your smart phone - European broadcast HDTV (U.S. broadcast HDTV uses MPEG 2) - Some satellite TV broadcasts (e.g., DirecTV) ▪ Beneft: much higher compression ratios than MPEG2 or MPEG4 - Alternatively, higher quality video for fxed bit rate ▪ Costs: higher decoding complexity, substantially higher encoding cost - Idea: trades off more compute for requiring less bandwidth/storage CMU 15-769, Fall 2016 Hardware implementations ▪ Support for H.264 video encode/decode is provided by fxed-function hardware on many modern processors (not just mobile devices) ▪ Hardware encoding/decoding support existed in modern Intel CPUs since Sandy Bridge (Intel “Quick Sync”) ▪ Modern operating systems expose hardware encode decode support through APIs - e.g., DirectShow/DirectX (Windows), AVFoundation (iOS) CMU 15-769, Fall 2016 Video container format -

AN EFFICIENT COLOR SPACE CONVERSION USING XILINX SYSTEM GENERATOR A.Mounika M.Tech Student, Dept
PAIDEUMA Issn No : 0090-5674 AN EFFICIENT COLOR SPACE CONVERSION USING XILINX SYSTEM GENERATOR A.Mounika M.Tech Student, Dept. of E.C.E,Annamacharya Institute of Technology and Sciences Rajampet, Andhra Pradesh Mr.M.Hanumanthu Assistant Professor, Dept. of E.C.E, Annamacharya Institute of Technology and Sciences, Rajampet, Andhra Pradesh Abstract: In today’s world there is enormous increase in 3D demand which is quite natural, as market is growing rapidly due to huge requirement of electronics media Humans will discern the depth illusion in a 3D image from two non- identical perspectives. The two viewpoints are from both the eyes provides an excellent immersive vision. The two different images are collectively called as a stereoscopic image and the whole process is called stereo image method.Stereoscopic 3D images are elementarily obtained by overlapping left and right eye images in different color planes of a single image for successive viewing through colored glasses. Here we present a novel reconfigurable architecture for 3D image color space conversion RGB to YCbCr by using 4:2:0 chroma subsampling method for implementing Digital image applications and compression of images ,low power low area using Xilinx System Generator (XSG) for MATLAB. And it is compared with the 4:2:2 chroma sub sampling method. The color space conversion (CSC) is implemented in Matlab simulink using xilinx block sets. Finally the Verilog code is generated using Xilinx system generator. This code is verified by Xilinx simulation tool for generating hardware requirement and power reports. Keywords-- CSC, FPGA, XSG, Simulink, Chroma subsampling I.INTRODUCTION In today’s world there is enormous increase in 3D simply a model of representing what we see in demand which is quite natural, as market is tuples. -
Lecture 13 Review Questions.Pdf
Multimedia communications ECP 610 Omar A. Nasr [email protected] May, 2015 1 Take home messages from the course: Google, Facebook, Microsoft and other content providers would like to take over the whole stack! Google 2 3 4 5 6 7 Multimedia communications involves: Media coding (Speech, Audio, Images, Video coding) Media transmission Media coding (compression) Production models (For speech, music, image, video) Perception models Auditory system Masking Ear sensitivity to different frequency ranges Visual system Brightness vs color Low frequency vs High frequency Quality of Service and Perception QoS for voice QoS for video 8 Speech production system 9 10 Perception system 11 12 Digital Image Representation (3 Bit Quantization) CS 414 - Spring 2009 Image Representations Black and white image single color plane with 1 bits Gray scale image single color plane with 8 bits Color image three color planes each with 8 bits RGB, CMY, YIQ, etc. Indexed color image single plane that indexes a color table Compressed images TIFF, JPEG, BMP, etc. 4 gray levels 2gray levels Image Representation Example 24 bit RGB Representation (uncompressed) 128 135 166 138 190 132 129 255 105 189 167 190 229 213 134 111 138 187 128 138 135 190 166 132 129 189 255 167 105 190 229 111 213 138 134 187 Color Planes Techniques used in coding: Loss-Less compression : Huffman coding Variable length, prefix, uniquely decodable code Main objective: optimally assign different number of bits to symbols having different frequencies 16 Discrete -

Lec23.Ps (Mpage)
What do We Mean by “Close”? 2 CSC310 – Information Theory Sam Roweis • Any lossy compression scheme is based (at least implicitly) on some idea of what counts as “close to the original”. • This is a question that can only be answered by considering the users of the compression program, and what they want. Lecture 23: • For images and audio signals, two fundamental issues are: – What differences can humans perceive? For example, to a first approximation, JPEG Lossy Image Compression humans perceive only relative energies of different frequency bands in audio but not the associated phases of sine waves. – What differences do humans find annoying or distracting? December 1, 2006 Slight changes in colour might be regarded as less important than making a straight line be jagged. Lossy Compression 1 JPEG Lossy Image Compression 3 • Many kinds of data — such as images and audio signals — contain • JPEG is a lossy image compression standard for full colour or “noise” and other information that is not really of interest. grayscale pictures, named after the Joint Photographic Experts Preserving such useless information seems wasteful. Group which defined it. • A common approach: Lossy compression, for which • The basic method involves breaking the image into small blocks, decompressing a compressed file gives you something close to the transforming each block into a Fourier basis, quantizing the original, but not necessarily exactly the original. coefficients and encoding the quantized coefficients using either • We should be able to compress to a smaller file size if we don’t Huffman codes or arithmetic coding. have to reproduce the original exactly.