Thesis Submitted to Florida Institute of Technology in Partial Fulfllment of the Requirements for the Degree Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Dod Space Technology Guide
Foreword Space-based capabilities are integral to the U.S.’s national security operational doctrines and processes. Such capa- bilities as reliable, real-time high-bandwidth communica- tions can provide an invaluable combat advantage in terms of clarity of command intentions and flexibility in the face of operational changes. Satellite-generated knowledge of enemy dispositions and movements can be and has been exploited by U.S. and allied commanders to achieve deci- sive victories. Precision navigation and weather data from space permit optimal force disposition, maneuver, decision- making, and responsiveness. At the same time, space systems focused on strategic nuclear assets have enabled the National Command Authorities to act with confidence during times of crisis, secure in their understanding of the strategic force postures. Access to space and the advantages deriving from operat- ing in space are being affected by technological progress If our Armed Forces are to be throughout the world. As in other areas of technology, the faster, more lethal, and more precise in 2020 advantages our military derives from its uses of space are than they are today, we must continue to dynamic. Current space capabilities derive from prior invest in and develop new military capabilities. decades of technology development and application. Joint Vision 2020 Future capabilities will depend on space technology programs of today. Thus, continuing investment in space technologies is needed to maintain the “full spectrum dominance” called for by Joint Vision 2010 and 2020, and to protect freedom of access to space by all law-abiding nations. Trends in the availability and directions of technology clearly suggest that the U.S. -

Ruimtewapens Schuldwoestijn Graffiti Without Gravity Van De Hoofdredacteur
Ruimtewapens Schuldwoestijn Graffiti without Gravity Van de hoofdredacteur: Het zal u hopelijk niet ontgaan zijn dat, door de komst van het Space Studies Program (SSP) van de International Space University én een groot aantal evenementen in de regio Delft, Den Haag, Leiden en Noordwijk, het een bijzondere ruimtevaartzomer geweest is. Deze ‘Sizzling Summer of Space’ is nu echter toch echt afgelopen. In het volgende nummer staat een nabeschouwing over SSP in Nederland gepland, maar in dit nummer vindt u hiernaast al vast een bijzondere foto van de Koning met de deelnemers tijdens de openingsceremonie en een verslag van een side event gesponsord door de NVR. De voorstelling ‘Fly me to the Moon’ is ook door de NVR ondersteund en is bezocht door een aantal van onze leden. Het theaterstuk maakte mooi gebruik van de bijzondere omgeving van Decos op de Space Campus in Noordwijk. Op de Space Campus zelf zijn veel nieuwe ontwikkelingen gaande waaraan we in de nabije toekomst aandacht willen geven. Bij de voorplaat In dit nummer vindt u het eerste artikel uit een serie over ruimtewapens en een artikel over Gloveboxen dat we Het winnende kunstwerk van de ‘Graffiti without Gravity’ wedstrijd, overgenomen hebben, onder de samenwerkingsover- door Shane Sutton. [ESA/Hague Street Art/S. Sutton] eenkomst met de British Interplanetary Society, uit het blad Spaceflight. Het is goed als Nederlandse partijen zelf positief over hun producten zijn maar het is natuurlijk nog Foto van het kwartaal beter als een onafhankelijke buitenlandse publicatie dat opschrijft. Frappant is verder dat twee artikelen gerelateerd zijn aan lezingen bij het Ruimtevaart Museum in Lelystad, want zowel het boek Schuldwoestijn als het artikel over ruimtewapens zijn onderwerp van een lezing daar geweest. -

Orbital Fueling Architectures Leveraging Commercial Launch Vehicles for More Affordable Human Exploration
ORBITAL FUELING ARCHITECTURES LEVERAGING COMMERCIAL LAUNCH VEHICLES FOR MORE AFFORDABLE HUMAN EXPLORATION by DANIEL J TIFFIN Submitted in partial fulfillment of the requirements for the degree of: Master of Science Department of Mechanical and Aerospace Engineering CASE WESTERN RESERVE UNIVERSITY January, 2020 CASE WESTERN RESERVE UNIVERSITY SCHOOL OF GRADUATE STUDIES We hereby approve the thesis of DANIEL JOSEPH TIFFIN Candidate for the degree of Master of Science*. Committee Chair Paul Barnhart, PhD Committee Member Sunniva Collins, PhD Committee Member Yasuhiro Kamotani, PhD Date of Defense 21 November, 2019 *We also certify that written approval has been obtained for any proprietary material contained therein. 2 Table of Contents List of Tables................................................................................................................... 5 List of Figures ................................................................................................................. 6 List of Abbreviations ....................................................................................................... 8 1. Introduction and Background.................................................................................. 14 1.1 Human Exploration Campaigns ....................................................................... 21 1.1.1. Previous Mars Architectures ..................................................................... 21 1.1.2. Latest Mars Architecture ......................................................................... -

Next Generation Advanced Video Guidance Sensor: Low Risk Rendezvous and Docking Sensor
Next Generation Advanced Video Guidance Sensor: Low Risk Rendezvous and Docking Sensor Jimmy Lee1 and Connie Carrington2 NASA Marshall Space Flight Center, Huntsville, AL, 35812 Susan Spencer3 NASA Marshall Space Flight Center, Huntsville, AL, 35812 and Thomas Bryan, Ricky T. Howard, Jimmie Johnson4 NASA Marshall Space Flight Center, Huntsville, AL, 35812 The Next Generation Advanced Video Guidance Sensor (NGAVGS) is being built and tested at MSFC. This paper provides an overview of current work on the NGAVGS, a summary of the video guidance heritage, and the AVGS performance on the Orbital Express mission. This paper also provides a discussion of applications to ISS cargo delivery vehicles, CEV, and future lunar applications. I. Introduction ELATIVE navigation sensors are an enabling technology for exploration vehicles such as the National R Aeronautics and Space Administration’s (NASA’s) Crew Exploration Vehicle (CEV), cargo vehicles for logistics delivery to the International Space Station (ISS), and lunar landers. Additional applications are lunar sample return missions, satellite servicing, and future on-orbit assembly of space structures. The Next Generation Advanced Video Guidance Sensor (NGAVGS) is a third generation relative navigation sensor that incorporates the basic functions developed and flight proven in the Advanced Video Guidance Sensor (AVGS). The AVGS was the primary proximity operations and docking sensor in the first autonomous docking in the history of the U.S. space program, which was accomplished on May 5, 2007 during the Orbital Express (OE) mission. However, the AVGS hardware cannot be reproduced due to parts obsolescence, which has provided Marshall Space Flight Center (MSFC) an opportunity to replace an obsolete imager and processor with radiation tolerant parts, and to address critical CEV and ISS cargo vehicle relative navigation sensor requirements. -

STS-S26 Stage Set
SatCom For Net-Centric Warfare September/October 2010 MilsatMagazine STS-S26 stage set Military satellites Kodiak Island Launch Complex, photo courtesy of Alaska Aerospace Corp. PAYLOAD command center intel Colonel Carol P. Welsch, Commander Video Intelligence ..................................................26 Space Development Group, Kirtland AFB by MilsatMagazine Editors ...............................04 Zombiesats & On-Orbit Servicing by Brian Weeden .............................................38 Karl Fuchs, Vice President of Engineering HI-CAP Satellites iDirect Government Technologies by Bruce Rowe ................................................62 by MilsatMagazine Editors ...............................32 The Orbiting Vehicle Series (OV1) by Jos Heyman ................................................82 Brig. General Robert T. Osterhaler, U.S.A.F. (Ret.) CEO, SES WORLD SKIES, U.S. Government Solutions by MilsatMagazine Editors ...............................76 India’s Missile Defense/Anti-Satellite NEXUS by Victoria Samson ..........................................82 focus Warfighter-On-The-Move by Bhumika Baksir ...........................................22 MILSATCOM For The Next Decade by Chris Hazel .................................................54 The First Line Of Defense by Angie Champsaur .......................................70 MILSATCOM In Harsh Conditions.........................89 2 MILSATMAGAZINE — SEPTEMBER/OCTOBER 2010 Video Intelligence ..................................................26 Zombiesats & On-Orbit -
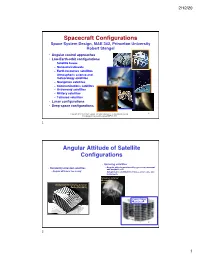
10. Spacecraft Configurations MAE 342 2016
2/12/20 Spacecraft Configurations Space System Design, MAE 342, Princeton University Robert Stengel • Angular control approaches • Low-Earth-orbit configurations – Satellite buses – Nanosats/cubesats – Earth resources satellites – Atmospheric science and meteorology satellites – Navigation satellites – Communications satellites – Astronomy satellites – Military satellites – Tethered satellites • Lunar configurations • Deep-space configurations Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. 1 http://www.princeton.edu/~stengel/MAE342.html 1 Angular Attitude of Satellite Configurations • Spinning satellites – Angular attitude maintained by gyroscopic moment • Randomly oriented satellites and magnetic coil – Angular attitude is free to vary – Axisymmetric distribution of mass, solar cells, and instruments Television Infrared Observation (TIROS-7) Orbital Satellite Carrying Amateur Radio (OSCAR-1) ESSA-2 TIROS “Cartwheel” 2 2 1 2/12/20 Attitude-Controlled Satellite Configurations • Dual-spin satellites • Attitude-controlled satellites – Angular attitude maintained by gyroscopic moment and thrusters – Angular attitude maintained by 3-axis control system – Axisymmetric distribution of mass and solar cells – Non-symmetric distribution of mass, solar cells – Instruments and antennas do not spin and instruments INTELSAT-IVA NOAA-17 3 3 LADEE Bus Modules Satellite Buses Standardization of common components for a variety of missions Modular Common Spacecraft Bus Lander Congiguration 4 4 2 2/12/20 Hine et al 5 5 Evolution -

Guidance, Navigation and Control System for Autonomous Proximity Operations and Docking of Spacecraft
Scholars' Mine Doctoral Dissertations Student Theses and Dissertations Summer 2009 Guidance, navigation and control system for autonomous proximity operations and docking of spacecraft Daero Lee Follow this and additional works at: https://scholarsmine.mst.edu/doctoral_dissertations Part of the Aerospace Engineering Commons Department: Mechanical and Aerospace Engineering Recommended Citation Lee, Daero, "Guidance, navigation and control system for autonomous proximity operations and docking of spacecraft" (2009). Doctoral Dissertations. 1942. https://scholarsmine.mst.edu/doctoral_dissertations/1942 This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. GUIDANCE, NAVIGATION AND CONTROL SYSTEM FOR AUTONOMOUS PROXIMITY OPERATIONS AND DOCKING OF SPACECRAFT by DAERO LEE A DISSERTATION Presented to the Faculty of the Graduate School of the MISSOURI UNIVERSITY OF SCIENCE AND TECHNOLOGY In Partial Fulfillment of the Requirements for the Degree DOCTOR OF PHILOSOPHY in AEROSPACE ENGINEERING 2009 Approved by Henry Pernicka, Advisor Jagannathan Sarangapani Ashok Midha Robert G. Landers Cihan H Dagli 2009 DAERO LEE All Rights Reserved iii ABSTRACT This study develops an integrated guidance, navigation and control system for use in autonomous proximity operations and docking of spacecraft. A new approach strategy is proposed based on a modified system developed for use with the International Space Station. It is composed of three “V-bar hops” in the closing transfer phase, two periods of stationkeeping and a “straight line V-bar” approach to the docking port. -

A Summary of the Rendezvous, Proximity Operations, Docking, And
NASA/TM-2011-217088 NESC-RP-10-00628 A Summary of the Rendezvous, Proximity Operations, Docking, and Undocking (RPODU) Lessons Learned from the Defense Advanced Research Project Agency (DARPA) Orbital Express (OE) Demonstration System Mission Cornelius J. Dennehy/NESC Langley Research Center, Hampton, Virginia J. Russell Carpenter Goddard Space Flight Center, Greenbelt, Maryland April 2011 NASA STI Program . in Profile Since its founding, NASA has been dedicated to • CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space science. papers from scientific and technical The NASA scientific and technical information (STI) conferences, symposia, seminars, or other program plays a key part in helping NASA maintain meetings sponsored or co-sponsored by NASA. this important role. • SPECIAL PUBLICATION. Scientific, The NASA STI program operates under the technical, or historical information from NASA auspices of the Agency Chief Information Officer. It programs, projects, and missions, often collects, organizes, provides for archiving, and concerned with subjects having substantial disseminates NASA’s STI. The NASA STI program public interest. provides access to the NASA Aeronautics and Space Database and its public interface, the NASA Technical • TECHNICAL TRANSLATION. English- Report Server, thus providing one of the largest language translations of foreign scientific and collections of aeronautical and space science STI in technical material pertinent to NASA’s mission. the world. Results are published in both non-NASA channels and by NASA in the NASA STI Report Specialized services also include creating custom Series, which includes the following report types: thesauri, building customized databases, and organizing and publishing research results. • TECHNICAL PUBLICATION. Reports of completed research or a major significant phase For more information about the NASA STI of research that present the results of NASA program, see the following: programs and include extensive data or theoretical analysis. -

Getting in Your Space: Learning from Past Rendezvous and Proximity Operations
CENTER FOR SPACE POLICY AND STRATEGY MAY 2018 GETTING IN YOUR SPACE: LEARNING FROM PAST RENDEZVOUS AND PROXIMITY OPERATIONS REBECCA REESMAN, ANDREW ROGers THE AEROSPACE CORPORATION © 2018 The Aerospace Corporation. All trademarks, service marks, and trade names contained herein are the property of their respective owners. Approved for public release; distribution unlimited. OTR201800593 REBECCA REESMAN Dr. Rebecca Reesman is a member of the technical staff in The Aerospace Corporation’s Performance Modeling and Analysis Department, where she supports government customers in the national security community. Before joining Aerospace in 2017, she was an American Institute of Physics Congressional Fellow handling space, cybersecurity, and other technical issues for a member of Congress. Prior to the fellowship, she was a research scientist at the Center for Naval Analysis, providing technical and analytical support to the Department of Defense, with particular focus on developing and executing wargames. Reesman received her Ph.D. in physics from the Ohio State University and a bachelor’s degree from Carnegie Mellon University. ANDREW ROGERS Dr. Andrew Rogers is a member of the technical staff in The Aerospace Corporation’s Mission Analysis and Operations Department. His expertise is in relative motion astrodynamics, control theory, and space mission design. Rogers supports government customers in the areas of concept- of-operations development, orbital analysis, and small satellite technology development. Prior to joining Aerospace in 2016, Rogers received his Ph.D. in aerospace engineering and a bachelor of science in mechanical engineering from Virginia Polytechnic Institute and State University. CONTRIBUTORS The authors would like to acknowledge contributions from Greg Richardson, Josh Davis, Jose Guzman, George Pollock, Karen L. -
This Version of the Database Includes Launches Through July 31, 2020
This version of the Database includes launches through July 31, 2020. There are currently 2,787 active satellites in the database. The changes to this version of the database include: • The addition of 247 satellites • The deletion of 126 satellites • The addition of and corrections to some satellite data Additions and Deletions for UCS Satellite Database Release August 1, 2020 Deletions for August 1, 2020 Release ZA-Aerosat – 1998-067LU Nsight-1 – 1998-067MF ASTERIA – 1998-067NH INMARSAT 3-F1 – 1996-020A INMARSAT 3-F2 – 1996-053A Navstar GPS SVN 60 (USA 178) – 2004-023A RapidEye-1 – 2008-040C RapidEye-2 – 2008-040A RapidEye-3 – 2008-040D RapidEye-4 – 2008-040E RapidEye-5 – 2008-040B Dove 2 – 2013-015c Dove 3 – 2013-066P Dove 1c-10 – 2014-033P Dove 1c-7 – 2014-033S Dove 1c-1 – 2014-033T Dove 1c-2 – 2014-033V Dove 1c-4 – 2014-033X Dove 1c-11 – 2014-033Z Dove 1c-9 – 2014-033AB Dove 1c-6 – 2014-033AC Dove 1c-5 – 2014-033AE Dove 1c-8 – 2014-033AG Dove 1c-3 – 2014-033AH Dove 3m-1 – 2016-040J Dove 2p-11 – 2016-040K Dove 2p-2 – 2016-040L Dove 2p-4 – 2016-040N Dove 2p-7 – 2016-040S Dove 2p-5 – 2016-040T Dove 2p-1 – 2016-040U Dove 3p-37 – 2017-008F Dove 3p-19 – 2017-008H Dove 3p-18 – 2017-008K Dove 3p-22 – 2017-008L Dove 3p-21 – 2017-008M Dove 3p-28 – 2017-008N Dove 3p-26 – 2017-008P Dove 3p-17 – 2017-008Q Dove 3p-27 – 2017-008R Dove 3p-25 – 2017-008S Dove 3p-1 – 2017-008V Dove 3p-6 – 2017-008X Dove 3p-7 – 2017-008Y Dove 3p-5 – 2017-008Z Dove 3p-9 – 2017-008AB Dove 3p-10 – 2017-008AC Dove 3p-75 – 2017-008AH Dove 3p-73 – 2017-008AK Dove 3p-36 – -

BALL CONFIGURABLE PLATFORM the Combined BCP Series Has Flown for Under Fixed-Price Or Cost-Reimbursable More Than an Equivalent of 85 Years — Contract Types
FEATURES PROVEN RELIABILITY the-art technology demonstration missions, BALL CONFIGURABLE PLATFORM The combined BCP series has flown for under fixed-price or cost-reimbursable more than an equivalent of 85 years — contract types. consistently exceeding spacecraft’s design life A WIDE RANGE OF MISSIONS — demonstrating Ball’s commitment to quality and reliability at an affordable price. The highly agile Ball Aerospace BCP spacecraft line meets customer needs CONSISTENT, INCREMENTAL from initial technology development to ENHANCEMENT prototype demonstration to full, operational mission. The BCP line is flown in a variety Ball continuously evolves our BCP spacecraft of orbits with a wide assortment of family. A long and dependable BCP history payloads, including electro-optical payloads enables incremental improvements to the (imagers and limb scanners) with high spacecraft capability with a focus on reduced accuracy pointing requirements. As a space cost; including high-power systems, low- instrument developer, Ball Aerospace applies mass energy storage/ generation subsystems, its payload/instrument accommodation higher agility, advanced propulsion and higher experience to deliver end-to-end space capacity telecommunications. This approach systems. Our experience gives Ball to spacecraft design, development and Aerospace a mission systems expertise that manufacturing enables Ball to confidently translates into a proven ability to fulfill the support operational missions and state-of- most challenging mission requirements. 2014 Upcoming Launches WorldView-3 GPIM Q2 2018 2009 WorldView-2 2007 BCP 5000 BCP WorldView-1 122 2017 JPSS-1 Design Life 2011 Months Actual Suomi NPP Still Operating as of Dec. 2017 2010 SBSS 2009 Kepler 105 2006 CloudSat 139 Deep Impact 2005 104 EPOXI 2003 BCP 2000 BCP ICESat 2001 QuickBird 160 1999 QuikSCAT 221 1998 GFO 130 1995 RADARSAT 210 When challenging missions require payload and spacecraft 2009 ® WISE GO BEYOND WITH BALL. -

Satellites Added and Deleted for July 1, 2010 Release This Version of the Database Includes Satellites Launched Through July 1, 2010
Satellites Added and Deleted for July 1, 2010 release This version of the database includes satellites launched through July 1, 2010. The changes to this version of the database include: • The addition of 18 satellites • The deletion of 4 satellites • The addition of and corrections to some satellite data Satellites Added Cryosat-2 – 2010-013A Kobalt-M [Cosmos 2462] – 2010-014A X-37B OTV-1 [USA 212) – 2010-015A SES 1 – 2010-016A Parus-99 [Cosmos 2463] – 2010-017A Astra 3B – 2010-021A ComsatBw-2 – 2010-021B Navstar GPS 62 [USA 213] – 2010-022A SERVIS 2 – 2010-023A Compass G-3 – 2010-024A Arabsat 5B – 2010-025A Shijian-12 – 2010-027A Picard – 2010-028A PRISMA – 2010-028B TanDEM-X – 2010-030A Ofeq 9 – 2010-031A COMS-1 – 2010-032A Arabsat 5A – 2010-032B Satellites Removed LES-9 – 1976-023B Galaxy-9 -- 1996-033A SERVIS-1 – 2003-050A Galaxy-15 – 2005-041A Satellites Added and Deleted for April 1, 2010 release This version of the database includes satellites launched through April 1, 2010. The changes to this version of the database include: • The addition of 12 satellites • The deletion of 10 satellites • The addition of and corrections to some satellite data Satellites Added Beidou 3 – 2010-001A Raduga 1M – 2010-002A SDO (Solar Dynamics Observatory) – 2010-005A Intelsat 16 – 2010-006A Glonass 731 [Cosmos 2459] – 2010-007A Glonass 735 [Cosmos 2461] – 2010-007B Glonass 732 [Cosmos 2460] – 2010-007C GOES-15 [GOES-P] – 2010-008A Yaogan 9A – 2010-009A Yaogan 9B – 2010-009B Yaogan 9C – 2010-009C Echostar 14 – 2010-010A Satellites Removed Thaicom-1A – 1993-078B Intelsat-4 – 1995-040A Eutelsat W2 – 1998-056A Raduga 1-5 [Cosmos 2372] – 2000-049A IceSat – 2003-002A Raduga 1-7 [Cosmos 2406] – 2004-010A Glonass 713 [Cosmos 2418) – 2005-050B Yaogan-1 – 2006-015A CAPE-1 – 2007-012P Beidou-2 [Compass G2] – 2009-018A Satellites Added and Deleted for January 1, 2010 release This version of the database includes satellites launched through January 1, 2010.