Design and Operations of Indian Railways
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

C:\Users\ACCER\Desktop\JULY QUESTION LIST\Final Make\Final
LOK SABHA ______ List of Questions for ORAL ANSWERS Wednesday, August 11, 2021/Sravana 20, 1943 (Saka) ______ (Prime Minister; Ministries of Atomic Energy; Coal; Commerce and Industry; Communications; Defence; Development of North Eastern Region; Electronics and Information Technology; External Affairs; Law and Justice; Mines; Parliamentary Affairs; Personnel, Public Grievances and Pensions; Planning; Railways; Space; Statistics and Programme Implementation) (¯ÖϬÖÖ®Ö ´ÖÓ¡Öß; ¯Ö¸ü´ÖÖÞÖã ‰ú•ÖÖÔ; ÛúÖêµÖ»ÖÖ; ¾ÖÖ×ÞÖ•µÖ †Öî¸ü ˆªÖêÝÖ; ÃÖÓ“ÖÖ¸ü; ¸üõÖÖ; ˆ¢Ö¸ü ¯Öæ¾Öá õÖê¡Ö ×¾ÖÛúÖÃÖ; ‡»ÖꌙÒüÖò×®ÖÛúß †Öî¸ü ÃÖæ“Ö®ÖÖ ¯ÖÏÖîªÖê×ÝÖÛúß; ×¾Ö¤êü¿Ö; ×¾Ö×¬Ö †Öî¸ü ®µÖÖµÖ; ÜÖÖ®Ö; ÃÖÓÃÖ¤üßµÖ ÛúÖµÖÔ; ÛúÖÙ´ÖÛú, »ÖÖêÛú ׿ÖÛúÖµÖŸÖ †Öî¸ü ¯Öë¿Ö®Ö; µÖÖê•Ö®ÖÖ; ¸êü»Ö; †ÓŸÖ׸üõÖ; ÃÖÖÓ×ܵÖÛúß †Öî¸ü ÛúÖµÖÔÛÎú´Ö ÛúÖµÖÖÔ®¾ÖµÖ®Ö ´ÖÓ¡ÖÖ»ÖµÖ) ______ Total Number of Questions — 20 VIP References authority empowered to act against companies *321. SHRIMATI SANGEETA KUMARI SINGH following unethical business models and infringing on DEO: the Foreign Direct Investment (FDI) norms in the country, SHRI BHOLA SINGH: particularly in e-commerce sector and if so, the details thereof; Will the Minister of RAILWAYS ¸êü»Ö ´ÖÓ¡Öß (b) whether the Government proposes to set up a be pleased to state: regulatory authority for the e-commerce sector in the (a) whether VIP references for release of HO quota country and if so, the details thereof; by the Ministry of Railways/Indian Railways/Zones are (c) whether the Government proposes to not being given priority in recent times; bring in a national -

History of Rail Transportation and Importance of Indian Railways (IR) Transportation
© IJEDR 2018 | Volume 6, Issue 3 | ISSN: 2321-9939 History of Rail Transportation and Importance of Indian Railways (IR) Transportation 1Anand Kumar Choudhary, 2Dr. Srinivas Rao 1Research Student, MATS University, Raipur, Chhattisgarh, India 2MATS school of Management Studies and Research (MSMSR), MATS University, Raipur, Chhattisgarh, India ____________________________________________________________________________________________ Abstract-Transportation is important part of people which is directly and indirectly connected with people. Its enable trade between people which is essential for the development of civilization. Various authors have described number of dimension regarding the Indian Railways. This study explains history of rail transportation and also describe journey of railway in India and discuss importance about rail transportation. Keywords- History of Rail Transport and Indian Railways, Organisation Chart of IR 1. Introduction Transportation is the backbone of any economic, culture, social and industrial development of any country. Transportation is the movement of human, animal and goods from one location to another. Now a day we are using so many method for transporting like air, land, water, cable etc. transportation is find installation infrastructure including roads, airway, railway, water, canels and pipelines and terminal (may be used both for interchange of passenger and goods). 2. Rail Transport Rail transport is where train runs along a set of two parallel steel rails, known as a railway or railroad. Passenger transport may be public where provide fixed scheduled service. Freight transport has become focused on containerization; bulk transport is used for large volumes of durable item. Rail transport is a means of transferring of passenger and goods on wheeled running on rail, also known as tracks, tracks usually consist of steel rails, installed on ties (sleepers) and ballast. -
Secunderabad Junction :- No
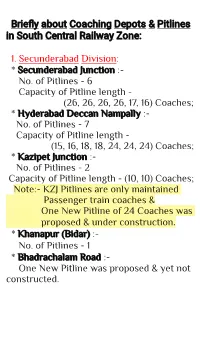
Briefly about Coaching Depots & Pitlines in South Central Railway Zone: 1. Secunderabad Division: * Secunderabad Junction :- No. of Pitlines - 6 Capacity of Pitline length - (26, 26, 26, 26, 17, 16) Coaches; * Hyderabad Deccan Nampally :- No. of Pitlines - 7 Capacity of Pitline length - (15, 16, 18, 18, 24, 24, 24) Coaches; * Kazipet Junction :- No. of Pitlines - 2 Capacity of Pitline length - (10, 10) Coaches; Note:- KZJ Pitlines are only maintained Passenger train coaches & One New Pitline of 24 Coaches was proposed & under construction. * Khanapur (Bidar) :- No. of Pitlines - 1 * Bhadrachalam Road :- One New Pitline was proposed & yet not constructed. 2. Hyderabad Division: * Kacheguda :- No. of Pitlines - 3 Capacity of Pitline length - (24, 24, 24) Coaches; * Kurnool City :- One New Pitline was proposed & yet not constructed. 3. Hazur Sahib Nanded Division: * Hazur Sahib Nanded :- No. of Pitlines - 2 Capacity of Pitline length - (24, 24) Coaches; * Purna :- No. of Pitlines - 1 Capacity of Pitline length - 18 Coaches; Briefly about Coaching Depots & Pitlines in South Western Railway Zone: 1. KSR Bengaluru Division: * KSR Bengaluru City :- No. of Pitlines - 6 Capacity of Pitline length - (24, 24, 24, 21, 24, 24) Coaches; * Yesvantpur :- No. of Pitlines - 4 Capacity of Pitline length - (26, 24, 24, 25) Coaches; * Baiyyappanahalli :- No. of Pitlines - 2 2. Mysuru Division: * Mysuru :- No. of Pitlines - 3 Capacity of Pitline length - (24, 24, 21) Coaches; * Arsikere :- No. of Pitlines - 1 Capacity of Pitline length - 13 Coaches; * Shivamogga :- New Coaching Depot was proposed. 3. Hubballi Division: * Hubballi :- No. of Pitlines - 3 * Vasco Da Gama :- No. of Pitlines - 1 Briefly about Coaching Depots & Pitlines in South Coast Railway Zone: 1. -

Model Request for Qualification for PPP Projects PROJECT
Development of MFC at Miraj Railway Station Rail Land Development Authority MINISTRY OF RAILWAYS RAIL LAND DEVELOPMENT AUTHORITY (RLDA) PROJECT INFORMATION MEMORANDUM FOR MULTIFUNCTIONAL COMPLEX AT MIRAJ Model Rail Land Development Authority Near Safdarjung Railway Station, Moti Bagh-1 RequestNew for Delhi Qualification – 110021 For PPP Projects Project Information Memorandum (PIM) Page 1 Development of MFC at Miraj Railway Station Rail Land Development Authority DISCLAIMER This Project Information Memorandum (the “PIM”) is issued by Rail Land Development Authority (RLDA) in pursuant to the Request for Proposal vide to provide interested parties hereof a brief overview of plot of land (the “Site”) and related information about the prospects for development of multifunctional complex at the Site on long term lease. The PIM is being distributed for information purposes only and on condition that it is used for no purpose other than participation in the tender process. The PIM is not a prospectus or offer or invitation to the public in relation to the Site. The PIM does not constitute a recommendation by RLDA or any other person to form a basis for investment. While considering the Site, each bidder should make its own independent assessment and seek its own professional, financial and legal advice. Bidders should conduct their own investigation and analysis of the Site, the information contained in the PIM and any other information provided to, or obtained by the Bidders or any of them or any of their respective advisers. While the information -

World Bank Document
Document of The World Bank Public Disclosure Authorized Report No: 24004-IN PROJECT APPRAISAL DOCUMENT ONA PROPOSED LOAN Public Disclosure Authorized IN TEHE AMOUNT OF US$ 463.0 MILLION AND A CREDIT IN THE AMOUNT OF SDR62.5 M]LLION (US$79.0 MILLION EQUIVALENT) TO INDIA FOR THE MUMBIAI URBAN TRANSPORT PROJECT Public Disclosure Authorized May 21, 2002 Energy and Infrastructure Sector Unit India Country Management Unit South Asia Region Public Disclosure Authorized CURRENCY EQUIVALENTS (Exchange Rate Effective April 30, 2002.) Currency Unit = Indian Rupee (INR) 1 INR = US$0.020 US$1 = INR 48.00 FISCAL YEAR April I -- March 31 ABBREVIATIONS AND ACRONYMS BEST Brihan Mumbai Electric Supply and Transport Company MCGM Municipal Corporation Greater Mumbai CEMP Community Environment Management Plan CR Central Railway Zone of India Railways CTS Comprehensive Transport Study (1994, PHRD funded) FMR Financial Monitoring Report FOP Financial and Operating Plan, MCGM GOM Government of Maharashtra HLRC High Level Review Committee HDFC Housing Development Finance Corporation HPSC High Powered Steering Committee IMP Independent Monitoring Panel IR Indian Railways, Ministry of Railways MCGM Municipal Corporation of Greater Mumbai MMR Mumbai Metropolitan Region MMIRDA Mumbai Metropolitan Regional Development Authority MRVC Mumbai Railway Vikas Coorporation Limited MSRDC Maharashtra State Road Development Corporation MUTP Mumbai Urban Transport Project MOU Memorandum of Understanding NGO Non-Governmental Organization NSDF National Slum Dwellers Federation PAP Project Affected Persons PAH Project Affected Household PCC Project Coordinating Committee PMR Project Monitoring Report PMU Project Management Unit at MMRDA RAP Resettlement Action Plan RIP Resettlement Implementation Plan R&R Resettlement and Rehabilitation SPARC Society for Promotion of Area Resource Centre TMU Traffic Management Unit, MCGM WR Western Railway Zone of Indian Railways Vice President: Mieko Nishimizu Country Director: Edwin R. -

Wednesday, March 15, 2017/ Phalguna 24, 1938 (Saka) ______
LOK SABHA ___ SYNOPSIS OF DEBATES (Proceedings other than Questions & Answers) ______ Wednesday, March 15, 2017/ Phalguna 24, 1938 (Saka) ______ OBITUARY REFERENCE HON'BLE SPEAKER: Hon'ble Members, I have to inform the House of the sad demise of Shri B.V.N. Reddy who was a member of the 11th to 13th Lok Sabhas representing the Nandyal Parliamentary Constituency of Andhra Pradesh. He was a member of the Committee on Finance; Committee on External Affairs; Committee on Transport and Tourism; Committee on Energy and the Committee on Provision of Computers to members of Parliament. At the time of his demise, Shri Reddy was a sitting member of the Andhra Pradesh legislative Assembly. He was earlier also a member of the Andhra Pradesh Legislative Assembly during 1992 to 1996. Shri B.V.N. Reddy passed away on 12 March, 2017 in Nandyal, Andhra Pradesh at the age of 53. We deeply mourn the loss of Shri B.V.N. Reddy and I am sure the House would join me in conveying our condolences to the bereaved family. The Members then stood in silence for a short while. STATEMENT BY MINISTER Re: Recent incidents of Attack on Members of Indian Diaspora in the United States. THE MINISTER OF EXTERNAL AFFAIRS (SHRIMATI SUSHMA SWARAJ): I rise to make a statement to brief this august House on the recent incidents of attack on Indian and members of Indian Diaspora in the United States. In last three weeks, three incidents of physical attack in the United States on Indian nationals and Persons of Indian Origin have come to the notice of the Government. -

Preparing the Dedicated Freight Corridor Project
Technical Assistance Consultant’s Report Project Number: 42147 November 2010 India: Preparing the Dedicated Freight Corridor Project Prepared by Scott Wilson India Pvt. Ltd. New Delhi, India For Ministry of Railways Government of India This consultant’s report does not necessarily reflect the views of ADB or the Government concerned, and ADB and the Government cannot be held liable for its contents. (For project preparatory technical assistance: All the views expressed herein may not be incorporated into the proposed project’s design. Asian Development Bank Feasibility Feasibility Study: Ludhiana to Khurja Dedicated Freight Corridor Final Report / Contract No. COSO/90-527 (TA 7207-IND) Volume 1 of 4: November 2010 www.scottwilson.com Asian Development Bank Feasibility Study: Ludhiana to Khurja Dedicated Freight Corridor Status: Final Report Report Verification Name Position Signature Date Prepared By: Graham Hewitt Senior Rail Economist 19 th November 2010 Senior Rail th Checked By: Ron Seward 19 November 2010 Engineering Expert Approved By: Kevin Sparrow Project Director 23 rd November 2010 Revision Schedule Revision Date Details of Revision Issued by First Issue 20 Oct 2009 First Issue – Draft Final Report Babu. V VO1 28 Jan 2010 Format/content revised – Draft Final Report Babu. V Operational/Economic review of benefits VO2 06 Oct 2010 accruing from removing freight traffic from Kevin Sparrow row Indian Railways to Dedicated Freight Corridor A further economic review (including environmental) of benefits accruing from VO3 23 Nov 2010 Kevin Sparrow removing freight traffic from Indian Railways to Dedicated Freight Corridor Scott Wilson India Pvt. Ltd. A-26/4 Mohan Cooperative Industrial Estate Mathura Road This document has been prepared in accordance with the scope of Scott Wilson's New Delhi appointment with its client and is subject to the terms of that appointment. -

Godrej Protekt Introduces Persona Products
Godrej Protekt introduces personal & home hygiene range with twelve products; partners with Indian Railways for hygiene-based safe rail travelprogram o With new products, Godrej Protekt forays in segments like soaps, disinfectant sprays, face masks, fruit & veggie disinfectant and dish washing liquid o Partnership with Mumbai division of Central Railwayfor a social initiative to promote safe rail travel and hygiene Mumbai, July 16, 2020: To empower people to live fearlessly in the ‘new normal’,Godrej Protekt, India’s trusted hygiene brand from Godrej Consumer Products Limited (GCPL), introduces a complete personal and home hygiene range of twelve products. Offering 99.9% protection againstgerms, bacteria and viruses, the range includes Godrej Protekt Health Soap, Body Wash, Germ Protection Fruit & Veggie Wash, Germ Protection Dish Wash Liquid, INR 1 Hand Sanitiser Sachet,Air &Surface Disinfectant Spray, On the Go Disinfectant Spray, Surface & Skin Anti-Bacterial Wipes, PW95 Face Masks, and Multipurpose Disinfectant Solution. Till recently, Godrej Protekt was present only in hand hygiene segment with hand sanitisers and handwashes including Mr. Magic – India’s first powder to liquid handwash, in its portfolio. With the new range, Godrej Protekt becomes a complete personal and home hygiene brand. It is foraying for the first time in segments like soaps, disinfectant sprays, face masks, fruit & veggie wash and dish washing liquid.Thus, Godrej Protekt willnow offer hygiene based protection for home, kitchen and personal use. It has also introduced hand sanitiser in a sachet format at INR 1 for the first time. Commenting on the occasion, Sunil Kataria, CEO - India and SAARC, Godrej Consumer Products Limited (GCPL), said, “Godrej Protekt's purpose is to alleviate hygiene concerns of consumers with the personal and home hygiene range. -

Briefly About Coaching Depots & Pitlines in Western Railway Zone
Briefly about Coaching Depots & Pitlines in Western Railway Zone: 1. Mumbai WR Division: * Mumbai Central Coaching Depot :- No. of Pitlines - 4 Capacity of Pitline in length - (24, 23, 22, 21) Coaches; * Bandra Terminus Coaching Depot :- No. of Pitlines - 3 + 1 Washing Line cum Pitline; Capacity of Pitline in length - (24, 24, 24) Coaches; * Surat Coaching Depot :- No. of Pitlines - 3 * Udhna Junction Coaching Depot ( Yet not operational) * Valsad Coaching Depot * Bilimora NG Coaching Depot 2. Vadodara Division: * Pratapnagar (Vadodara) Coaching Depot * Anand Junction Coaching Depot * Miyagam Karjan MG Coaching Depot 3. Ahmedabad Division: * Ahmedabad BG Coaching Depot :- No. of Pitlines - 4 Capacity of Pitline in length - (18, 17, 17, 17) Coaches; * Kankaria Coaching Depot :- { For Ahmedabad } No. of Pitlines - 4 Capacity of Pitline in length - (24, 24, 24, 24) Coaches; * Sabarmati Junction Coaching Depot * Bhuj Coaching Depot No. of Pitlines - 2 * Gandhidham Coaching Depot No. of Pitlines - 2 4. Rajkot Division: * Rajkot :- No. of Pitlines - 3 * Okha Coaching Depot * Hapa Coaching Depot 5. Bhavnagar Para Division: * Bhavnagar Terminal Coaching Depot :- No. of Pitlines - 2 * Porbandar Coaching Depot :- No. of Pitlines - 1 * Veraval BG Coaching Depot :- No. of Pitlines - 1 * Veraval MG Coaching Depot :- No. of Pitlines - 1 6. Ratlam Division: * Indore Coaching Depot :- No. of Pitlines - 4 Capacity of Pitline in length - (24, 24, 24, 9) Coaches; * Ratlam Coaching Depot :- No. of Pitlines - 2 Capacity of Pitline in length - (10, 10) Coaches; * Dr. Ambedkar Nagar Coaching Depot * Mhow MG Coaching Depot :- No. of Pitlines - 2 Washing Cum Pitlines Capacity of Pitline in length - (11, 14) Coaches; Briefly about Coaching Depots & Pitlines in North Western Railway Zone: 1. -

Briefly About Coaching Depots & Pitlines in Central Railway Zone: 1
Briefly about Coaching Depots & Pitlines in Central Railway Zone: 1. Mumbai CSM Terminus Division: * Chhatrapati Shivaji Maharaj Terminus :- No. of Pitlines - 8 Capacity of Pitline in length - (10 to 22) Coaches; * Mazgaon Coaching Depot :- No. of Pitlines - 6 Capacity of Pitline in length - (17 to 19) Coaches; * Wadi Bunder Coaching Depot :- No. of Pitlines - 4 Capacity of Pitline in length - (26, 26, 26, 26) Coaches; * Dadar :- No. of Pitlines - 2 Capacity of Pitline in length - (17, 17) Coaches; * Lokmanya Tilak Terminus :- No. of Pitlines - 8 Capacity of Pitline in length - (26, 26, 26, 26, 26, 26, 26, 26) Coaches; * Neral (NG) Coaching Depot :- No. of Pitlines - 1 Capacity of Pitline in length - 6 Coaches; 2. Pune Division: * Ghopuri Coach Maintenance Complex (GCMC - PUNE) :- No. of Pitlines - 5 Capacity of Pitline in length - (26, 26, 26, 26, 26) Coaches; * New Washing Siding (PUNE) :- No. of Pitlines - 4 Capacity of Pitline in length - (16, 16, 16, 14) Coaches; Note:- 4th Pitline is used for EMU Rake Maintenance * Old Washing Siding (PUNE) :- No. of Pitlines - 2 Capacity of Pitline in length - (24, 15) Coaches; * Miraj :- No. of Pitlines - 2 Capacity of Pitline in length - (12, 12) Coaches; * Kolhapur :- No. of Pitlines - 2 Capacity of Pitline in length - (24, 21) Coaches; 3. Bhusaval Division: * Bhusaval :- No. of Pitlines - 3 * Manmad :- No. of Pitlines - 1 * Amravati Terminal :- No. of Pitlines - 1 * Chalisgaon :- No. of Pitlines - 1 * Murtizapur (NG) :- No. of Pitlines - 1 * Pachora (NG) :- No. of Pitlines - 1 4. Nagpur CR Division: * Nagpur :- No. of Pitlines - 2 Capacity of Pitline in length - (26, 26) Coaches; * Ajni :- No. -
SYNOPSIS of DEBATES (Proceedings Other Than Questions & Answers) ______
Not for Publication For Members only LOK SABHA ___ SYNOPSIS OF DEBATES (Proceedings other than Questions & Answers) ______ Monday, March 15, 2021 / Phalguna 24, 1942 (Saka) ______ ANNOUNCEMENT BY THE SPEAKER HON. SPEAKER: On my own behalf and on behalf of the hon. Members of the House, I have great pleasure in welcoming His Excellency, Shri Duarte Pacheco, the President of the Inter-Parliamentary Union (IPU) who is on a visit to India as our hounoured guest. He arrived in India on Sunday, 14th March, 2021. Today he is seated in the Special Box. Apart from Delhi, he will visit Agra and Goa also before departing from India on Saturday, 20th March 2021. We wish him a happy and fruitful stay in our country. Through His Excellency, we convey our greetings and best wishes to all the hon. members in the IPU, the Government and the great people of Portugal. ________ STATEMENT BY THE MINISTER Re: Recent Developments Pertaining To The Welfare Abroad Of Indians, Non-Resident Indians And Persons Of Indian Origin In The Covid Situation THE MINISTER OF EXTERNAL AFFAIRS (DR. SUBRAHMANYAM JAISHANKAR): I rise to apprise this august House of recent developments pertaining to the welfare abroad of Indians, Non-Resident Indians and Persons of Indian Origin in the COVID situation. This is a subject on which many hon. Members have expressed deep interest. We in the Ministry of External Affairs also regularly receive communications relating to individual cases and respond to the best of our ability. Such concern is natural and I take this opportunity, to place before the House a comprehensive picture on the global state of affairs as a result of COVID, its impact on our people and the Government‘s response to the challenges that have emerged. -

Indian Railway Zones Headquarters and Divisions – PDF Download
Indian Railway Zones Headquarters and Divisions – PDF Download Hello Friends, Hereby we have provided details about Indian Railway Zones, Headquarters and Divisions in PDF Format. It will be useful for upcoming Railway Recruitment Board (RRB) exams and other competitive exams such as UPSC, SSC and Bank exams. Indian Railway Zone Headquarters Divisions Northern Railway Delhi Delhi Ambala Firozpur Lucknow NR Moradabad North Easter Railway Gorakhpur Izzatnagar Lucknow NER Varanasi Northeast Frontier Guwahati Alipurduar Railway Katihar Rangiya Lumding Tinsukia Eastern Railway Kolkata Howrah Sealdah Asansol Malda South Eastern Railway Kolkata Adra Chakradharpur Kharagpur Ranchi South Central Railway Secunderabad Secunderabad (Hyderabad) Hyderabad Nanded Southern Railway Chennai Chennai Tiruchirappalli Madurai Palakkad Salem Thiruvananthapuram Central Railway Mumbai Mumbai Bhusawal Pune Solapur Nagpur For more study material, visit: https://gkbabaji.com/ Page 1 Western Railway Mumbai Mumbai WR Ratlam Ahmedabad Rajkot Bhavnagar Vadodara South Western Railway Hubballi Hubballi Bengaluru Mysuru North Western Railway Jaipur Jaipur Bikaner Ajmer Jodhpur West Central Railway Jabalpur Jabalpur Bhopal Kota North Central Railway Allahabad Allahabad Agra Jhansi South East Central Bilaspur Bilaspur Railway Raipur Nagpur SEC East Coast Railway Bhubaneswar Khurda Road Sambalpur Rayagada East Central Railway Hajipur Danapur Dhanbad Mughalsarai Samastipur Sonpur South Coast Railway Visakhapatnam Vijaywada (Waltair merged) Guntur Guntakal Note: South Coast Railway is a new Railway zone, announced in February 2019. It has been carved out from the existing South Central Railway Zone. Also Read: >>> GK & Current Affairs Videos >>> Latest Current Affairs Topics Thank You GK Babaji For more study material, visit: https://gkbabaji.com/ Page 2 .